Chroniques d’un métier – Chapitre 6 : Les programmes de satellites
Sommaire de navigation
- 6.1 – Les satellites scientifiques
- 6.2 – Les satellites de télécommunications
- 6.3 – L’observation de la terre
- 6.4 – Les programmes militaires
- 6.5 – Les stations de contrôle
6 – Les programmes de satellites
6.1 – Les satellites scientifiques
Les satellites Diamant
En 1964, les appels d’offres du CNES pour les matériels destinés aux premiers satellites de la série Diamant donnent lieu à une sérieuse concurrence entre les équipes de CSF, à Corbeville, et celles de Thomson, à Gennevilliers.
En fait, la première fourniture de matériel embarqué a été celle de l’oscillateur ultrastable du satellite FR1, commandé par le CNES et lancé le 6 décembre 1965 par une fusée américaine Scout. Cet oscillateur a été fabriqué par la Compagnie Européenne de Piezo-Électricité (CEPE), filiale de CSF.
Pour la série Diamant, les deux sociétés font des propositions dans le même domaine technique correspondant à leurs compétences, celui de la télémesure et de la télécommande.
Dans le premier satellite, D1A, CSF gagne les marchés de fourniture de l’oscillateur local et de l’émetteur de télémesure. Thomson gagne ceux du récepteur et du décodeur de télécommande. Dans les deux cas, il s’agit de valoriser et d’étendre des expériences acquises dans les matériels de transmissions militaires. Les émetteurs et les récepteurs fonctionnent dans la bande VHF. L’équipe technique de CSF est dirigée par Willy Martini et celle de Thomson par Roland Gosmand. D1A est mis en orbite le 17 février 1966 par le deuxième lanceur de la série Diamant.
Pour CSF, la série continue avec la fourniture des mêmes types d’oscillateurs locaux et d’émetteurs de télémesures pour D1C, mis en orbite le 8 février 1967, pour D1D, lancé le 15 février 1967, et plus tard pour D2A, lancé le 15 avril 1971.
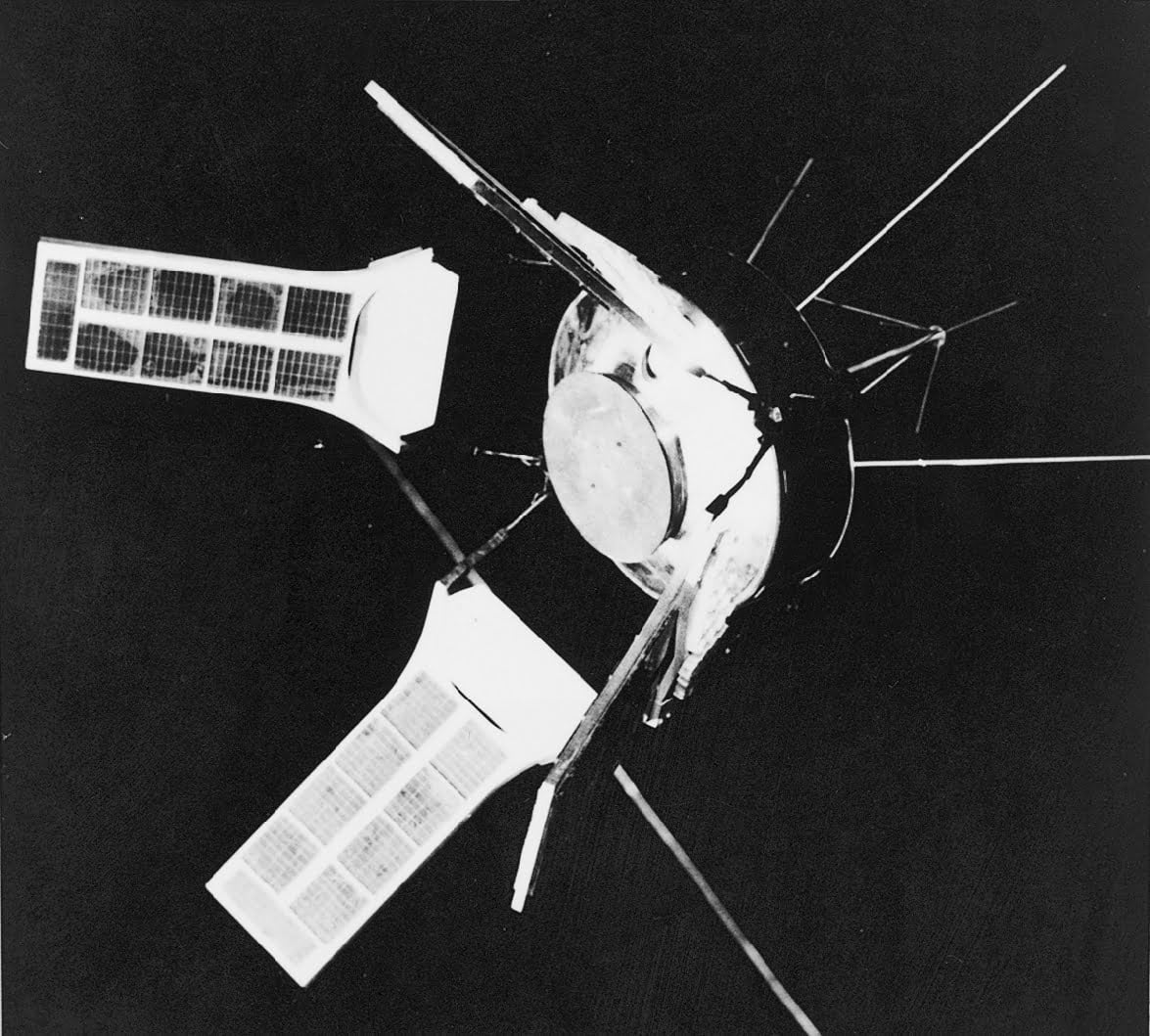
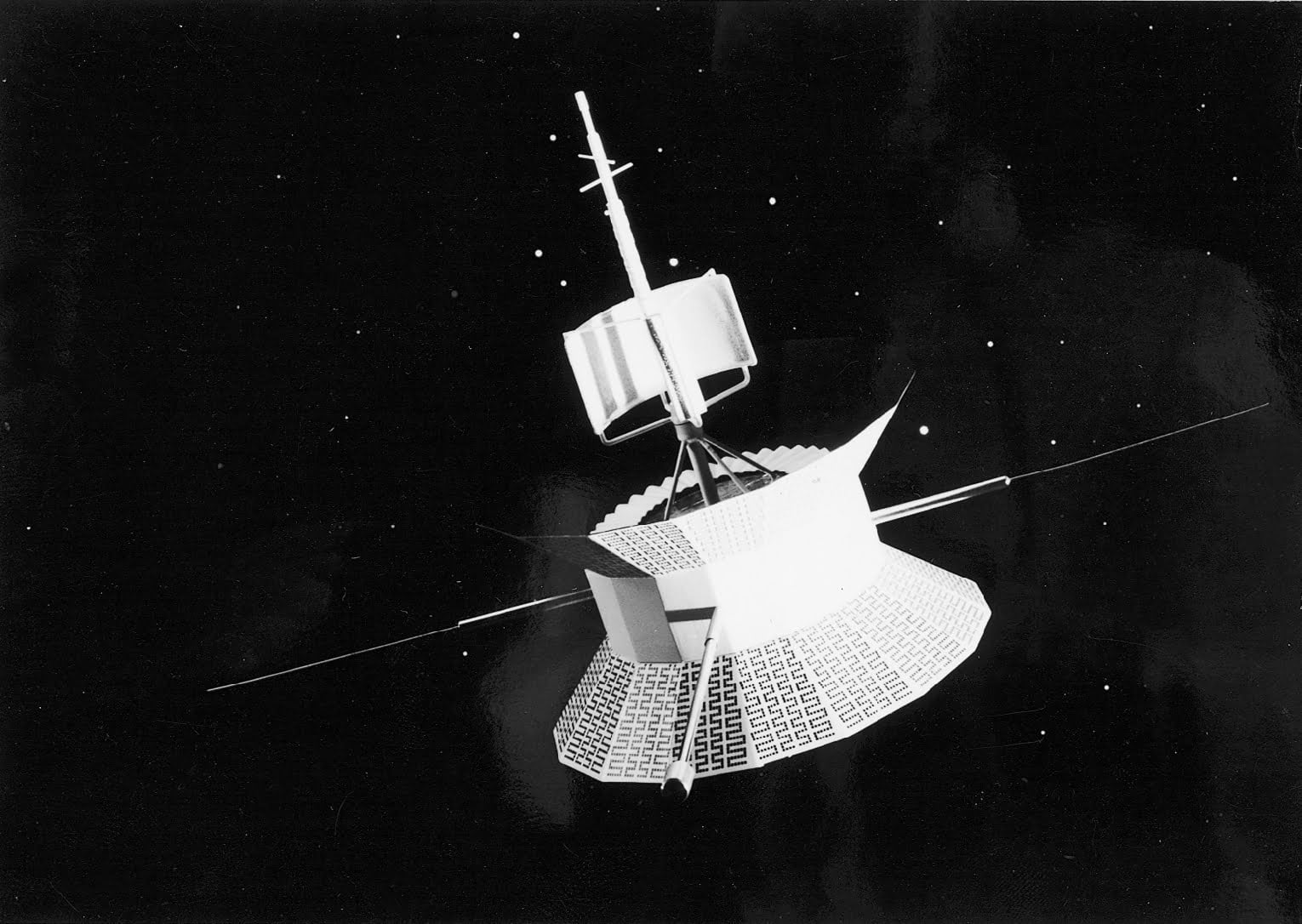
D1 A (DIADEME)
Pour Thomson, la série s’est arrêtée momentanément à D1A, car la concurrence est également très vive avec la société LCT qui a gagné les marchés convoités par Thomson pour les satellites suivants.
Les techniques et les technologies utilisées dans tous les équipements sont celles des matériels militaires de l’époque : transistors, circuits à constantes localisées, circuits imprimés. Le modeste décodeur de télécommande de D1A traite huit ordres au moyen de trois fréquences vocales. L’expérience acquise dans ce programme est à l’origine d’une longue ligne de produits qui, avant et après la réunion des équipes de Thomson et de CSF, connaîtront de nombreux succès, en particulier dans les programmes de l’ESRO et de l’ESA.
Les satellites scientifiques de l’ESRO et de l’ESA : Geos, ISEE B, ISPM / Ulysses, Giotto, Soho, Cluster
Les prestations de Thomson-CSF puis d’Alcatel Espace dans les programmes scientifiques de l’ESA portent, jusqu’aux années 80, sur les matériels de télémesure-télécommande et localisation. Les premières de ces prestations, pour les satellites ESRO I, ESRO II puis HEOS A1 et A2, ont été décrites dans les chapitres précédents.
Après la création du Département Espace-Satellites (ESA puis DSP), le premier programme auquel participe le Service ES, dirigé par Roland Gosmand, est le programme GEOS. Il est suivi des programmes ISEE B, ISPM/Ulysses, et Giotto.
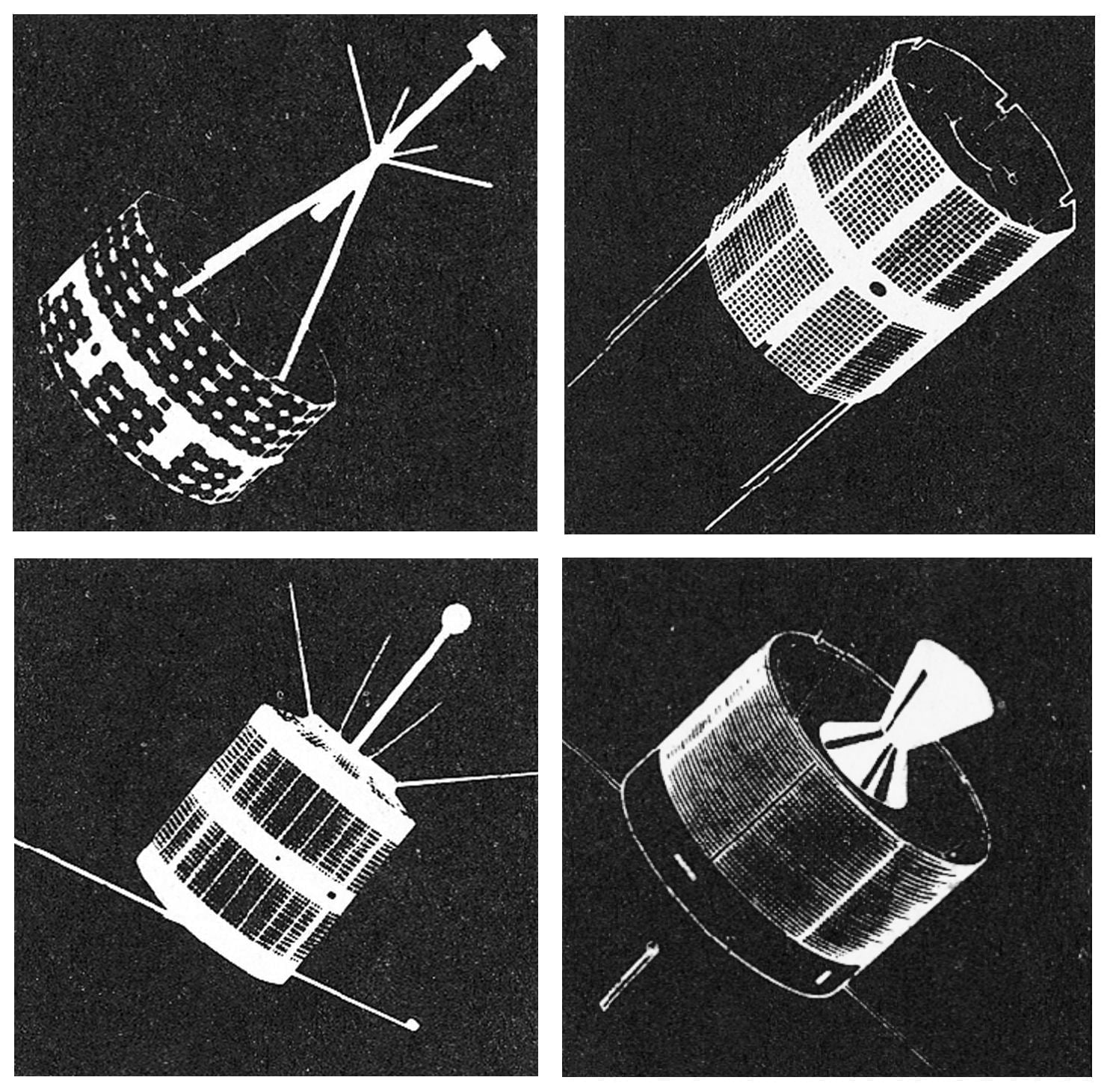
De gauche à droite et de haut en bas : HEOS AI, ESRO II (IRIS), ESRO II (AURORAE), GEOS
Tous ces satellites sont réalisés par le consortium STAR, dont Thomson-CSF, puis Alcatel Espace font partie depuis le début des années 70 et dont l’historique est exposé dans un chapitre particulier.
GEOS
Le programme GEOS, satellite géostationnaire chargé d’effectuer une étude scientifique globale de la magnétosphère (ondes, champs, particules dans une gamme étendue de fréquences et d’énergies) est approuvé par le Conseil de l’ESRO en juillet 1969.
À la suite d’une décision de l’AFC (Comité administratif et financier) de l’ESRO, prise le 14 décembre 1971, deux études de définition (phase B) sont menées en parallèle par les consortiums MESH et STAR. Thomson-CSF apporte sa contribution, pour le sous-système TM-TC, à l’étude conduite par BAC (British Aircraft Company) pour le consortium STAR.
Les rapports d’études correspondants sont remis à l’ESRO fin août 1972 et sont suivis, fin septembre, par deux propositions pour les phases C et D (définition détaillée et réalisation du satellite).
Après une compétition acharnée dans laquelle s’illustre Pierre Gautier, chef du Service Commercial du Département ESA, et où le vote du représentant français à l’AFC s’avère décisif, le consortium STAR emporte l’affaire le 12 décembre 1972. C’est officiellement le 2 janvier 1973 que le Service ES, dirigé par Roland Gosmand, entame la définition détaillée, puis la réalisation du sous-système télémesure-télécommande et localisation.
Dans ce sous-système, le Service ES se charge de réaliser :
– le récepteur de télécommande VHF ;
– le décodeur de télécommande ;
– l’émetteur de télémesure VHF ;
tandis que le Service Hyperfréquences (HY), dirigé par Marcel Palazo, réalise l’émetteur de télémesures en bande S.
Les autres matériels sont sous-traités :
– les antennes VHF et bande S à la société suédoise LM-Ericsson, membre du consortium STAR ;
– le codeur de télémesure à la société italienne Laben, également membre de STAR.
Dans le Service ES, les responsables d’équipements sont MM. Hayard, Le Henaff, Crenol, Aumaitre, Vasseur et Lageste. Jean-François Primard est responsable de l’émetteur bande S au Service HY.
Les études et réalisations sont menées à bien avec la collaboration du Bureau d’Études (Jean Petrotchenko) et des services de Fabrication (Francis Violet), de Qualité (Charles Nicolaus), d’Essais d’Environnement (Vartan Hantcherian), etc.
Les récepteurs et émetteurs VHF sont identiques à ceux développés pour les satellites HEOS A1 et A2. Le décodeur de télécommande utilise la même technologie que celui d’HEOS mais le procédé d’assemblage est une version dérivée du procédé MICAM utilisé par Intelsat IV. Désigné sous le sigle MGM (Multi Grids Module), il est particulièrement bien adapté aux boîtiers «flatpack» alors utilisés pour les transistors et les circuits intégrés. L’émetteur bande S est réalisé en «strip line» sur Téflon et utilise des transistors.
GEOS doit mesurer, entre autres, des champs magnétiques très faibles en continu et en alternatif. La très grande propreté magnétique, exigée dans ce but, de tous les éléments du satellite demande de très gros efforts à de nombreux niveaux : choix des matériaux, précautions d’assemblage pour éviter les boucles de courant, blindages magnétiques, en particulier pour les relais, etc. Des mesures de propreté magnétiques sont conduites dans des sites spécialisés au CELAR à Bruz et chez BAC à Bristol.
Un premier modèle de GEOS est lancé le 20 avril 1977 à partir du centre spatial Kennedy en Floride. Une défaillance du dernier étage du lanceur Thor-Delta ne permet pas au satellite d’atteindre l’orbite de transfert géostationnaire, et la mission de ce dernier ne peut être remplie que très partiellement. Les traversées répétées des ceintures de Van Allen provoquent en particulier une détérioration plus rapide que prévue de son générateur solaire.
Le second modèle, lancé le 14 juillet 1978, remplit parfaitement sa mission.
ISEE B
Le satellite ISEE B (International Sun-Earth Explorer) fait partie d’un programme mis sur pied en coopération par l’ESRO et la NASA.
Deux satellites ISEE A, fournis par la NASA, et ISEE B, fourni par l’ESRO, doivent être placés sur une même orbite fortement excentrique afin d’effectuer des mesures coordonnées de la vitesse et de la direction du mouvement des phénomènes magnétosphériques.
Lors de l’approbation du programme par le Conseil de l’ESRO en avril 1973, ISEE B a été baptisé IME-D (International Magnetospheric Explorer-Daughter), l’autre satellite IME-M (Mother) étant fourni par la NASA. Ce n’est qu’au début de 1974 que le sigle ISEE sera adopté.
À la suite d’une première étude de faisabilité confiée à Hawker Siddeley Dynamics (HSD), un appel d’offres est lancé par l’ESRO pour une phase B compétitive entre deux consortiums.
Mi-avril 1974, les deux consortiums MESH, dirigé par HSD, et STAR, dirigé par Dornier, sont choisis pour mener ces études de phase B d’une durée de cinq mois, à la suite desquelles ils doivent remettre leurs propositions pour la phase de développement et d’intégration (phase C/D).
Le Service ES du Département ESA de Thomson-CSF contribue à l’étude menée par Dornier pour le sous-système télémesure-télécommande, dans les mêmes conditions qu’il l’a fait pour le programme GEOS.
Fin novembre 1974, l’AFC choisit Dornier et le consortium STAR pour mener à bien la phase C/D.
Les tâches confiées à Thomson-CSF sont analogues à celles du programme GEOS, les liaisons de télémesure-télécommande devant, cette fois, être assurées uniquement en bande S. Le Service ES assure la maîtrise d’œuvre du sous-système TM-TC et Claude Payen est désigné comme chef de projet.
Les responsabilités des différents équipements sont réparties comme suit :
– Décodeur de télécommande: Service ES
– Émetteur de télémesure bande S: Service HY
– RFDU (Radio Frequency Distribution Unit): Service HY
– Récepteur de télécommande à bande S: sous-traité à AEG-Telefunken
– Codeur de télémesure: sous-traité à Laben
– Antenne bande S: sous-traitée à LM-Ericsson
Les techniques et technologies employées sont, en général, identiques à celles de GEOS, le décodeur de télécommande comportant cependant un démodulateur de sous-porteuse supplémentaire.
Le choix d’AEG-Telefunken pour fournir le récepteur de télécommande est justifié par l’expérience acquise par cette société dans le programme allemand Helios, qui vient de se terminer et avec qui Thomson-CSF, chargée, dans ce même programme, de l’émetteur de télémesures, a collaboré.
Quant aux autres sous-traitants, ils sont les mêmes que dans GEOS ; l’expérience de travail en commun a été acquise dans le cadre du consortium STAR, et cela facilite les relations à tous les niveaux.
Les principaux ingénieurs responsables dans les différents services du Département ESA (devenu DSP à la fin du programme) sont les mêmes que pour GEOS, à l’exception du Service HY où le responsable de l’émetteur est René Neyer, récemment embauché dans la section dirigée par Jean-François Primard.
Le développement, la fabrication et les essais des matériels ainsi que l’intégration du sous-système TM-TC se déroulent sans incident notable.
Le satellite ISEE B est mis en orbite le 22 octobre 1977 après quelques jours de retard dus à certains doutes des responsables de la NASA sur la fiabilité des propulseurs auxiliaires à poudre de la fusée Delta. L’un de ces propulseurs a en effet provoqué, le 13 septembre 1977, la perte du premier modèle d’OTS, satellite de télécommunications de l’ESA. La mise en orbite d’ISEE B s’effectue correctement, et la mission du satellite est un plein succès. Alors que la durée prévue pour son exploitation est de trois ans, il sera en fait exploité pendant près de dix ans.
Thomson-CSF, en raison du fonctionnement parfait de son sous-système, perçoit le maximum des primes de bon fonctionnement en orbite prévues au contrat. Le dixième anniversaire du lancement donne lieu à une cérémonie chez le maître d’œuvre Dornier, le 22 octobre 1987.
ISPM/Ulysses
Le premier sigle qui désigne ce programme à l’ESA est OOE (Out Of Ecliptic). Il devient, ensuite, ISPM (International Solar Polar Mission) puis, quelque temps avant son lancement, la sonde européenne est baptisée Ulysses.
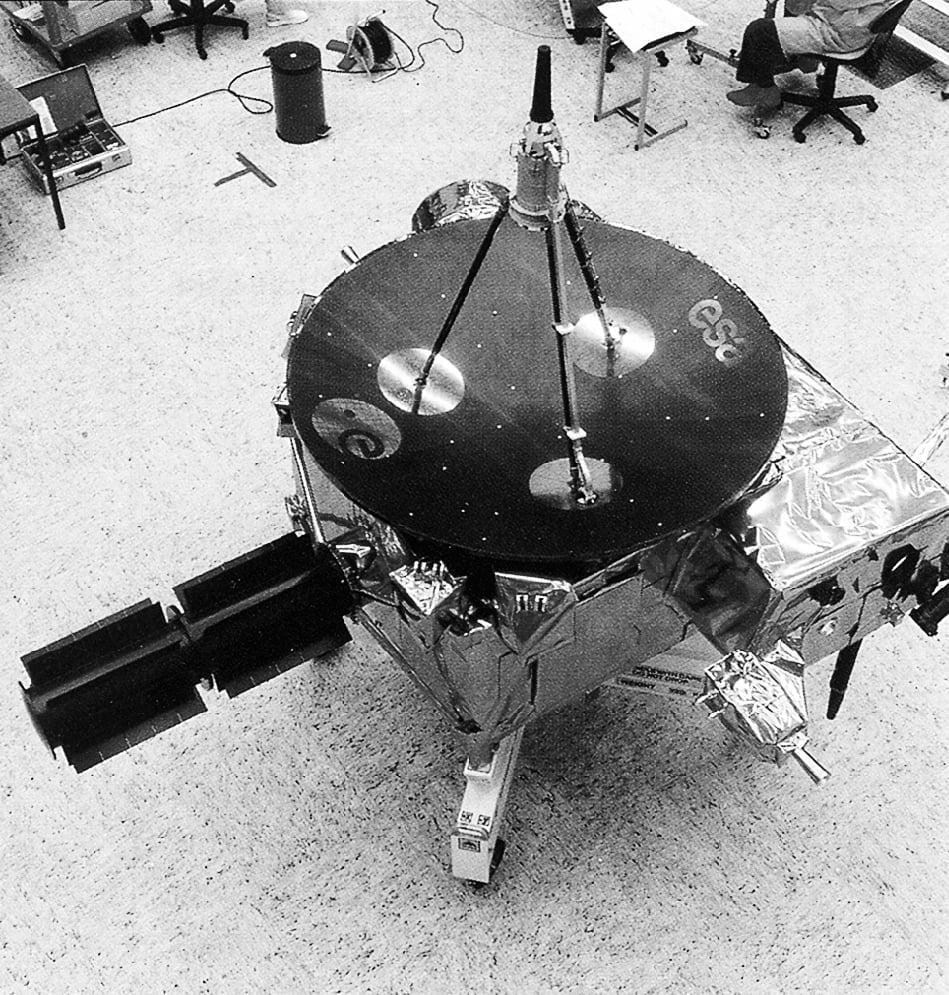
ISPM/Ulysses
À l’origine, le programme prévoit deux sondes, l’une fournie par l’ESA, l’autre par la NASA, qui, sortant du plan de l’écliptique, doivent observer les pôles du Soleil.
Les deux sondes doivent être lancées à partir de la navette spatiale, accélérées ensuite chacune par un IUS (Interim Upper Stage), et utiliser l’attraction de Jupiter pour sortir de l’écliptique dans des directions opposées sur des orbites héliocentriques, afin d’observer chacune les régions voisines de chaque pôle du Soleil. Ce type de trajectoire exclut l’utilisation de cellules solaires pour l’alimentation électrique des sondes. L’énergie doit être fournie dans chacune par un générateur radio-isotopique fourni par la NASA.
La NASA doit fournir au total une sonde, les générateurs radio-isotopiques, ainsi que les lancements par la navette spatiale pour les deux sondes, et le support au sol par le réseau des grandes antennes du Jet Propulsion Laboratory (JPL) à Goldstone. L’ESA doit fournir la seconde sonde.
Le programme, qui démarre en 1979, connaîtra bien des vicissitudes. Pour des raisons budgétaires, la NASA doit renoncer à construire sa sonde. Elle honore malgré tout le reste de ses accords avec l’ESA, en assurant les fournitures et prestations auxquelles elle s’est engagée pour la sonde européenne, qui sera finalement la seule à explorer successivement les deux pôles du Soleil.
L’accident survenu à la navette Challenger le 28 janvier 1986 prolonge le retard, et Ulysses est finalement lancé le 6 octobre 1990.
Les grandes distances parcourues par les signaux de télécommunications conduisent à utiliser la bande S pour la TM-TC à faible débit et la bande X pour les télémesures à haut débit.
La sonde est stabilisée par rotation, et l’axe de l’antenne parabolique à grand gain pointé vers la Terre, par le système de stabilisation, est confondu avec l’axe de rotation. Cependant, compte tenu de la faible ouverture du faisceau d’antenne en bande X, un pointage fin s’avère nécessaire. Il est obtenu par un léger dépointage de la source en bande S, provoquant une modulation d’amplitude du signal reçu en cas de mauvais pointage sur la direction de la station sol. L’information amplitude est transmise au système de stabilisation pour correction éventuelle.
Le consortium STAR, avec pour maître d’œuvre Dornier, a été choisi pour effectuer les travaux de phase B1 commencés le 1er février 1979. Le Département DSP y apporte sa contribution pour la définition du sous-système TM-TC.
La phase C/D de développement de la sonde commence au début de 1980, avec un objectif initial de lancement à la fin de 1983 qui est reporté à 1985, puis à 1986, suite à des décisions de la NASA. L’accident de Challenger impose un nouveau report.
Les travaux de développement du sous-système TM-TC ont commencé à DSP en janvier 1980 sur limite d’engagement partielle car, selon les habitudes prises par l’ESA, le maître d’œuvre Dornier n’a obtenu son contrat que vers la fin de 1980, et le contrat entre Dornier et Thomson-CSF n’a été signé que le 31 décembre 1980.
Le Département DSP a la responsabilité du sous-système TM-TC. La répartition des tâches est la suivante :
– maîtrise d’œuvre du sous-système et intégration, Service ES avec comme chef de projet Claude Payen ;
– transpondeurs bande S/bande X : Service ES avec HY pour la partie hyperfréquences ;
– décodeur de télécommande : Service ES ;
– RFDU (Radio Frequency Distribution Unit) : Service HY ;
– ATOP : Division Tubes de Thomson-CSF, l’alimentation étant fournie par FIAR (Italie) ;
– traitement de l’information et codeur de télémesure : Laben (Italie).
Les équipements sont doublés pour assurer la redondance.
La sonde ISPM est pour DSP l’occasion de renouveler ses types d’équipements.
Le transpondeur bande S équipant le satellite ISEE B était composé d’un récepteur cohérent et d’un émetteur séparé. Il était donc assez encombrant et lourd.
L’ESA a lancé au printemps de 1976 un appel d’offres pour l’étude et le développement d’un transpondeur bande S intégré. Selon ce qui a semblé, à ce moment, être le souhait du client, DSP a négocié un accord de coopération avec Motorola, l’un des spécialistes de ce type de matériel aux États-Unis. L’accord a été signé à Paris le 8 juin 1976. Après quelques péripéties, la proposition de DSP n’a pas été retenue par l’ESA et le marché d’étude a été attribué à Selenia (Italie).
Une étude de marché ayant montré que ce produit doit avoir des débouchés importants dans les programmes futurs de satellites, aussi bien scientifiques que d’applications, la Direction de DSP propose d’entreprendre, sur fonds propres, l’étude et le développement d’un transpondeur bande S, avec en option une sortie, côté émission, en bande X, pour certaines applications particulières. Après de sérieuses réticences, la Direction de la Division DFH, dont DSP fait partie à l’époque, finit par autoriser l’étude qui démarre en 1978. C’est le début d’une ligne de produits qui obtient un plein succès. Les premiers satellites à en être équipés sont SPOT, Telecom 1 et le satellite suédois Viking pour la version bande S, et la sonde ISPM pour la version bande S/bande X.
L’émetteur prévu pour ISPM possède un étage de puissance à transistors délivrant une puissance de 5 watts en bande S et une sortie bas niveau en bande X destinée à alimenter un tube à ondes progressives (TOP).
La Division Tubes de Thomson-CSF, fournisseur des TOP, connaît quelques problèmes de développement qui sont la cause de retards dans leur livraison.
Si le récepteur est développé sans difficultés notables, le développement de l’émetteur, ainsi d’ailleurs que celui du décodeur de télécommande, rencontre un certain nombre de problèmes qui causent des retards dans les livraisons des modèles de vol. D’autres sources de retard, propres au programme ISPM, s’ajoutent aux précédentes.
Compte tenu de l’utilisation d’une source d’alimentation électrique radioactive, et compte tenu également du niveau élevé de radiations prévu lors du passage de la sonde au voisinage de la planète Jupiter, il est nécessaire d’utiliser des composants durcis aux radiations, ce qui rend leur choix assez difficile.
Certains composants du transpondeur, utilisés avec succès dans l’étude initiale, ne peuvent être qualifiés pour les modèles de vol. Il faut procéder à des reprises profondes de certains circuits à un stade tardif du projet, après de longues négociations avec le client et le maître d’œuvre, pour faire homologuer les composants de remplacement :
– dans le développement du décodeur de télécommande, qui fait appel à une technique nouvelle en utilisant un microprocesseur, et, pour des raisons de poids, à une technologie entièrement nouvelle par rapport aux programmes précédents, l’étroitesse du budget du client n’a pas permis de financer un modèle d’identification (engineering model). Il faut passer directement de la maquette au modèle de qualification. Ce modèle ayant échoué aux essais de vibrations, la reprise de l’étude mécanique aboutit à des modifications dont l’exécution est particulièrement longue, étant donné les règles de qualité applicables à un modèle qui est prévu pour être utilisé comme modèle de vol de rechange. Le décodeur démontre finalement d’excellentes performances : taux d’erreurs de bits (BER) à 0,1 dB de l’optimum théorique ;
– dans les deux cas, transpondeur et décodeur, le nombre de reprises exécutées devient tel que ces modèles de qualification sont considérés comme inaptes au vol.
Pour assurer les livraisons contractuelles, et bien que le client ait fait l’économie des modèles d’identification, il faut fabriquer, sans aucun financement supplémentaire de sa part, un nouveau modèle de vol, aussi bien pour le transpondeur que pour le décodeur.
Enfin, au moment des essais thermiques du prototype de l’émetteur, un «mystérieux» problème de dilatations différentielles au niveau de l’étage de puissance provoque des ruptures répétées d’une connexion. Il faudra plusieurs semaines pour élucider les raisons du défaut et pour y remédier.
La fabrication des modèles de vol est de plus sérieusement ralentie par les effets du transfert des équipes de fabrication de Meudon vers Toulouse et par le renouvellement partiel de ces équipes, avec l’indispensable formation des nouveaux arrivants.
Pendant quelque temps, deux équipes de techniciens travaillant en horaires décalés sont mises sur pied pour effectuer les tests du décodeur. Les modèles de vol fabriqués par DSP sont finalement livrés au cours de l’été 1983 pour être intégrés à la sonde qui sera stockée pendant près de sept ans, son lancement, sous le nom d’Ulysses, ayant lieu le 6 octobre 1990.
En raison de la longue durée de ce stockage, les matériels sont sérieusement inspectés avant le lancement, et certains composants, dont la fiabilité est devenue douteuse, sont remplacés. De plus, tous les équipements fournis par ATES connaissent un retour en usine en 1989 pour vérification d’un circuit multiplicateur de fréquences (brasure dans une cavité) et une nouvelle recette complète.
Les matériels fournis par DSP auront, pendant toute la partie de la mission qui se déroulera jusqu’à l’écriture de ces lignes (1997), un comportement quasi parfait.
Outre le chef de projet Claude Payen, les principaux ingénieurs qui participent au développement sont MM. Le Henaff, Riboni, Crenol, Lévêque, Tussac, Gambart, Neyer et d’Hollander.
Giotto
Le programme de la sonde Giotto est approuvé par le comité du programme scientifique de l’ESA en juillet 1980. Il a pour but d’observer de près la comète de Halley dont le passage au périhélion est prévu pour février 1986.

Giotto
Cinq autres véhicules spatiaux, deux soviétiques, deux japonais et un américain, doivent, durant la même période, effectuer également des observations de la comète. Un groupe consultatif inter-agences est alors constitué pour coordonner les expériences et l’analyse de leurs résultats.
Les appareils de Giotto doivent, outre des prises de vue du noyau, analyser sa composition et celle de la queue.
On s’attend, malgré le double bouclier qu’il est prévu d’installer à l’»avant» de Giotto, à ce que la sonde soit endommagée par les particules solides qui constituent la queue de la comète, mais on espère bien que la survie de ses éléments essentiels lui permettra ensuite d’aller observer d’autres comètes.
Dès que les caractéristiques du programme sont connues, le consortium STAR se prépare à la compétition pour construire la sonde.
La désignation du maître d’œuvre au sein du consortium se fait sans difficulté car il n’y a qu’un seul candidat : British Aerospace (BAE). Le Département DSP de Thomson-CSF qui est intégré à la nouvelle Division Espace à partir de 1982, laquelle deviendra Alcatel Thomson Espace en 1984, est chargé comme à l’habitude du sous-système télémesure-télécommande et localisation (TM-TC).
Les caractéristiques générales de Giotto devant être très voisines de celles de GEOS, et les délais alloués à l’étude et au développement étant relativement courts, l’ESTEC (établissement technique de l’ESA) propose de confier l’affaire, sans compétition, à BAE et au consortium STAR, qui ont réalisé GEOS.
Le 30 septembre 1980, elle obtient l’accord de l’IPC de l’ESA pour mettre en œuvre cette solution, et BAE, qui a exécuté un travail de phase A au second trimestre de 1980, entame un certain nombre d’études de définition demandées par l’ESA, avec pour objectif une proposition pour la phase B qui doit commencer en juin 1981.
Au cours de ces études, un certain nombre de désaccords techniques, et aussi de malentendus, surviennent entre les représentants de l’ESTEC et ceux de BAE. La crise en arrive à un tel point que le Président de STAR, qui se trouve être cette année-là Jacques Chaumeron, Directeur de DSP, reçoit de l’ESTEC une sorte d’ultimatum en ces termes : «Le consortium STAR ne conservera l’affaire Giotto qu’à la condition que BAE ne soit pas maître d’œuvre. Sinon, l’affaire sera mise en compétition.»
Bien que cette mise en compétition soit peu probable à cause des retards qu’elle entraînerait dans un planning déjà très serré si l’on veut rencontrer la comète en 1986, il faut prendre l’affaire très au sérieux. L’ESTEC ne cache pas son désir de voir Dornier, qui a effectué une excellente prestation dans ISEE B, prendre la maîtrise d’œuvre, mais, pour des raisons de stratégie commerciale, cette société confirme qu’elle n’est pas candidate. Le Président de STAR doit donc, bien malgré lui, faire œuvre de conciliateur entre l’ESTEC, puis l’ESA, et BAE.
Une fois le maximum de la crise passé, les deux parties acceptent de se parler à nouveau et, le 5 juin 1981, au cours d’une réunion à l’ESA entre le Directeur des programmes scientifiques de l’ESA, le Président de STAR et des représentants des directions générales de Dornier et de la Division Espace de BAE, il est convenu que le programme Giotto restera confié à STAR, avec BAE comme maître d’œuvre, à condition que Dornier, dans une fonction de conseil, fasse profiter BAE de l’expérience acquise dans le «management» du programme ISEE B.
L’alerte a été chaude mais le programme Giotto peut repartir sur la bonne voie. La phase B se déroule jusqu’au printemps 1982.
Le sous-système TM-TC devant être quasi identique à celui d’ISPM, la participation de DSP à cette phase se borne à la fourniture de renseignements techniques et à la participation à quelques réunions. C’est dans les premiers mois de 1982 que le travail s’intensifie avec la préparation de la proposition pour la phase C/D qui se terminera, comme à l’habitude, par une négociation très animée sur les prix.
Le 14 juillet 1982, l’ESA prend la décision d’attribuer à BAE, maître d’œuvre du consortium STAR, le contrat pour la phase C/D du programme Giotto. Ce contrat est officiellement signé le 20 décembre de la même année.
Dès le 15 juillet 1982, le travail commence sur limite d’engagement (LOL), car la sonde doit être livrée à temps pour un lancement en mai 1985.
Le sous-système TM-TC est, comme il a été dit plus haut, identique à celui d’ISPM, à l’exception de l’antenne, beaucoup moins directionnelle et donc sans système de pointage fin. Il n’est pas nécessaire d’utiliser des composants durcis aux radiations comme dans ISPM, ce qui, dans une certaine mesure, rend les approvisionnements plus aisés.
Les délais de livraison sont respectés, le lancement a lieu le 2 juillet 1985, et la mission de Giotto est un plein succès. Le passage près de la comète (600 kilomètres) se produit comme prévu le 13 mars 1986.
Quelques matériels d’expériences sont détériorés pendant la traversée de la queue de la comète mais l’essentiel des équipements du véhicule, dont la TM-TC, reste intact, et le contrôle de la sonde peut être repris pour assurer d’autres missions.
Après différentes manœuvres d’ajustement de l’orbite, Giotto passe, le 10 juillet 1992, à 200 kilomètres de la comète Grig-Skjellerup, et effectue des observations avec les instruments encore en état de marche. Le prochain passage à proximité de la Terre devant permettre une accélération (swing-by) pour aller vers une autre comète est prévu pour le 1er juillet 1999.
À DSP, le chef de projet est Gilles Lévêque et les autres participants sont à peu près les mêmes que pour ISPM.
Soho
Le satellite Soho a pour mission l’observation du Soleil. Le programme est entrepris conjointement par l’ESA et la NASA, l’ESA étant chargée de réaliser le satellite qui doit être lancé par la NASA. Les deux administrations doivent se partager ensuite l’exploitation.
La mission de Soho est associée à celle de Cluster, l’un des plus importants programmes de l’ESA de la fin du siècle. Les observations faites par Soho sur les phénomènes de plasma magnétisé de la couronne solaire doivent être corrélées avec celles de Cluster sur le vent solaire.
Soho, qui doit «stationner» au premier point de Lagrange (1,5 million de kilomètres de la Terre), est stabilisé suivant trois axes. Sa masse est de 1 875 kilos dont 650 kilos de charge utile. La puissance électrique disponible en fin de vie est de 1,4 kW. La durée de vie estimée est de deux ans. L’une des principales difficultés à résoudre pour la mission est la stabilité exigée pour le pointage angulaire (10 secondes d’arc). Six instruments doivent observer l’atmosphère solaire, deux instruments le vent solaire et trois autres la séismologie solaire. Les données des télémesures scientifiques et des télémesures de servitudes sont stockées à bord dans une mémoire à l’état solide d’origine européenne et dans un enregistreur magnétique importé des États-Unis.
MATRA Marconi Space (France) est choisi par l’ESA comme maître d’œuvre pour la construction du satellite. Saab-Ericsson Space (Suède) est responsable du sous-système d’acquisition de données. Dans ce sous-système, le fournisseur des transpondeurs en bande S est Alcatel Espace (ATES) qui a pour sous-traitant Alcatel Espacio (Espagne). Il s’agit de transpondeurs de deuxième génération. Les amplificateurs de puissance en bande S sont achetés directement par l’ESA à un fournisseur américain (Cubic). Les travaux de réalisation commencent en 1991.
Le calendrier de fourniture des équipements d’ATES pour Soho est décalé de plus d’un an par rapport à ceux de Cluster. Dans un souci de réduction des prix, l’ESA négocie la fourniture des équipements de Soho en estimant que les similitudes entre les deux programmes devraient se traduire par la disparition de certaines prestations spécifiques. En réalité, et bien que la définition technique des équipements présente de nombreux points communs, cette similitude n’entraîne pas, de fait, de réduction des coûts industriels. Il faut tenir compte :
– du décalage d’un an entre les deux programmes ;
– des architectures industrielles complexes et différentes d’un programme à l’autre (maîtres d’œuvre différents, un industriel européen apparaissant comme client et comme fournisseur d’ATES) ;
– d’interfaces électriques différentes entraînant des modifications de réalisation et de documentation ;
– des conditions de recette spécifiques de lanceurs différents, Ariane 5 pour Cluster et Atlas pour Soho.
Les responsables techniques d’ATES doivent, pendant un an, faire des efforts pour obtenir la correction de l’hypothèse initiale à laquelle l’ESA reste très attachée.
Finalement, grâce au traitement spécifique de chacun des programmes, leur déroulement s’avère satisfaisant.
Afin de maintenir, malgré tout, une certaine cohérence, un chef de projet unique, Brigitte Jarrousse, reste à leur tête pendant toute leur durée, de 1989 à la fin de 1995.
Soho est mis en orbite le 2 décembre 1995 par une fusée Atlas IIAS à partir du centre spatial Kennedy.
Cluster
La mission de Cluster est l’analyse des champs électromagnétiques et de la distribution des particules dans le vent solaire. C’est une mission purement européenne, entreprise par l’ESA et associée à celle de Soho. Elle comprend quatre satellites lancés simultanément et espacés sur une orbite très elliptique (4 x 19,6 rayons terrestres). La masse de chaque satellite est de 1 200 kilos dont 72 kilos de charge utile pour une puissance électrique disponible de 260 watts en fin de vie. La durée de vie estimée est de deux ans. Les données des télémesures scientifiques et celles des télémesures de servitudes sont stockées dans une mémoire à l’état solide. Les quatre satellites, stabilisés par rotation (15 rpm), permettent de dissocier les fluctuations spatiales des fluctuations temporelles du plasma dans les trois dimensions.
La proposition du consortium STAR, avec Dornier comme maître d’œuvre, est retenue par l’ESA pour la réalisation des satellites. ATES est maître d’œuvre du sous-système TTC (télécommande-télémesure-localisation).
Les travaux commencent en 1989. Les sous-traitants d’ATES sont : Alcatel Espacio pour les transpondeurs en bande S, Saab-Ericsson Space pour les antennes, Schrack (Autriche) et VTT (Finlande) pour les matériels d’essais au sol. Comme pour Soho, le contrat d’approvisionnement des amplificateurs de puissance en bande S est passé directement par l’ESA à Cubic (USA), ATES étant leur destinataire final pour leur intégration dans le sous-système.
Comme pour Soho, les principales difficultés rencontrées dans le déroulement du programme sont dues :
– à la mise en application du principe de l’ESA du juste retour industriel qui conduit à une parcellisation extrême des tâches parmi les industriels européens ;
– à la très forte imbrication des responsabilités entre responsables de sous-systèmes ou d’intégration et fournisseurs de sous-ensembles ou d’équipements.
Au point de vue technique, le programme se déroule sans incident majeur.
Le 4 juin 1996, le lancement simultané des quatre satellites Cluster par le premier exemplaire du lanceur Ariane 5 est un échec.
Eole
Le programme Eole a pour but l’étude et la distribution des vents à haute altitude autour du globe au moyen d’un satellite à défilement, localisant des ballons dérivant au gré des vents. Les ballons doivent évoluer à plafond constant et transmettent au satellite les informations de température et de pression.
Ce dernier interroge périodiquement chaque ballon, le localise et enregistre les informations reçues afin de les retransmettre au sol au moment du passage à portée de la station terrienne.
Eole
Deux services techniques participent à ce programme : le service dirigé par Willy Martini à CSF-Corbeville et le service dirigé par Roland Gosmand à Thomson-Gennevilliers.
Après une certaine concurrence sur les premiers marchés d’étude concernant le programme Eole, chacun de ces services obtient finalement une part de la réalisation du satellite.
Suite à l’appel d’offres n° 2020 du CNES, ce numéro ayant été longtemps utilisé pour définir l’ensemble de cette prestation, Willy Martini est chargé de réaliser, comme sous-traitant de LCT (Laboratoire Central de Télécommunications), les équipements d’émission et de réception en UHF faisant partie du sous-système d’interrogation et de localisation des ballons.
Ce sous-système a une triple mission :
– interrogation individuelle de chaque ballon (envoi d’un ordre de réponse comprenant l’adresse du ballon) ;
– localisation du ballon interrogé, sa direction étant définie par l’angle des directions du vecteur vitesse du satellite et de l’axe satellite, et cet angle étant déterminé par une mesure de l’effet Doppler sur la porteuse. La distance satellite-ballon est fournie par une mesure de phase sur deux sous-porteuses à basse fréquence ;
– décodage des informations aéronomiques fournies par le ballon interrogé.
Les équipements UHF étudiés par l’équipe de Willy Martini comprennent un émetteur à 464 MHz et un récepteur à 401 MHz à détection cohérente. Trois modèles de vol sont livrés à LCT.
L’équipe de Roland Gosmand obtient la maîtrise d’œuvre du sous-système télémesure-télécommande du satellite, qui comprend :
– un récepteur de télécommande ;
– un duplexeur de couplage antenne émetteur-récepteur ;
– un émetteur de télémesure ;
– un codeur de télémesure ;
– un décodeur de télécommande ;
– un convertisseur d’alimentation.
Le codeur de télémesure et le décodeur de télécommande sont fournis par la société Intertechnique et intégrés au sous-système par Thomson.
L’émetteur et le récepteur fonctionnent dans la bande VHF réservée à ces services, respectivement à 136 et 150 MHz.
Les deux équipes étant rassemblées à Vélizy après la fusion de Thomson et de CSF, c’est dans ce nouveau centre que se déroule la fabrication des modèles de vol.
Depuis les débuts de l’activité spatiale, qui a commencé par les programmes Diamant, les services du client, le CNES, ont élaboré progressivement une politique de qualité avec des normes de plus en plus précises et contraignantes. Il reste aux industriels à faire l’apprentissage de l’application de ces normes.
Pour Thomson-CSF, le programme Eole en est l’occasion. Mais au début, tout est loin d’être parfait. Francis Violet, responsable de la fabrication spatiale à Vélizy, et Marcel Putz, responsable de la qualité à cette époque, n’ont encore que peu de moyens et de personnel convenablement formé pour ce genre de travail.
Quelques échantillons technologiques de soudures et de bobinages sont refusés par le CNES, et leur mise en conformité s’avère longue et difficile. Les esprits s’échauffent de part et d’autre jusqu’au point de déclencher, à la fin de 1969, une intervention du Directeur Général du CNES auprès du Directeur Général de Thomson-CSF.
Il y a lieu, à ce point, de préciser que, simultanément à ce problème, un sérieux litige oppose le CNES et les industriels du CIFAS, dont fait partie Thomson-CSF, dans la négociation des prix du programme Symphonie, d’une part, et, d’autre part, des difficultés de mise au point retardent la livraison au CNES des récepteurs de télécommande de destruction qui font partie du dispositif de sécurité de la base de lancement de la fusée Europa II en Guyane (programme baptisé RTG).
Finalement, après de louables efforts, tout rentre dans l’ordre. Tous les matériels sont livrés et recettés. Et après le lancement du satellite, le 16 août 1971, le programme est un succès.
Certaines mauvaises langues insistent même sur le fait que les matériels de Thomson-CSF ont correctement fonctionné dans toutes les conditions et transmis fidèlement tous les ordres, même le jour où un ordre erroné d’autodestruction, transmis par un opérateur, a abouti à la destruction de quelques dizaines de ballons. Il y a lieu de rappeler que l’autodestruction des ballons est normalement prévue lorsqu’ils s’approchent dangereusement des couloirs réservés à la circulation des avions.
Il est nécessaire de signaler que l’équipe de Willy Martini a également obtenu un marché d’étude et de réalisation de prototypes d’un émetteur à 401 MHz et d’un récepteur à 464 MHz à détection cohérente destinés à être embarqués dans les nacelles des ballons.
Les ballons risquant d’évoluer dans le domaine de vol des lignes aériennes, la technologie de réalisation doit répondre à un ensemble de normes de «sécurité aérienne» destinées à assurer la sécurité des aéronefs en cas d’impact. Ces contraintes nouvelles et exceptionnelles posent un certain nombre de problèmes.
Néanmoins, les prototypes sont livrés dans des conditions satisfaisantes. Mais, finalement, le marché de fabrication en série est gagné par une société concurrente.
Helios
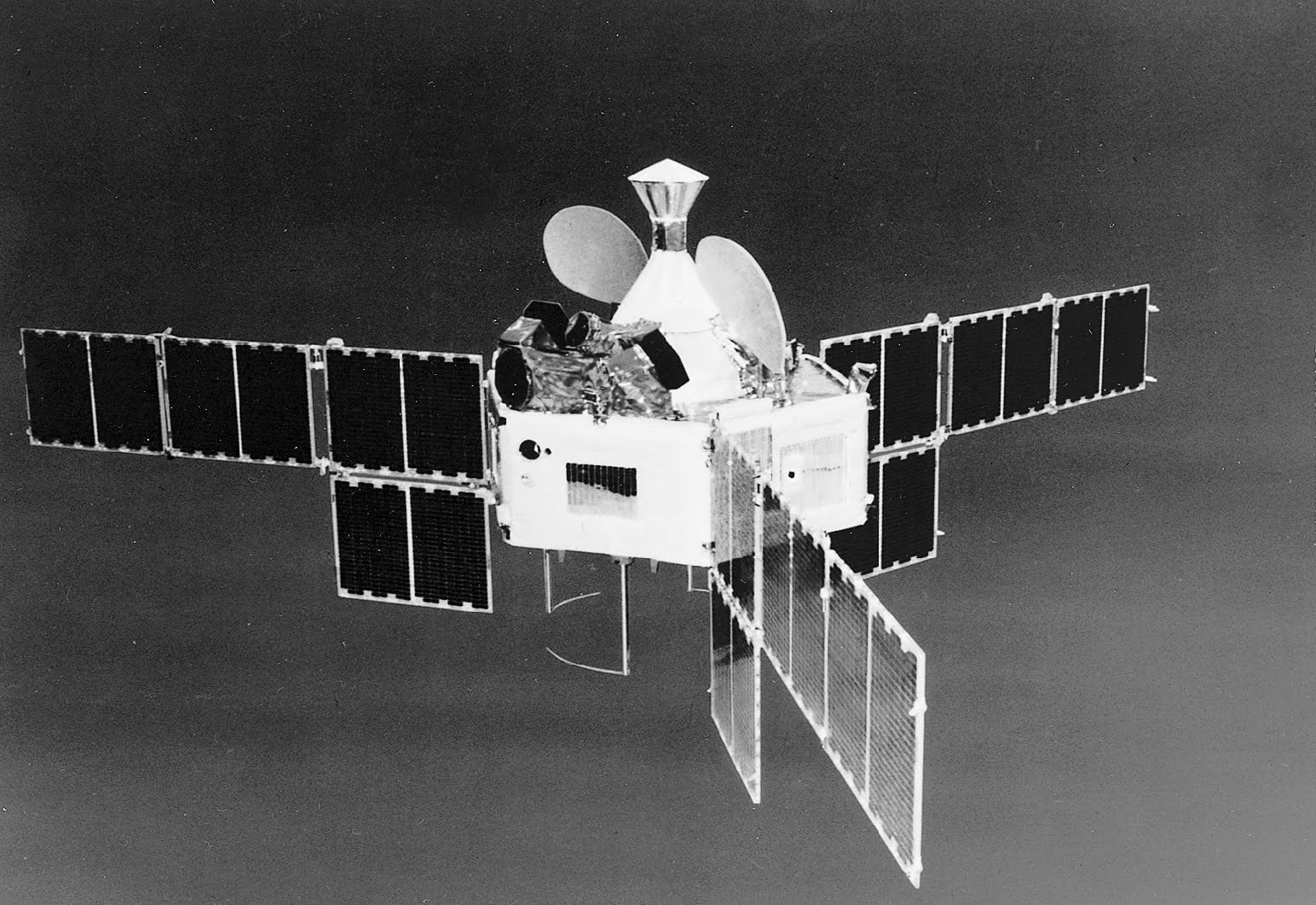
Les sondes Helios 1 et 2 (à ne pas confondre avec les satellites militaires Helios lancés vingt à vingt-cinq ans plus tard) font partie d’un programme scientifique d’observation du Soleil entrepris conjointement par le ministère allemand de la Recherche (BMFT : BundesMinisterium für Forschung und Technologie) représenté par le DFVLR (Deutsche Forschung und Versuchsanstalt für Luft und Raumfahrt, devenu plus tard, DLR) et la NASA.
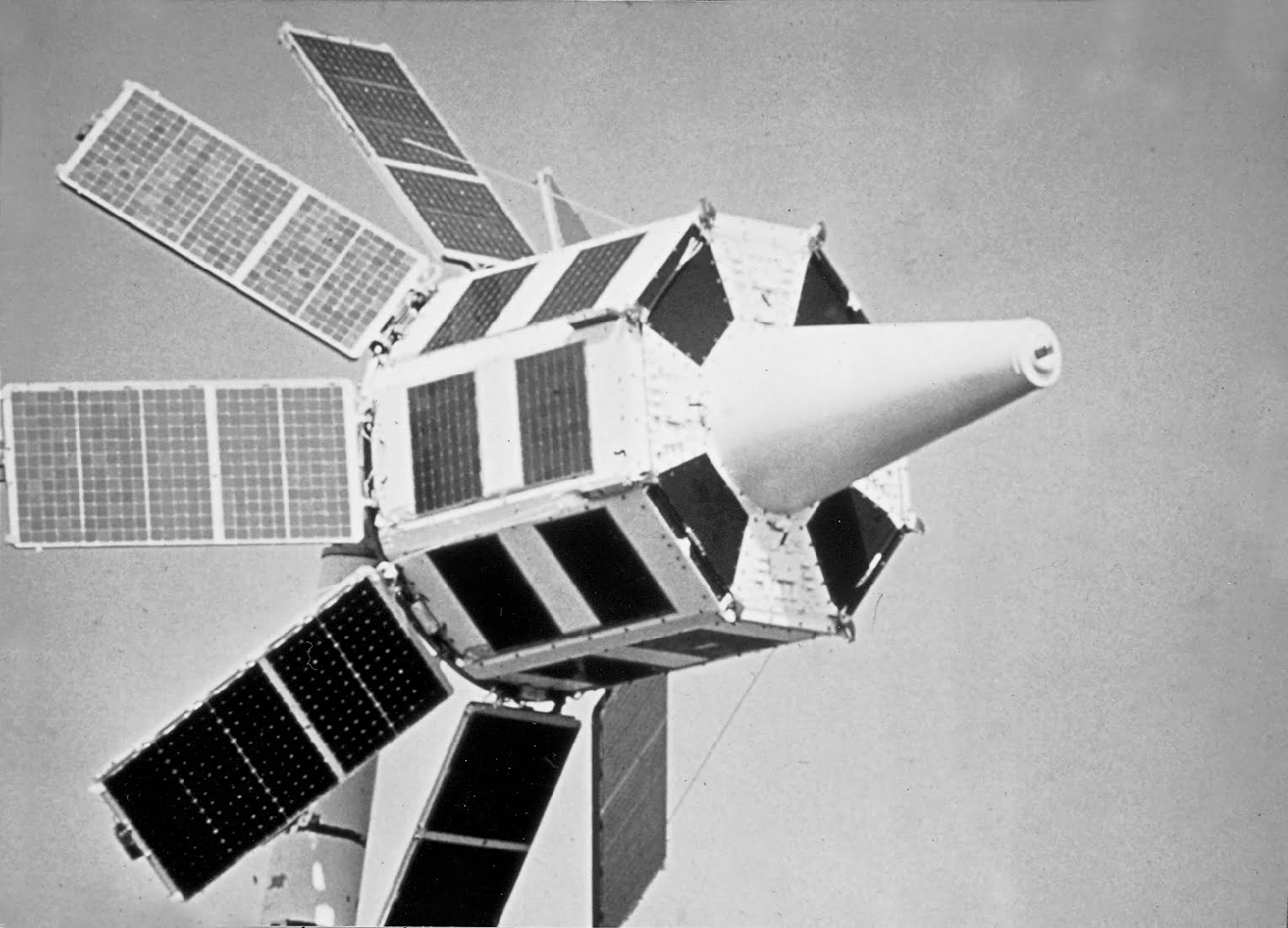
Helios (satellite scientifique allemand)
Les premières discussions officielles germano-américaines sur ce projet de programme remontent à 1966, entre le chancelier allemand Erhard et le président américain Johnson.
Les deux sondes prévues doivent être construites en Allemagne et la NASA doit se charger des lancements. Les communications avec les sondes seront assurées conjointement par les stations du réseau DSN (Deep Space Network) de la NASA, situées à Goldstone (Californie), Canberra (Australie) et Madrid (Espagne), et une station allemande située d’abord à Effelsberg (Eifel) puis à Weilheim (Bavière). L’ensemble des opérations sera dirigé par le centre de contrôle du DFVLR situé à Oberpfaffenhofen (Bavière).
Chaque sonde doit emporter un total de dix expériences, dont sept allemandes et trois américaines, consacrées à l’observation du Soleil et de son influence sur le milieu interplanétaire.
Les trajectoires prévues doivent permettre d’approcher le Soleil jusqu’à environ 0,3 unité astronomique (1 AU = 150 millions de kilomètres, distance de la Terre au Soleil) posant, entre autres, aux constructeurs, de sérieux problèmes d’équilibre thermique et de résistance aux radiations.
La distance maximale pour les liaisons de télécommande et de télémesure doit atteindre 300 millions de kilomètres.
Le marché de maîtrise d’œuvre industrielle est attribué, à la fin de 1969, à la société allemande MBB.
La Division MAS de Thomson-CSF, dirigée par Louis Julien-Binard, a été consultée pour la fourniture des transpondeurs chargés de la réception des signaux de télécommande, de l’émission des signaux de télémesure, et de l’acheminement des signaux de mesure de distance. Cette consultation est le résultat des relations établies avec l’industrie allemande dans le programme Symphonie.

Le châssis « Driver » dans l’émetteur d’Helios
Les spécifications, aussi bien pour l’émetteur que pour le récepteur, qui constituent le transpondeur, semblent particulièrement difficiles à satisfaire, notamment à cause de la fonction «mesure de distance» qui exige une valeur minimale et une très grande stabilité du temps de propagation de groupe («group delay») ; ce genre de difficulté a déjà été rencontré dans le programme Eole, et le Directeur Technique de la Division, Roger Pagazani, ainsi que le chef du Service HY, Marcel Palazo, ne sous-estiment nullement la tâche qui les attend.
Des propositions séparées sont établies pour l’émetteur et pour le récepteur avec quelques doutes sur la faisabilité d’un récepteur entièrement conforme au cahier des charges.
Le marché du récepteur est finalement passé à AEG-Telefunken (établissement d’Ulm) qui est également chargé de l’intégration de l’ensemble du transpondeur. Thomson-CSF obtient le marché de l’émetteur, premier succès remporté à l’exportation face à la concurrence.
La perte du marché du récepteur est presque ressentie à la Division MAS comme un soulagement qui se trouvera justifié plus tard par les énormes difficultés que rencontrera AEG-Telefunken dans l’étude et la réalisation de ce matériel.
Peu après la passation du marché, au printemps de 1970, la Division MAS est dissoute et, à partir du 1er juillet 1970, le Service HY, qui est chargé de l’affaire, appartient au nouveau Département Espace-Satellites, dirigé par Jacques Chaumeron.
Au sein du Service HY, Jean Guillemin est désigné comme chef de projet, et le responsable technique est Jean-François Primard, assisté par Jean-Louis Gautier. Yves Farbos assure le suivi commercial de l’affaire.
En plus des difficultés techniques de l’étude, ces jeunes ingénieurs se trouvent confrontés aux méthodes très formalistes et très pointilleuses de la maîtrise d’œuvre du programme.
Le programme de développement comprend, après quelques travaux sur maquettes, un modèle d’identification (MI), un prototype de qualification (MQ) et deux modèles de vol (MV), chaque équipement étant entièrement redondant.
C’est la première fois qu’est développé en Europe un émetteur en bande S (2,3 GHz) embarqué à bord d’un satellite. Il possède deux étages de puissance : l’un, à l’état solide, fournit une puissance de 1 watt et doit être utilisé pour les liaisons à relativement faible distance de la Terre ; l’autre, équipé de tubes à ondes progressives (TOP) de 20 watts, fournis par la société américaine Watkins-Johnson, doit être utilisé pour les liaisons à grande distance. La cadence des signaux numériques fournis à l’émetteur peut, par télécommande, être adaptée aux caractéristiques de la liaison entre 4 096 bits/s pour les liaisons rapprochées et 8 bits/s pour les distances extrêmes auxquelles doivent évoluer les sondes.
Menés par une équipe dynamique, les études, la réalisation et les essais des différents modèles se déroulent sans incident majeur.
Un fait caractéristique mérite cependant d’être mentionné. À partir du MQ, les essais des matériels doivent être effectués en conformité avec des procédures dûment approuvées par le client. L’équipe de projet du Service HY écrit donc toutes les procédures de test, les soumet au client et commence immédiatement les essais du MQ en conformité avec ces procédures et en présence d’un représentant du client qui fait, bien entendu, dès le départ, des réserves sur le fait que les procédures en question n’ont pas encore été formellement approuvées.
Emportée par son dynamisme, et également afin de tenir les délais de livraison, l’équipe de projet termine les essais avant que l’approbation des procédures n’ait été reçue.
Tous les résultats sont satisfaisants et parfaitement conformes au cahier des charges mais le représentant du client refuse d’y apposer sa signature avant que l’approbation des procédures ne soit notifiée.
Il en résulte une explication plutôt sévère entre Jean-François Primard, responsable technique, très déçu de ne pas voir reconnaître la qualité de son travail, et le représentant du client qui possède suffisamment bien la langue française pour saisir tous les commentaires désagréables qui lui sont adressés et y répondre sur le même ton. L’affaire se poursuit vers 20 heures dans le bureau de Jacques Chaumeron, Directeur du Département ESA, qui s’efforce d’abord de calmer les esprits avant qu’une bonne demi-heure de palabres finisse par convaincre le représentant du client d’apposer sa signature, avec les réserves d’usage, au bas du procès-verbal de recette.
Quelques jours plus tard, l’approbation, sans aucune réserve, des procédures d’essais est officiellement notifiée.
En 1973, l’ensemble des matériels de vol est livré à AEG-Telefunken pour l’intégration des transpondeurs.
Helios 1 est lancé à partir de Cap Canaveral par une fusée Titan IIIE-Centaur le 10 décembre 1974. Le 15 mars 1975, il effectue son premier passage le plus proche du Soleil (périhélion) à 46 millions de kilomètres (0,309 AU). Chaque évolution autour du Soleil dure cent quatre-vingt-dix jours.
La durée minimale de la mission nécessaire pour assurer un maximum d’observations les plus proches du Soleil doit être de cent trente jours, et la durée espérée est de dix-huit mois. L’un des TOP de Helios 1 tombe en panne au bout de onze mois ; grâce à la redondance, la mission peut continuer normalement et, dix ans plus tard, lors de l’anniversaire du lancement, c’est-à-dire en décembre 1984, l’émetteur de Thomson-CSF continue de transmettre les données des diverses expériences encore en service. La seule limitation est la puissance d’alimentation, les cellules solaires de la sonde s’étant dégradées plus rapidement que prévu.
Helios 2 est lancé le 15 janvier 1976 et effectue son passage au périhélion le 17 avril de la même année à une distance du Soleil un peu plus faible (0,29 AU), soit 43,43 millions de kilomètres, que celle d’Helios 1.
L’un des TOP tombe en panne au bout de trois mois mais la relève est assurée par le tube redondant.
À partir du 3 mars 1980, soit un peu plus de quatre ans après le lancement, des anomalies de fonctionnement mal expliquées rendent la sonde pratiquement inexploitable. Les tentatives de récupération sont infructueuses et il est décidé d’interrompre les liaisons avec Helios 2 le 7 janvier 1981, soit au bout de près de cinq ans.
Dans les deux sondes, si l’on excepte les TOP, le fonctionnement des matériels fournis par le Département ESA de Thomson-CSF s’avère être un plein succès qui justifie les félicitations des clients.
Des représentants du Département sont invités, le 10 décembre 1984, à une cérémonie commémorative du lancement d’Helios 1 et de ses dix ans de fonctionnement. Cette cérémonie a lieu au Deutsches Museum de Munich où est exposé, en bonne place avec le prototype d’Helios, un boîtier «driver» de l’émetteur de télémesure réalisé par le Département Espace-Satellites de Thomson-CSF.
Spacelab
Le programme post-Apollo
Au début de 1970, la NASA en a terminé avec les développements ayant conduit au programme Apollo et elle s’efforce de mettre sur pied le programme suivant de vol habité, qui sera celui de la navette spatiale (Space Shuttle).
La première et principale difficulté pour un programme de cette envergure consiste à en faire accepter le budget par le Congrès des États-Unis.
Afin de faciliter l’opération, la NASA tente de lui donner un aspect international. Elle essaye d’intéresser les grands industriels des pays occidentaux à une participation, espérant que leurs gouvernements seront ainsi plus enclins à participer au financement.
En 1969, l’ESRO a déjà accepté, en principe, de participer au développement d’un nouveau Système de Transport Spatial (STS).
Les 3 et 4 juin 1970, les principaux dirigeants de la NASA font à Paris (au Grand Hôtel) une présentation devant les responsables des organisations européennes (ESRO et ELDO), nationales (CNES et autres), et les principaux industriels européens de l’espace, dont Thomson-CSF fait partie. Ils présentent ce qui est appelé à l’époque «Programme post-Apollo». Ce programme comprend, dans une première phase, la navette spatiale, vaisseau habité qui doit permettre de diminuer considérablement le coût des lancements par rapport aux lanceurs de l’époque.
Une phase ultérieure pourra porter sur le développement d’un remorqueur spatial (space tug), véhicule également récupérable qui permettra d’effectuer, à partir d’une navette évoluant en orbite basse, des lancements vers l’orbite géostationnaire.
Les auditeurs des présentations sont impressionnés par les performances annoncées pour le futur système de lancement qui doit être capable d’effectuer jusqu’à une mise en orbite par semaine et, de ce fait, conduire à diviser par dix le prix d’un lancement. C’est la disparition annoncée à long terme des lanceurs non récupérables, et les promoteurs du lanceur européen Europa peuvent à juste titre se poser quelques questions. On sait maintenant quel fut le sort de ces ambitions quelque peu démesurées.
Quelques grands industriels européens pensent qu’il faut absolument entrer dans un tel programme si l’on ne veut pas se trouver hors jeu à relativement court terme.
Comme la coopération US-Europe s’est, dans le passé, révélée difficile, principalement à cause des sévères restrictions apportées par la partie américaine aux échanges de technologies, il semble logique qu’une participation éventuelle porte sur un élément du système que l’Europe puisse développer dans le cadre d’une certaine indépendance.
Dans une première phase, le remorqueur spatial semble répondre à ces critères et l’on voit s’amorcer de grandes manoeuvres pour intéresser les principaux gouvernements européens, ainsi que l’ESRO, à la mise en œuvre du programme où l’on fait miroiter l’avenir des télécommunications par satellites, et donc les besoins futurs de lancements vers l’orbite géostationnaire.
Ne s’attendant pas à pouvoir jouer un rôle majeur dans un tel projet qui sera mené, comme à l’habitude, par des «avionneurs» ou des «missiliers» spécialistes de structures et de propulsion, Thomson-CSF prend une position d’attente tout en maintenant les contacts qui permettraient de lui assurer, le cas échéant, une bonne position dans le domaine de l’électronique.
De leur côté, les industriels américains intéressés au programme de la navette redoublent d’activité pour trouver en Europe d’éventuels sous-traitants capables, de plus, de leur apporter un soutien au niveau politique auprès de leurs gouvernements respectifs.
À ce titre, Thomson-CSF n’est pas oubliée et la Direction du Département DSP reçoit la visite de représentants des principaux candidats à la maîtrise d’œuvre du programme «navette» : General Dynamics, Martin Marietta, sans oublier celui qui gagnera le contrat par la suite, North American Rockwell.
Dans tous les cas, il est clairement précisé que le principe de la participation d’une société européenne est lié au soutien financier que son gouvernement national apportera au programme.
Diverses visites et divers pourparlers occupent l’année 1970 sans déboucher sur aucun résultat concret.
La naissance du Spacelab
De leur côté, les dirigeants de l’ESRO ainsi que certains représentants des pays membres orientent leurs recherches dans une direction quelque peu différente. À l’époque, tout ce qui concerne les lanceurs est du ressort de l’ELDO, l’ESRO voyant son champ d’action limité aux satellites et à leurs charges utiles principalement à usage scientifique. C’est dans cette voie que naît peu à peu l’idée d’un laboratoire qui serait embarqué à bord de la navette. Ce laboratoire comprendrait une partie habitée où se trouveraient les expérimentateurs, l’ensemble de gestion des expériences et quelques-unes d’entre elles, et un ou plusieurs appendices non habités, les «palettes», qui pourraient emporter des expériences devant être exposées directement à l’ambiance spatiale.
L’ESRO passe quelques marchés à l’industrie pour définir ce que devrait être ce laboratoire spatial qui, dans l’espace, restera lié à la navette.
Parmi les gouvernements des pays membres, le gouvernement allemand, sous la pression de ses deux principaux industriels ERNO et MBB, est celui qui soutient au maximum le projet et promet d’y apporter une contribution financière importante.
Étant donné les contraintes apportées par la loi du «juste retour», cette attitude implique à peu près automatiquement que le maître d’œuvre du programme de réalisation soit allemand. Un «package deal», conclu entre les ministres des pays membres de l’ESRO le 31 juillet 1972, attribue à l’Allemagne le pilotage du programme Spacelab, alors que la France se voit attribuer celui du futur lanceur européen, et la Grande-Bretagne celui des satellites de télécommunications maritimes.
Les formations industrielles qui se préparent à la compétition sont les trois consortiums récemment formés : MESH (avec ERNO), Cosmos (avec MBB) et STAR (avec British Aircraft). À cause de la faiblesse prévue de la participation financière du gouvernement britannique, il est peu probable que la maîtrise d’œuvre puisse être confiée à un industriel de ce pays. BAC est éliminé de la compétition à la suite des premières études. Les membres de STAR se trouvent donc libres d’offrir leurs services aux autres consortiums.
La participation de Thomson-CSF
Trouver un créneau dans lequel Thomson-CSF pourrait offrir sa participation apparaît quelque peu difficile. Le domaine privilégié du Département ESA est celui des transmissions (télémesure et télécommande) mais il est prévu que le Spacelab utilise les moyens de transmissions de la navette.
Il se trouve que la Division AVS, dont le Département ESA fait partie, étudie un système avancé de visualisation des données en couleurs pour la planche de bord des avions de combat. Ce système doit utiliser un tube cathodique trichrome à pénétration, développé par la Division Tubes Électroniques (DTE) de Thomson-CSF. Or, il est prévu que le Spacelab, dans le cadre d’un système de traitement à bord des données de servitudes et de celles des expériences scientifiques, possède un système de visualisation. C’est pourquoi la Direction du Département ESA décide de proposer, pour le Spacelab, un système de visualisation utilisant des technologies avancées, dérivé de celui développé par la Division AVS.
Au cours d’une entrevue qui a lieu le 24 janvier 1973 avec un représentant d’ERNO, celui-ci semble séduit par cette proposition et accepte d’entamer des pourparlers qui se poursuivent d’une manière intermittente pendant plus d’un an, non seulement avec ERNO mais également avec Matra qui, dans le projet d’ERNO, doit être responsable du sous-système de traitement à bord. Un travail intensif d’avant-projet commence à DSP en collaboration avec la Division AVS.
En septembre 1973, l’ESRO et la NASA signent un MOU (Memorandum Of Understanding) définissant leurs responsabilités respectives dans le développement, puis l’utilisation du Spacelab. L’ESRO s’engage donc à fournir le Spacelab qui sera ensuite exploité dans la navette par la NASA.
Figurent également dans l’accord des conditions d’assistance réciproques au cours des différentes phases des opérations. L’ESRO peut démarrer son programme de réalisation. Vers le milieu de 1974, ERNO se voit attribuer le marché correspondant.
Thomson-CSF aura encore à faire face à la concurrence, en particulier américaine (Bendix) avant d’obtenir le marché de réalisation de l’ensemble de visualisation. Ce n’est qu’à la fin de 1974 que l’affaire est gagnée et que le travail de réalisation peut commencer avec, de la part d’ERNO, des limites d’engagement (LOL) successives car, conformément aux habitudes prises par l’ESRO/ESA, le contrat final ne sera notifié qu’en 1976. En plus de la fourniture de DSP dans le sous-système de traitement à bord, CIMSA, filiale de Thomson-CSF, fournit les trois ordinateurs du type MITRA 125S qui constituent le cœur du système.
Les travaux
La part de Thomson-CSF est constituée d’écrans de visualisation, de l’électronique de traitement associée qui reçoit ses données du sous-système de traitement de Matra, et du clavier de commande. Deux écrans doivent être installés dans le Spacelab et un troisième dans le cockpit de la navette.
La fourniture comprend, comme à l’habitude, un modèle d’identification, un prototype de qualification et plusieurs modèles de vol, dont les modèles de rechange.
Plus tard, la société Mac Donnell Douglas, qui construira un simulateur d’entraînement pour la NASA, commandera des modèles supplémentaires.
La conception de matériels électroniques destinés à un vaisseau spatial habité est soumise à des contraintes tout à fait nouvelles. L’une des principales est qu’aucun des matériaux utilisés ne doit dégager de gaz susceptible de nuire à la santé des astronautes.
Dans ce but, toute utilisation d’un matériau quel qu’il soit doit être soumise à l’autorisation du maître d’œuvre qui doit à son tour faire approuver cette utilisation par le client ESRO, lequel, en dernier lieu, doit obtenir l’accord de l’utilisateur final, la NASA.
Le système d’autorisations multiples fonctionnera tant bien que mal et, dans certains cas particuliers, il s’écoulera un an environ entre le moment où l’échantillon de matériau sera soumis pour approbation et celui où l’autorisation finale sera donnée.
Ce genre de difficulté, et en général l’extrême lourdeur de l’organisation du programme avec des centres de décision multiples, provoquent d’importants retards à tous les niveaux avec, comme conséquences inévitables, des dépassements financiers.
À Thomson-CSF, une coopération s’est établie entre le Département AVG (Avionique Générale), localisé à Issy-les-Moulineaux, qui, dans la Division AVS, a la charge des visualisations pour planches de bord d’avions, et le Département ESA, chargé de celles du Spacelab.
Il faut, bien entendu, une certaine période aux équipes respectives pour s’habituer à travailler ensemble afin que les contraintes de la technologie spatiale soient bien comprises par les gens de l’avionique, et réciproquement.
Sur le plan technique, en plus du développement du tube trichrome effectué par la Division Tubes Électroniques, les principales difficultés technologiques à résoudre sont liées à l’absence de gravité, d’une part, et aux problèmes de commutation de haute tension pour le tube trichrome, d’autre part.
Les problèmes posés par la non-gravité se présentent pour le refroidissement des circuits. L’air de refroidissement ne peut circuler par convexion, comme en présence de gravité, et il faut étudier des circuits particuliers de ventilation forcée pour s’assurer qu’aucun composant n’opère dans des conditions anormales.
Les problèmes de commutation de hautes tensions viennent du fait que pour commander la couleur du tube à pénétration, il faut assurer cette commutation entre des tensions qui s’échelonnent de 11 000 à 17 000 volts. Il faudra s’y reprendre à plusieurs fois pour qualifier les thyristors qui devront assurer cette commutation, ce qui sera une source d’importants retards.
Le clavier de commande devant être installé dans l’atmosphère respirée par les astronautes, il ne doit ni donner lieu à un dégazage, ni être inflammable. On réalise donc un clavier métallique avec des touches également métalliques. Aucun de ces composants n’existant dans les claviers habituels, il faut les étudier, puis les qualifier.
L’approbation de la géométrie du clavier provoque des difficultés vraiment inattendues pour un problème apparemment aussi simple. Afin d’éviter les contacts intempestifs avec les touches, que risquent de provoquer les astronautes évoluant en absence de gravité, celles-ci doivent être entièrement encastrées dans une grille. Leurs dimensions, ainsi que la section des alvéoles qui les contiennent, sont soigneusement définies et approuvées par le maître d’œuvre puis par l’ESRO. Quelque temps plus tard, la NASA imposera une modification, les alvéoles étant, semble-t-il, trop étroites pour que le «doigt moyen» d’un astronaute américain puisse actionner correctement les touches !!! Là encore, se situe une source de retards et de dépassements financiers.
Le travail d’étude et de réalisation des matériels pour le Spacelab est effectué pour la plus grande part par le Service ES (Électronique Spatiale) du Département ESA qui devient DSP en 1975, dirigé par Roland Gosmand.
Au début de l’affaire, le chef de projet, M. Fischer, appartient au Service Systèmes. En février 1975, il est remplacé par Roger Durand. À partir de juin 1975, la responsabilité de l’affaire est confiée au Service ES où Michel Hayard assure les fonctions de chef de projet, non seulement jusqu’aux dernières livraisons mais au-delà, lorsqu’il s’agit d’assurer la maintenance des équipements.
La tâche du premier chef de projet M. Fischer n’est pas de tout repos. Le programme Spacelab est caractérisé par une inflation de documents diffusés par le maître d’œuvre : spécifications, directives, procédures, questionnaires, demandes de comptes rendus, etc., absolument disproportionnés par rapport à l’importance du matériel à livrer. On voit rapidement le bureau du chef de projet s’emplir de piles de documents qui, bientôt, et faute de place, débordent dans le couloir. Une rumeur, très vraisemblable, dit qu’une partie de ces documents, faute de temps, n’a jamais été lue par qui que ce soit à DSP.
Malgré tous ces aléas, l’affaire Spacelab, si elle n’est pas un succès financier, car la marge brute finale est voisine de zéro, est un succès technique indéniable.
Les premières livraisons portant sur quatre modèles de vol destinés au Spacelab, plus quatre autres modèles de vol destinés à l’entraînement des astronautes, sont achevées en 1980. Une seconde tranche de deux modèles de vol est livrée en 1982.
Le premier vol du Spacelab avec les équipements de DSP a lieu le 28 novembre 1983.

La console de visualisation de Spacelab en orbite
Topex-Poseïdon
L’origine du programme Poséidon se trouve dans une mission scientifique française imaginée par le CNES et destinée à observer la circulation océanique et sa variabilité dans le temps influençant les climats. Cette mission est intégrée dans le projet Topex de la NASA. Six instruments, dont l’altimètre Poséidon, doivent permettre de relever la topographie précise de la surface des océans.
En 1981, une étude de l’ESA constitue ce que l’on convient d’appeler une phase zéro, avec un support du CNES pour les aspects concernant la propagation et les allocations de fréquences. Une fonction annexe de localisation de balises au sol par mesure du temps de propagation aller-retour est envisagée et étudiée avec la collaboration de LCT.
Cette étude est conduite par Jacques Richard, au sein du Service Systèmes (SS2) dirigé par Jean-Claude Héraud, et se termine en février 1982.
La phase A qui suit est essentiellement menée par le CNES qui réalise une maquette de l’altimètre. La Division Espace y fournit l’amplificateur de puissance à l’état solide en bande Ku. Elle développe également, au titre d’un petit marché d’étude, l’algorithme général d’asservissement de l’altimètre à sa mesure, dit «algorithme de poursuite». Yves Jaulhac est le responsable de ce dernier travail.

Topex-Poséidon
L’altimètre de Poséïdon en cours d’intégration
Le marché de la phase B est accordé de gré à gré à Alcatel Espace (ATES), étant entendu que la phase C/D à venir pourra faire l’objet d’une mise en concurrence. Le CNES risque, dans une telle éventualité, de faire appel à MATRA ou à Dassault.
Les travaux commencent officiellement le 15 novembre 1985 pour se terminer le 15 septembre 1986. Pierre de Château-Thierry en est le chef de projet et conservera cette fonction jusqu’à la fin du programme. Toute l’équipe qui y est affectée s’efforce de rendre impossible la mise en concurrence, en exécutant une phase B la meilleure possible et en prenant de l’avance sur d’éventuels concurrents avec le développement d’un simulateur (logiciel) de l’altimètre.
Après la soumission d’une proposition et quelques négociations, le marché de la phase C/D est obtenu. Les travaux commencent le 10 juillet 1987 pour se terminer le 28 septembre 1990 avec la livraison du matériel.
Cet équipement est un télémètre radar monofréquence fonctionnant à 14 GHz, qui comprend deux boîtiers (hyperfréquences et traitement) et un dispositif de calibrage. Il est réalisé en technologie performante : amplificateur de puissance à l’état solide, microélectronique (MIC), implantation haute densité sur polyimide. Il est léger, de faible volume et de faible consommation, souple d’utilisation et performant. La faible erreur instrumentale (bruit RMS et erreurs lentes de l’ordre de 2 à 3 cm) permet d’excellentes mesures d’altitude. L’antenne est commune et partagée dans le temps avec le télémètre bifréquence américain Topex. Les travaux de développement donnent lieu à un certain nombre d’innovations techniques et technologiques : routage des cartes de circuits imprimés, implantation des éléments sur quatorze couches, disposition de drain enterré, partie hyperfréquences composée de plus de cent circuits de microélectronique. Malgré deux mois passés, au cours de la mise au point, à identifier un défaut mécanique dans un circuit, l’altimètre est livré dans les délais contractuels.
Le satellite Topex-Poséidon est placé, le 10 août 1992, par un lanceur Ariane, sur une orbite circulaire d’altitude 1 336 km et inclinée à 66°. Sa durée de vie estimée est de cinq ans.
Le comportement et les performances en orbite de l’altimètre Poséidon donnent toute satisfaction, dépassant quelque peu les espérances initiales. Ils constituent un bon potentiel pour l’avenir. Les seules anomalies constatées sont attribuées à l’effet, sur certains composants, des rayonnements relativement intenses à l’altitude à laquelle évolue le satellite.
L’altimètre de Poséidon en cours d’intégration
Mars Balloon Relay
Le projet Mars Balloon Relay (MBR) fait partie d’une mission scientifique concrétisant une proposition du professeur Jacques Blamont, du CNES, et associé aux programmes américain Mars Observer 92 et russe Mars 94. Le CNES est le responsable scientifique de la mission et coopère avec la NASA américaine et l’organisme russe IKI.
Les sondes russes doivent emporter quatre stations à déposer sur le sol martien et deux ballons destinés à évoluer dans l’atmosphère martienne.
Ce matériel MBR, placé à bord de la sonde Mars Observer, a pour mission d’assurer les liaisons avec l’infrastructure martienne (ballons et stations) dans la bande des 400 MHz : émetteur de télécommande, récepteur de télémesures, antennes. Ces équipements doivent transmettre les interrogations aux matériels d’infrastructure, collecter les données scientifiques qui en proviennent et les localiser en exploitant l’effet Doppler sur la porteuse de télémesure.
La transmission des données vers la Terre doit être assurée par Mars Observer dont la mission principale est de photographier la planète afin d’en effectuer une cartographie précise.
En 1988, le CNES informe Alcatel Espace de son intention de lui faire réaliser l’ensemble MBR. Il s’agit d’un marché de gré à gré mais avec de très fortes contraintes de délai de livraison et, surtout, d’enveloppe financière.
Les équipements doivent s’adapter aux interfaces des systèmes américain et russe. Les spécifications initiales sont très imprécises, et le contexte de la coopération trilatérale (France, USA, URSS) particulièrement compliqué.
L’état d’avancement du projet est également très différent chez l’un et l’autre partenaires. La tâche du premier chef de projet, Laurent Diderot, n’est donc pas particulièrement aisée, d’autant que la première année d’activité, les phases O et A, ne bénéficie d’aucun financement du client qui manifeste malgré tout son impatience de voir les travaux avancer rapidement.
La définition précise des interfaces donne lieu à quelques péripéties car, en 1988, les Américains travaillent déjà depuis plusieurs années sur Mars Observer alors que les Russes ont à peine démarré leur projet en ce qui concerne les stations.
Un voyage à Moscou, organisé en 1988, permet à Laurent Diderot, au prix de quelques savoureuses anecdotes, d’être initié aux méthodes de travail avec les agences soviétiques.
En mars 1989, après une phase B toujours non financée par le client, une proposition lui est remise pour la phase C/D. Les spécifications détaillées des divers éléments du MBR ont été écrites afin de pouvoir lancer des appels d’offres pour leur fabrication.
Quelques difficultés techniques sont apparues, notamment le risque de brouillage des émissions des stations par celles des ballons.
La principale difficulté est cependant d’ordre financier. Le premier devis affiche un prix supérieur au double de l’enveloppe fixée par le client. Après d’actives négociations, il est décidé de sous-traiter la fabrication des cartes à des PME de la région toulousaine. Après une consultation, la société CEIS est retenue.
Alcatel Espace reste maître d’œuvre de l’ensemble et se porte garant des procédures de réalisation et de la qualité du matériel. Il agit également en tant que centrale d’approvisionnement des composants.
Cette organisation est la source de quelques divergences d’opinions, notamment vis-à-vis de la divulgation à un tiers, en l’occurrence CEIS, des procédures de fabrication propres à Alcatel Espace.
Pierre de Château Thierry, chef de projet du MBR pour la phase C/D, à partir de juillet 1989, doit en l’occurrence faire preuve d’une certaine diplomatie pour naviguer entre des positions internes radicalement opposées. Finalement, le tandem Alcatel/CEIS fonctionne bien et prouve son efficacité.
Les livraisons de matériels se terminent en janvier 1992, dans des conditions de performances techniques et de délais très satisfaisantes. Il apparaît, en mars 1992, au cours des essais d’intégration au Mars Observer conduits chez son maître d’œuvre américain GE Astro, que la mauvaise qualité spectrale du signal de référence à 10 kHz, fourni par l’équipement américain, dégrade de façon inacceptable les performances du MBR.
C’est là que la coopération entre Alcatel et CEIS confirme de nouveau son efficacité. Les équipements d’Alcatel sont rapatriés et, en moins d’un mois, équipés d’un générateur autonome à 10 kHz puis intégrés à nouveau dans la sonde chez GE Astro aux États-Unis.
C’est l’occasion pour la Direction Générale du CNES d’exprimer par écrit à Alcatel Espace, en juin 1992, sa «satisfaction tant sur le développement et la réalisation de l’instrument dans un contexte calendaire et budgétaire tendu que sur l’assistance technique apportée à l’équipe Projet CNES pendant les travaux d’intégration et d’essais dans les locaux de GE Astro».
La sonde Mars Observer, qui emporte le MBR, est lancée le 25 septembre 1992. Après un voyage de onze mois (725 millions de kilomètres), avant la mise en orbite autour de Mars, le contact est perdu, la cause probable étant une explosion due à une rupture de canalisation dans le système de propulsion.
À la suite de MBR, Alcatel Espace fournit, toujours avec CEIS, un matériel semblable, le RDM (Relais de Données Martien) destiné à la sonde russe Mars 94, devenue plus tard Mars 96. Le lancement de cette sonde est un échec le 16 novembre 1996.
Enfin, un exemplaire supplémentaire du MBR est fourni pour la sonde américaine Mars Global Surveyor, lancée le 6 novembre 1996. Son fonctionnement est annoncé comme «nominal» après les quarante-huit premières semaines de trajectoire.
6.2 – Les satellites de télécommunications
Symphonie
Les préliminaires
Le 6 juin 1967, une convention est signée entre les gouvernements de la République française et de la République fédérale allemande pour la construction, le lancement et l’utilisation d’un satellite expérimental de télécommunications. Le programme ainsi mis en marche est le résultat de deux séries d’études menées respectivement dans chacun des deux pays.
Symphonie
En France, faisant suite au projet du CNES et du CNET, baptisé SAFRAN, d’un système régional de télécommunications par satellite à défilement, un projet nommé SAROS vise à l’établissement d’un système de télécommunications expérimental par satellite géostationnaire couvrant la métropole, l’Afrique, les Dom-Tom de l’océan Indien, ainsi que la côte est des États-Unis et les Dom-Tom de cette région. L’idée allemande vise à peu près la même zone de couverture avec une finalité à relativement court terme : la transmission vers l’Europe, l’Afrique et l’Amérique des images des Jeux olympiques qui doivent se tenir à Munich en 1972. C’est pourquoi ce programme est baptisé Olympia. En novembre 1966, la France a proposé à l’Allemagne d’associer les deux projets.
Choisir un nom pour un programme coopératif ne sera pas l’une des moindres tâches des négociateurs et, après avoir failli s’appeler Athos alors que les Allemands proposent le nom de Concerto, il héritera du nom à la fois français et allemand de Symphonie.
Du côté des industriels, au fur et à mesure que filtrent les informations préliminaires sur ce que sera le programme, des pourparlers ont lieu pour tenter d’organiser des consortiums en vue de répondre à l’appel d’offres attendu.
Du côté de CSF, on discute beaucoup avec Siemens, en vue d’une alliance éventuelle, ainsi qu’avec Nord-Aviation.
Thomson aussi parle à Nord-Aviation. Pour la petite histoire, à la suite d’une indiscrétion, deux représentants de Thomson se présentent un jour à une réunion entre Nord-Aviation et CSF à laquelle leur présence n’est visiblement pas souhaitée par tout le monde. Il est inutile de préciser quelle sera l’atmosphère de cette réunion où Thomson et CSF se disputeront âprement la responsabilité de l’ensemble de l’électronique du satellite au sein d’un consortium où Nord-Aviation sera le maître d’œuvre.
Ce conflit s’apaise rapidement lorsque paraît, le 13 septembre 1967, le communiqué annonçant la fusion entre CSF et le groupe électronique de Thomson.
Quelques jours plus tard, les différentes sociétés françaises et allemandes intéressées au programme reçoivent un document, daté du 27 septembre 1967, par lequel le Comité exécutif franco-allemand du programme Symphonie donne des informations préliminaires sur le futur appel d’offres.
En même temps est organisée à Bonn une réunion d’information où les industriels, après avoir écouté un exposé explicatif, peuvent poser des questions aux membres du Comité exécutif.
Outre un certain nombre d’informations techniques préliminaires, le document précise le cadre de l’organisation industrielle que doivent adopter les consortiums pour répondre à l’appel d’offres et exécuter ensuite le programme.
Une distinction est faite entre les «avionneurs» et les «électroniciens», ce dernier qualificatif étant attribué à chaque industriel chargé de tout ou partie de l’électronique du satellite, c’est-à-dire le système de télécommunications en hyperfréquences, le système de télémesure et de télécommande, le système d’alimentation en énergie électrique, ainsi que les équipements électroniques de contrôle au sol spécifiques du satellite.
Les consortiums doivent être «dissymétriques», c’est-à-dire comporter chacun une participation «équilibrée» d’avionneurs français et d’avionneurs allemands, et une participation d’électroniciens d’une seule nationalité.
L’adjectif «équilibrée» signifie qu’il faut assurer entre l’ensemble des travaux exécutés en France et l’ensemble des travaux exécutés en Allemagne «une répartition quantitative égale et une répartition qualitative équitable» : cet équilibre s’applique également aux travaux d’intégration du prototype et des deux modèles de vol qui doivent être effectués par la même équipe franco-allemande.
C’est à l’occasion de cette réunion que commence une action de propagande qui, d’abord verbalement dans les couloirs de la réunion, puis dans les colonnes de la presse allemande, cherche à démontrer que l’utilisation d’un satellite stabilisé sur trois axes ferait courir des risques techniques inutiles, et que la seule solution économique pour les contribuables français et allemands consiste à réaliser un satellite stabilisé par rotation avec une antenne formée d’une lentille de Luneberg. Des résultats d’études sur ce sujet sont publiés dans la presse et, ultérieurement, dans une revue technique américaine par l’ingénieur allemand H. W. Scheel, promoteur de cette idée.
L’affaire est prise très au sérieux par les industriels qui concluent finalement que l’antenne proposée, bien que très séduisante a priori, présente néanmoins des inconvénients résultant de son poids élevé ainsi que d’importants risques technologiques liés à sa tenue dans l’ambiance spatiale.
La formation du consortium CIFAS
La période précédant la sortie de l’appel d’offres est quelque peu agitée parmi les industriels. Il faut former des consortiums crédibles, étudier les aspects juridiques de leur formation et se partager les tâches, d’abord dans la proposition puis dans la réalisation des satellites.
Parmi les avionneurs, une séparation se fait quasi naturellement en raison de l’existence de consortiums déjà formés pour répondre aux appels d’offres de l’ESRO.
En France, MATRA est allié à l’avionneur allemand ERNO au sein du consortium MESH, et Nord-Aviation est allié à Bolkow. Ces liens sont donc mis à profit pour le programme Symphonie et l’on voit se constituer l’amorce des deux consortiums qui s’appelleront respectivement Symcosat, conduit par MATRA, et CIFAS, conduit par Nord-Aviation.
L’opération est plus difficile pour les sociétés d’électronique à cause des exigences formulées par les administrations clientes dont l’intervention est nécessaire pour que Siemens, associé à Telefunken, rejoigne le consortium de MATRA et ERNO alors qu’ils ont auparavant souhaité s’allier à Bolkow.
Thomson et CSF, en cours de fusion, se trouvent dans une association qui réunit, sous la maîtrise d’œuvre de Nord-Aviation, Sud-Aviation et SAT (autre électronicien) du côté français, et Bolkow et Junkers du côté allemand.
Avant, puis après la sortie de l’appel d’offres le 29 janvier 1968, un certain nombre de longues et parfois pénibles réunions ont lieu au siège de Nord-Aviation, avenue Bosquet à Paris, pour définir la forme juridique du futur consortium et les rôles des différents membres.
Les participants de la future Thomson-CSF sont, sous la direction de Michel Barré : Vladimir Altovsky, du BAS, Jacques Chaumeron, de la Division Télécommunications, et, lorsque besoin est, les juristes de Thomson : MM. Kreis et Boulou. Ce sont ces derniers, en accord avec les juristes de Nord-Aviation, qui proposent que le consortium se constitue en GIE (groupement d’intérêt économique), toute nouvelle formule de droit français créée par une ordonnance du 23 septembre 1967. Il faudra quelque temps et beaucoup d’explications pour convaincre les partenaires allemands d’adhérer à une formule de droit français qui ne leur est pas familière.
L’accord constituant le GIE est enfin signé le 25 avril 1968, soit trois jours avant la remise de la proposition aux organismes clients.
Le nom choisi pour le consortium est CIFAS (Consortium Industriel Franco-Allemand pour Symphonie). Le premier administrateur-gérant, désigné par Nord-Aviation, est J. Dupin qui a déjà eu la lourde tâche de présider toutes les réunions préparatoires.
Charles Cristofini lui succédera de 1970 à 1973, puis Pierre Usunier, jusqu’à la dernière assemblée qui approuvera la liquidation des comptes le 26 mai 1981.
Durant les années suivant la formation du consortium, des fusions industrielles modifieront sa composition; ce seront celle de Thomson et CSF, qui fera que les nouveaux membres deviendront Thomson-Brandt et Thomson-CSF, celle de Nord-Aviation et Sud-Aviation, qui engendrera l’Aérospatiale (appelée SNIAS pendant les premières années), et enfin celle de Bolkow avec Junkers, puis avec deux sociétés extérieures au consortium, qui donnera lieu à l’apparition de MBB (Messerschmidt, Bolkow, Blohm). Nous verrons plus loin comment le consortium sera encore modifié par l’opération de «symétrisation». On peut trouver plus de détails sur le consortium CIFAS dans l’ouvrage intitulé La coopération internationale entre industries aéronautiques et spatiales, publié en 1995 par l’Académie de l’air et de l’espace.
La proposition
L’appel d’offres pour l’étude et la réalisation du satellite Symphonie (un prototype de qualification et deux modèles de vol) et ses matériels d’essais au sol est publié le 29 janvier 1968 par le Comité exécutif franco-allemand, animé à l’époque par deux secrétaires exécutifs, l’Allemand A. Schendel et le Français G. Dieulot. Le secrétariat exécutif est à la tête d’un groupe de projet composé d’un nombre égal de représentants français et allemands, chargé de gérer le programme au nom des administrations clientes. Son effectif atteint environ une centaine de personnes.
Les réponses à l’appel d’offres sont demandées pour le 29 avril 1968. Elles doivent être intégralement rédigées en deux langues : français et allemand. Plusieurs unités de Thomson-CSF sont impliquées dans la rédaction de la proposition :
– le pilotage d’ensemble est assuré par la Division MRA qui a de plus la responsabilité des antennes hyperfréquences;
– la Division Faisceaux Hertziens de Levallois est chargée de proposer les répéteurs de télécommunications;
– la Division Télécommunications est chargée du sous-système télémesure-télécommande;
– la Division des Travaux Extérieurs est chargée de l’intégration des matériels d’essais au sol dans deux remorques aérotransportables.
La définition des répéteurs donne lieu, au début, à quelques discussions animées car, tant au groupe d’études spatiales de CSF avec Guy Plottin qu’à la Division Télécommunications de Thomson avec Claude Michaud, on a examiné le problème, avant l’appel d’offres et avant les opérations de fusion des deux sociétés. CSF veut mettre en œuvre des techniques d’avant-garde, en particulier pour la tête HF, alors que Thomson préfère jouer la sécurité avec des techniques déjà éprouvées dans les matériels au sol.
Après quelques discussions, le calme revient et les grandes lignes du schéma des répéteurs sont définies. La proposition correspondante est rédigée conjointement par les équipes de DFH-Levallois, qui doivent être responsables de l’étude sous la direction de Philippe Magne, et de MRA-Vélizy qui doivent assurer la réalisation en technologie spatiale. L’ensemble est coordonné par Henri Familier.
La proposition des antennes hyperfréquences est préparée par le Service Hyperfréquences de Vélizy sous la direction de Marcel Palazo assisté de Bruno Vidal Saint-André.
À DTC, le Service NF, dirigé par Roland Gosmand, prend la responsabilité d’ensemble de la proposition du sous-système télémesure-télécommande. Le codeur de télémesures doit être sous-traité à la SAT, membre du consortium, et l’antenne VHF à la société Starec.
Chacune des équipes ci-dessus doit définir et diriger la réalisation des matériels d’essais au sol correspondant à sa fourniture, ces matériels étant ensuite intégrés dans les remorques par la Division Travaux Extérieurs.
La quantité de papier «noircie» pour cette proposition est impressionnante, et les trois mois alloués par les clients pour la rédaction seront à peine suffisants. Un exemplaire de la proposition du CIFAS, dans une seule langue, forme une pile de 1,50 mètre de hauteur. Il faudra, à la fin de la période, faire traduire en allemand la moitié rédigée en français et vice-versa. On aboutit, vers la mi-avril, à une saturation complète des sociétés de traduction de la région parisienne dont MATRA, Nord-Aviation, Thomson-CSF et SAT se disputent les services. Pour écouler cette charge de travail, on fait appel à des traducteurs n’ayant aucune expérience des textes techniques, ce qui rend nécessaire une relecture par des ingénieurs connaissant les deux langues. Dans ce but, Bolkow veut bien détacher à Nord-Aviation et à Thomson-CSF des ingénieurs allemands parlant français.
En désespoir de cause, on demande au client un report de délai, et il est finalement convenu que ne seront livrés le 29 avril que les textes originaux et la proposition de prix, les textes traduits devant être livrés deux semaines plus tard. Compte tenu du nombre d’exemplaires demandés, le CIFAS livrera, le 29 avril, environ une tonne et demie de papier !
La lecture et l’évaluation des propositions constituent une lourde tâche pour le secrétariat exécutif, et ce n’est que le 11 octobre 1968 qu’est annoncée la décision en faveur du CIFAS. C’est là que commence la phase la plus difficile du programme, la «symétrisation».
La «symétrisation»
Conformément aux clauses de l’appel d’offres, les électroniciens français du consortium gagnant CIFAS, Thomson-CSF et SAT, doivent partager l’électronique du satellite à parts égales avec les électroniciens allemands Siemens et AEG-Telefunken, membres du consortium perdant Symcosat.
Thomson et CSF savent, depuis le début, qu’il faudra partager l’électronique avec leurs homologues allemands, mais ils considèrent que, vainqueurs de la compétition, un rôle de chef de file des électroniciens doit leur être reconnu. Ce rôle est continuellement contesté, car le client demande au CIFAS d’adopter le schéma des répéteurs de télécommunications proposé par Symcosat, qu’il juge techniquement meilleur et plus fiable.
À la suite de la fusion de Thomson et de CSF, les activités spatiales de Gennevilliers et de Corbeville sont rattachées, puis transférées, à la Division des Matériels Aérospatiaux (MAS) dirigée par Louis Julien-Binard à Vélizy ; c’est cette unité qui est chargée de négocier la symétrisation. Pour affirmer l’importance de l’électronique dans le projet, et le rôle prépondérant que la société entend y jouer, Guy Leconte est détaché auprès du CIFAS en tant que représentant de Thomson-CSF, chef de file des électroniciens.
Symphonie est un projet européen aux implications politiques considérables ; c’est pourquoi la négociation est conduite par Vladimir Altovsky, Directeur des activités spatiales de Thomson-CSF. Les discussions portent essentiellement sur trois points :
– la conception des répéteurs de télécommunications ;
– une répartition équitable de l’électronique ;
– la reconnaissance du leadership de Thomson-CSF dans la conduite du projet.
La conception des répéteurs proposés par Siemens se révèle effectivement très astucieuse car un seul oscillateur à quartz permet de réaliser les deux transpositions de fréquence de réception et d’émission. On obtient ainsi une stabilité optimale de la fréquence d’émission. En outre, la fiabilité des répéteurs peut se trouver sensiblement améliorée en doublant l’oscillateur local, et ce au prix d’une augmentation minime de la masse du satellite.
Thomson-CSF admet assez facilement ce point de vue et, s’agissant de fiabilité, préfère porter ses critiques sur l’utilisation de diodes tunnel. Ces composants, que Siemens a choisis pour réaliser les préamplificateurs du répéteur, ont en effet donné lieu à des pannes sur un précédent programme Intelsat et c’est pourquoi Thomson-CSF propose des amplificateurs paramétriques n’utilisant que des composants dont la fiabilité est établie. Après enquête, il apparaît que la fiabilité des diodes tunnel ne devrait pas poser de problème en orbite si toutes les précautions sont prises lors de leurs manipulations au sol.
Une répartition équitable de l’électronique entre les industriels français et allemands implique d’abord, à leurs yeux, un partage équitable de la charge utile du satellite constituée par les répéteurs et les antennes de télécommunications. Entre Thomson-CSF et AEG-Telefunken, tous deux candidats à la fourniture des tubes à ondes progressives d’émission, la compétition est particulièrement acharnée. Les deux industriels sont également qualifiés et motivés pour fournir ces tubes, mais la faible quantité nécessaire ne permet pas de partager la fourniture entre eux. C’est grâce à l’appui de l’Administration allemande, qui en a déjà financé une maquette, qu’AEG-Telefunken réalise les tubes délivrant 13 watts à 4 GHz et leurs alimentations.
Dans la charge utile, Thomson-CSF (MAS) obtient les antennes d’émission et l’antenne de réception confiées à l’équipe de Bruno Vidal Saint-André, ainsi que l’oscillateur local et le convertisseur d’émission qui sont développés à Vélizy sous la responsabilité de Marcel Palazo, avec le concours de la Division Faisceaux Hertziens à Levallois pour les études.
Siemens a la responsabilité de l’ensemble répéteurs et réalise notamment les préamplificateurs à diodes tunnel, les convertisseurs de réception et les amplificateurs à fréquence intermédiaire.
Thomson-CSF obtient également la responsabilité de l’ensemble de télémesure-télécommande, antennes VHF comprises. L’équipe de Roland Gosmand réalise l’émetteur de télémesure ainsi que le récepteur et le décodeur de télécommande. Le codeur de télémesure est réalisé par la SAT, membre du CIFAS.
Durant toute la phase de symétrisation, Thomson-CSF manifeste sa volonté de jouer un rôle particulier dans la conduite du projet car, l’électronique embarquée représentant généralement plus de la moitié du coût du satellite, son objectif est d’assurer, à terme, des maîtrises d’œuvre d’ensembles. Cette position de Thomson-CSF suscite une vive opposition de la part des industriels allemands, notamment de Telefunken. De ce fait, les discussions sont longues et difficiles, plusieurs fois proches de la rupture.
Finalement, Thomson-CSF obtient le poste d’adjoint au chef de projet, responsable de l’électronique, mais son rôle de chef de file des électroniciens ne sera jamais véritablement reconnu.
Toutes ces négociations modifient profondément le projet de satellite et il apparaît nécessaire de le redéfinir en détail avant de présenter une proposition définitive au client.
Une phase de définition du projet commence, conduite par le groupe de projet CIFAS dont les effectifs se mettent progressivement en place dans les locaux de la SNIAS aux Mureaux.
La phase de définition du projet (PDP)
C’est en mars 1969 que commence, au titre d’un premier contrat, la phase de définition du projet. Au cours de la période de symétrisation, le CIFAS a commencé à constituer son groupe de projet chargé d’assurer la maîtrise d’œuvre, qui doit s’installer aux Mureaux. Il est dirigé de bout en bout par Pierre Madon de Nord-Aviation puis d’Aérospatiale, assisté de Kuno Schneider de MBB, qui représente l’industrie allemande, et de Guy Leconte, de Thomson-CSF, qui voit ainsi reconnue sa position de «chef de file des électroniciens». En 1971, Guy Leconte sera remplacé par Jacques Dussine.
L’imposant effectif de ce groupe, qui atteint une centaine de personnes, a été calculé en fonction de celui mis en place par les administrations clientes de manière à fournir à ces dernières un nombre suffisant d’interlocuteurs. La plupart de ses membres sont des ingénieurs. Sa composition est établie de manière à satisfaire l’équilibre 50-50 entre la France et l’Allemagne, et à assurer un dosage convenable et acceptable par tous entre les sociétés membres du CIFAS.
L’effectif fourni par Thomson-CSF varie entre quinze et vingt ingénieurs au cours de la vie du programme. Réunir cet effectif dans des délais relativement brefs n’est pas particulièrement aisé, et la Division MRA doit faire appel à du personnel volontaire d’autres divisions.
Un certain nombre de préliminaires contribuent à ralentir le travail. Par exemple, un choix doit être fait entre les normes françaises et les normes allemandes pour les composants. Il faut également faire un compromis entre les règles de qualité du GFW et celles du CNES.
Selon un des paragraphes des spécifications imposées initialement par les clients, tout matériel de vol tombant en panne au cours de ses essais doit être mis au rebut, toute réparation étant interdite comme devant «nuire gravement à la fiabilité de ce matériel». Il apparaît bien évidemment par la suite que ce type d’exigence, bien que marquant un indiscutable souci d’assurer une excellente qualité, est entièrement irréaliste, et les responsables de la qualité continuent de rédiger et de mettre au point des procédures de réparation comme dans les autres projets.
Vers le milieu de 1970, le travail d’avant-projet qui aboutit à l’établissement des spécifications des matériels et des devis correspondants est suffisamment avancé pour permettre la remise au client d’une proposition couvrant la réalisation des satellites.
La remise de la proposition de prix provoque une réaction «explosive» au CNES et au GFW. Les prix sont considérés comme beaucoup trop élevés et le programme risque, de ce fait, de ne pas avoir lieu. Il faut bien constater qu’un souci probablement excessif de perfection dans un premier programme de satellite de télécommunications européen et surtout «non américain» a, des deux côtés, clients et industriels, provoqué une inflation d’exigences et de précautions.
L’affaire des prix remonte d’abord jusqu’aux plus hauts niveaux de la hiérarchie des administrations clientes et des industriels concernés, puis on s’assoit à une table de négociations où, peu à peu, le réalisme reprend le dessus. Le Département ESA ayant été créé entre-temps, c’est Guy Muzard qui supporte le poids principal de ces négociations.
Durant les phases de symétrisation et de redéfinition du projet, une évolution sensible de la parité franc-mark a déséquilibré financièrement le partage obtenu si difficilement quelques mois plus tôt.
La négociation financière ne remet pas en cause le partage mais elle fait apparaître que, pour le premier projet européen de cette nature, de grosses marges pour aléas ont été prises à tous les niveaux.
Finalement, la plupart des provisions pour risques sont regroupées en deux fonds de réserve qui doivent être gérés :
– par le groupe de projet client, pour le système ;
– par le groupe de projet CIFAS, pour les sous-systèmes.
Ces dispositions traduisent en fait l’absence d’un véritable maître d’œuvre qui accepterait d’assumer tous les risques financiers du projet.
En décembre 1970, le contrat entre l’organisme exécutif franco-allemand et le CIFAS est enfin prêt à être signé. La part de Thomson-CSF, qui couvre la TM-TC, l’oscillateur local des répéteurs, le mélangeur d’émission, les antennes hyperfréquences, les deux remorques d’essais du satellite, ainsi que la participation au groupe de projet et à l’intégration, représente environ 80 millions de francs.
Dans ce total, les prix des fournitures de matériels sont établis sur une base forfaitaire alors que la partie concernant la participation au groupe de projet est une estimation, cette partie étant payée en «dépenses contrôlées». Le montant total du contrat s’élève à 400 millions de francs et 320 millions de deutsche Mark.
Les juristes sont également très occupés durant la préparation de ce contrat qui, en raison de la domiciliation du CIFAS, doit être de droit français. C’est la source de nombreuses difficultés avec les industriels allemands, peu familiers avec la réglementation française des marchés de l’État.
Il n’est pas possible, par exemple, d’arriver, pour les révisions de prix, à une formule homogène pour la partie française et la partie allemande. L’une des originalités du contrat est la création d’un fonds de réserve destiné à couvrir le prix d’éventuelles modifications rendues nécessaires par des amendements aux spécifications des matériels, à l’exclusion, bien entendu, de celles demandées par le client.
Du côté des industriels, on souhaite vivement que le contrat soit signé par toutes les parties et notifié avant la fin de l’année 1970. D’après certaines informations, le représentant de l’Administration allemande habilité pour signer doit s’absenter entre Noël et le Jour de l’an. Il faut donc faire vite.
Du côté du CIFAS, dont la composition a été finalisée après la symétrisation, six signatures sont nécessaires : l’Aérospatiale, la SAT, Thomson-CSF, MBB, AEG-Telefunken et Siemens. Rendez-vous est pris à Munich le 21 décembre chez Siemens. Le téléphone ayant abondamment fonctionné la semaine précédente, afin de préciser et mettre au point les dernières virgules, on pourrait penser que la signature est une simple formalité. Cet optimisme s’avère en fait exagéré.
Le premier problème est causé par les conditions climatiques. Les 18 et 19 décembre, les aéroports parisiens sont fermés à cause du brouillard, et il devient incertain pour les Français de pouvoir se rendre à Munich. Par précaution, le chef de projet, Pierre Madon, accompagné d’un membre du groupe de projet, prend le train le 20 décembre avec le lourd fardeau que constituent tous les exemplaires du contrat. La situation atmosphérique semblant s’améliorer, les autres représentants prennent finalement l’avion le 21 au matin.
La séance est ouverte à 10 heures et, immédiatement, les représentants allemands déclarent qu’ils ne peuvent signer le contrat avant d’avoir reçu des éclaircissements sur certains points juridiques. Le président de séance, Pierre Usunier, administrateur-gérant du CIFAS, donne quelques explications à la suite desquelles ses interlocuteurs demandent une suspension de séance pour consulter, par téléphone, leurs juristes.
Il faut, à ce point, signaler que les réunions du Conseil du CIFAS se tiennent en deux langues, français et allemand, avec interprétation simultanée, ce qui, malgré le talent indiscutable du traducteur, n’est pas sans provoquer quelques malentendus.
Le cycle explications-malentendus-suspensions de séance se poursuit toute la journée, même pendant la période des sandwiches qui sont servis pour le déjeuner, puis, quasi miraculeusement, peu après 17 heures, tout le monde est d’accord pour signer et, une heure plus tard, la séance est levée au soulagement général. Malheureusement, le signataire de l’Administration allemande est parti en vacances quelques jours plus tôt que prévu et le contrat n’est notifié aux industriels que le 15 janvier 1971.
Le plus dur reste à faire ; c’est maintenant aux ingénieurs, techniciens et ouvriers de faire du programme un succès.
La phase de réalisation
Symphonie B en phase finale d’assemblage
Au début de 1971, tous les acteurs du programme Symphonie à Thomson-CSF, tout au moins pour la partie «satellite», se trouvent rassemblés au Département ESA à Vélizy. Seule l’étude, jusqu’au stade maquette, de l’oscillateur local des répéteurs et du mélangeur d’émission doit se dérouler à Levallois.
Il faut s’organiser pour assurer la liaison avec le groupe de projet du CIFAS. À cet effet, Roger Durand est nommé chef de projet avec pour mission, côté interne, de coordonner toutes les actions de Thomson-CSF dans les répéteurs, antennes et TM-TC, ainsi que les intégrations qui doivent suivre, et, côté externe, d’assurer la liaison indiquée ci-dessus.
La tutelle pointilleuse du groupe de projet du client, composé d’une cinquantaine de personnes, ainsi que l’obligation de fournir tous les documents en deux langues, alourdissent considérablement la gestion du programme qui, néanmoins, se déroule dans des conditions techniques et financières satisfaisantes.
La TM-TC
L’ex-Service NF de Gennevilliers, qui a rédigé la proposition pour le sous-système TM-TC sous la direction de Roland Gosmand, a été transféré à Vélizy au début de 1970 et a pris le nom de Service ES (Électronique Spatiale).
Il doit être responsable de l’ensemble du sous-système TM-TC et bénéficie pour cela de l’expérience récemment acquise dans le programme HEOS.
Le sous-système comprend les matériels suivants :
– récepteurs VHF de télécommande ;
– émetteurs VHF de télémesure ;
– duplexeur VHF ;
– décodeur de télécommande ;
– codeur de télémesures ;
– antenne VHF d’émission-réception.
Certains de ces matériels ont une complexité très supérieure à celle des premiers satellites Diamant.
Le décodeur de télécommande doit traiter 123 ordres «tout ou rien» et 17 ordres de téléaffichage de 8 bits, alors que le codeur de télémesures doit émettre 198 paramètres à 8 bits par seconde et 24 paramètres à 64 bits par seconde. Ce codeur est sous-traité à la SAT alors que les antennes VHF sont sous-traitées à la Starec. Pour gérer l’ensemble du programme, coordonner les actions internes et externes et assurer la liaison avec les responsables de la TM-TC au groupe de projet CIFAS, un chef de projet TM-TC est nommé : Jean de La Rochefoucauld.
Les mêmes technologies que pour HEOS sont utilisées. Les parties radiofréquences sont construites en circuits localisés à base de transistors. Le décodeur à tons codés est assemblé en modules cordwood. Le développement ne pose pas de problème particulier mais un sérieux problème de fabrication mérite d’être mentionné. Les responsables de l’atelier de câblage chercheront pendant de longues semaines pourquoi les circuits intégrés du premier décodeur de télécommande sont parfois endommagés et rendus inutilisables pendant les opérations de regroupement des différents modules.
Toutes les installations de câblage et d’essais de la salle blanche seront «passées au peigne fin» et l’on finira par découvrir que les dégâts sont causés par les régimes transitoires créés par la commutation des thermostats des fers à souder.
Il faudra revenir en arrière sur ce que l’on avait pensé être une amélioration du procédé de fabrication. Les thermostats seront supprimés et il n’y aura plus aucun problème.
Le décodeur en question, convenablement réparé, mais toujours refusé par le client qui craint une détérioration de sa fiabilité, prouvera par la suite, au cours d’essais de vieillissement accéléré, qu’il aurait été capable d’assurer sans défaillance la mission d’un modèle de vol.
Les antennes hyperfréquences

Les antennes de Symphonie
Les spécifications initiales de l’appel d’offres prévoient pour le sous-système antennes les couvertures suivantes :
– en réception, couverture globale avec une ouverture de faisceau de 18° ;
– en émission, trois couvertures différentes, une couverture globale (18°), une couverture dite eurafricaine (10,5°), et une couverture fine dite Antilles-Guyane (4°).
Durant la PDP, le pinceau fin de 4° est abandonné et la version finale du sous-système antennes comprend :
– un cornet de réception ayant une couverture globale ;
– deux antennes d’émission pratiquement identiques avec une ouverture elliptique de 14,4° x 9,3°, et destinées à couvrir d’une part l’Europe et l’Afrique, jusqu’à Madagascar et la Réunion, et d’autre part l’Amérique du Sud, l’Amérique centrale, dont les Antilles et la Guyane, et la partie orientale de l’Amérique du Nord.
L’étude se déroule sans incident majeur si l’on excepte quelques dérogations obtenues pour des déviations mineures du gain (0,5 dB) en quelques points très restreints de la limite de couverture. C’est au cours d’une discussion mémorable, poursuivie en présence de la Direction du Département jusque vers 2 heures du matin, qu’est décidée et préparée la demande de dérogation.
Les deux antennes d’émission sont identiques, composées chacune d’un cornet rectangulaire illuminant un miroir parabolique de forme approximativement elliptique, le tout fonctionnant à 4 GHz en polarisation circulaire gauche. Le gain est supérieur à 19,5° dans toute la zone de couverture. La fabrication des réflecteurs est sous-traitée à l’Aérospatiale. L’antenne de réception est un cornet conique fonctionnant à 6 GHz en polarisation circulaire droite, avec une ouverture de faisceau de 18° et un gain supérieur à 16 dB en bordure de couverture.
Les répéteurs
L’étude des matériels des répéteurs n’est pas a priori sans poser quelques problèmes. Ceux que Thomson-CSF doit réaliser ne sont pas exactement ceux qu’il a conçus dans sa proposition initiale. En effet, pour des raisons n’ayant que peu de rapport avec la technique, le résultat de la symétrisation a été le choix du schéma de répéteurs proposé par Siemens.
Les répéteurs, d’une bande passante de 90 MHz chacun, doivent fonctionner en bande C (réception à 6 GHz, émission à 4 GHz). Ils sont au nombre de deux, ce qui ne signifie pas une redondance car chacun est réglé sur une fréquence centrale différente. Afin d’avoir un oscillateur local commun, on a utilisé un schéma de double conversion, les fréquences intermédiaires étant choisies afin de permettre l’utilisation d’une seule fréquence d’oscillateur local à la réception, ainsi qu’une seule fréquence à l’émission.
Un autre problème potentiel, interne cette fois, est dû à l’éloignement des équipes chargées respectivement de l’étude (Levallois) et de la réalisation (Vélizy), et au fait que ces équipes, issues de deux sociétés qui viennent juste de fusionner, doivent d’abord apprendre à se connaître et à homogénéiser leurs méthodes de travail.
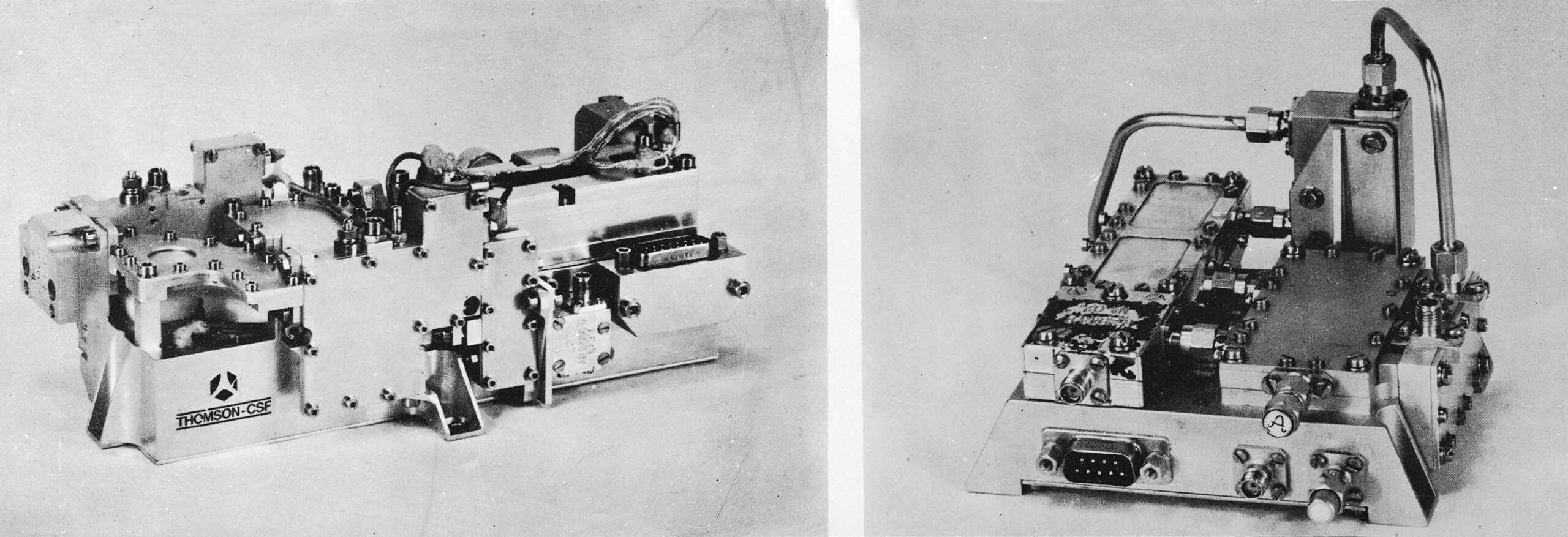
L’oscillateur local de Symphonie et l’amplificateur/mélangeur d’émission
Finalement, malgré, et parfois à l’aide d’explications qu’un langage diplomatique qualifierait de «franches», la séquence études-fabrication-essais se déroule sans incident majeur, aussi bien pour les oscillateurs locaux que pour les mélangeurs d’émission qui représentent la part de Thomson-CSF.
Le problème technique le plus ardu à résoudre est celui de la stabilité de l’oscillateur pilote. Craignant la fiabilité insuffisante des thermostats, il a été décidé de ne pas loger cet oscillateur dans une enceinte thermostatée. Le choix s’est porté sur l’introduction dans les circuits d’un jeu de thermistances aux coefficients de température judicieusement choisis. La difficulté de la mise au point justifie l’intervention personnelle du Directeur Technique de DFH, Philippe Magne, qui consacre quelques longues soirées au problème, finalement résolu avec succès.
L’intégration des répéteurs est exécutée par une équipe mixte Thomson-CSF/Siemens, pour moitié à Munich et pour moitié à Vélizy, toujours pour satisfaire un parfait équilibre franco-allemand. Michel Romain et Robert Hagenbucher participent à ces opérations pour Thomson-CSF.
Il en est de même pour l’intégration des satellites, exécutée pour moitié aux Mureaux (MV1) par une même équipe franco-allemande du groupe de projet du CIFAS. Philippe Gsell et Jean-Pierre Jullien y représentent Thomson-CSF.
Depuis la passation du contrat final, il est devenu évident que l’objectif initial d’avoir au moins l’un des modèles de vol en orbite pour retransmettre les images des Jeux olympiques de Munich en 1972 ne pourra être tenu. Un lancement en 1973 paraît possible. Les prévisions sont le premier et le deuxième trimestres de 1973, respectivement pour chacun des modèles de vol. Mais c’est compter sans les malheurs de la fusée Europa II.
Les lancements
À la fin de 1972, le développement des satellites est pratiquement terminé, mais il manque un senseur infrarouge qui devait initialement être acheté aux États-Unis, mais dont le gouvernement a interdit la livraison en Europe. Il faut donc le faire développer en France par la société Sodern, ce qui prend du temps, et l’intégration du prototype de Symphonie n’est vraiment terminée qu’en novembre 1973.
La fusée Europa II va de défaillance en défaillance dans ses tirs d’essais, et, à la suite de l’échec du premier tir en Guyane, le 5 novembre 1971, et de la décision d’arrêt du programme le 1er mai 1973, il faut rechercher un autre lanceur pour Symphonie. La solution évidente sur le plan technique est la fusée américaine Thor-Delta. Or, dans l’accord créant l’organisation Intelsat, dont la France et l’Allemagne sont membres, il est spécifié qu’aucun des pays membres ne peut utiliser de satellites de télécommunications autres que ceux d’Intelsat à des fins commerciales sans l’autorisation de cette organisation.
Le gouvernement des États-Unis fait état de cette clause pour refuser le lancement par une fusée américaine. Il faudra un an d’âpres discussions pour que ce lancement soit accepté à condition d’utiliser Symphonie à des fins purement expérimentales. Plusieurs mois seront encore nécessaires pour modifier les satellites en vue de les adapter au nouveau lanceur. Enfin, après quelques péripéties dues entre autres à un problème de valve de remplissage sur le lanceur et à un violent orage, qui firent retarder le lancement de vingt-quatre heures, Symphonie A est mis en orbite le 19 décembre 1974 à 21 h 39 (heure locale) à partir du centre de Cap Canaveral. Toutes les opérations suivant le lancement : mise en marche du moteur d’apogée, largage du yo-yo, déploiement des panneaux solaires, mise en marge du système de stabilisation sur trois axes, et dérive jusqu’à la position finale à 11,5° ouest sont couronnées de succès.
Il faut bien admettre que le premier satellite géostationnaire stabilisé sur trois axes est en place, et que le premier moteur d’apogée biliquide a correctement fonctionné. Malgré cela, quelques esprits chagrins expriment des doutes sur la durée de ce succès, estimant qu’il ne s’agit que d’un heureux hasard, l’Europe n’étant pas, pour eux et par définition, capable de reproduire un tel succès. Un incident survenu quelques jours après le lancement sera sur le point de leur donner raison.
La panne de l’oscillateur local
Environ une semaine après le lancement, alors que les répéteurs ont été mis sous tension et que l’on procède sur eux à divers essais, l’oscillateur local qui est en service cesse de fonctionner. Heureusement, cet équipement est redondant (le seul dans les répéteurs) et l’on met en marche le second oscillateur. Lorsqu’on essaye de remettre en marche le premier, il a d’abord un fonctionnement intermittent puis cesse définitivement de fonctionner le 29 décembre. La mission du satellite n’en est nullement affectée, comme nous le verrons plus loin.
Néanmoins, une large publicité est faite à l’incident, qui est, par exemple, relaté dans une revue spécialisée qui y consacre pas moins de huit articles différents parus au cours de l’année 1975.
À Vélizy, on accorde bien entendu une grande importance à cette première panne d’un matériel en orbite fourni par la société.
Le second modèle de vol doit être lancé quelques mois plus tard et il est impensable de procéder à ce lancement avant d’avoir élucidé la cause de la panne et effectué les modifications qui pourraient s’avérer nécessaires.
Les enregistrements des télémesures sont examinés avec la plus grande attention et l’on finit par constater la coïncidence de l’arrêt de l’oscillateur et d’une variation très faible (2 bits) du courant dans le circuit pilote.
Les ingénieurs et techniciens du Service Hyperfréquences entreprennent donc, en utilisant le modèle d’identification de l’oscillateur, de simuler toutes les pannes possibles en cherchant laquelle ou lesquelles sont à l’origine de cette variation de courant. Ils sont assez heureux pour constater qu’une seule panne provoque ce phénomène d’une manière suffisamment reproductible. C’est la coupure d’un certain sensistor, utilisé pour la stabilisation de la fréquence en fonction de la température, qui est la cause la plus probable, bien qu’il soit impossible d’en avoir la parfaite certitude.
Il faut maintenant déterminer pourquoi ce sensistor s’est «coupé». Il reste une quantité suffisante de sensistors du même lot pour que l’on puisse faire subir à un échantillonnage d’entre eux un maximum «d’outrages» conformes aux essais de qualification : vibrations, cycles thermiques, vieillissement accéléré. Après plusieurs mois, aucun défaut systématique n’ayant pu être découvert, on en déduit que la panne constituait un phénomène strictement aléatoire, et il est décidé, tout en renforçant les contrôles sur ce type de composant, de n’effectuer aucune modification sur les oscillateurs locaux destinés au second modèle de vol.
Cette décision est certainement bonne puisque aussi bien les oscillateurs de Symphonie B que le «survivant» de Symphonie A fonctionneront sans aucune défaillance pendant environ neuf ans chacun, jusqu’au moment où il sera décidé de faire quitter aux satellites l’orbite géostationnaire et d’interrompre le fonctionnement des répéteurs.
Les utilisations de Symphonie
Il n’est pas dans notre propos de décrire en détail les nombreuses utilisations de ces satellites expérimentaux. Après le lancement de Symphonie A, la première transmission de signaux de télévision a lieu à l’occasion du sommet franco-allemand célébrant, le 22 janvier 1975, le douzième anniversaire de l’accord franco-allemand de 1963 où le président français Valéry Giscard d’Estaing et le chancelier allemand Helmut Schmidt ont eu un entretien télévisé via Symphonie.
Outre la France et l’Allemagne, de nombreux pays sont demandeurs de l’utilisation de Symphonie, en particulier pour des expériences de télévision éducative. Symphonie B, lancé le 26 août 1975, vient renforcer le potentiel d’utilisation que mettent à profit, notamment, l’Inde, la Chine et divers pays africains.
Des essais de transmissions de données ont également lieu par-dessus l’océan Atlantique. Au bout de cinq à six ans pour chacun des satellites, on limite l’utilisation du peu d’ergols qui restent dans les réservoirs au contrôle d’attitude aux dépens du maintien en position, ce qui permet de continuer d’accomplir des missions partiellement dégradées.
Enfin, comme il a été dit, quand les ergols sont très proches de l’épuisement, leur reliquat est utilisé, après environ neuf ans de vie, pour éjecter ces satellites de l’orbite géostationnaire, opération réalisée pour la première fois au monde afin de laisser la place aux successeurs sur une orbite dont l’encombrement ne fait que croître.
Les décharges électrostatiques
Sur le plan purement technique, Symphonie est l’un des premiers satellites géostationnaires où se manifeste un phénomène qui fera couler beaucoup d’encre avant d’être finalement élucidé.
Quelque temps après la mise en marche de tous les équipements du satellite, il apparaît que, presque tous les jours et au même moment de la journée, un ordre de télécommande intempestif fait basculer le fonctionnement d’un convertisseur d’alimentation sur le convertisseur de secours. Bien que l’incident soit, en apparence, mineur, car il suffit d’envoyer l’ordre de télécommande inverse pour tout remettre en ordre, le fait qu’il se reproduise à peu près systématiquement est considéré comme inquiétant.
Ce n’est que quelques mois plus tard qu’un début d’explication est trouvé dans la littérature scientifique américaine. Il s’agit très vraisemblablement de «claquages» périodiques du condensateur formé par les couches de mylar aluminisé qui constituent la «superisolation» thermique du satellite. Ce condensateur est chargé progressivement par des particules ionisantes émises par le soleil et un claquage se produit à partir d’une certaine tension de charge. Le signal de haut niveau induit dans le circuit de télécommande provoque l’ordre intempestif. Un projet de satellite américain est en préparation pour étudier le phénomène. Pour Symphonie, lorsque les claquages successifs ont provoqué suffisamment de courts-circuits entre les couches métalliques, les ordres intempestifs finissent par disparaître. Bien entendu, ce problème sera pris en compte dans les programmes de satellites suivants et on veillera à ce que le condensateur créé par la superisolation soit court-circuité au départ.
Les primes
Après l’achèvement du programme, les sociétés membres du consortium CIFAS décident, d’un commun accord, de distribuer une prime à tous les membres de leur personnel y ayant participé. Cette prime est un témoignage de la bonne gestion du projet, malgré les multiples difficultés qui ont retardé son achèvement.
Les satellites de télécommunications de l’ESA: OTS, MAROTS, ECS
OTS
À partir de 1970, l’ESRO, dont la mission initiale est limitée au domaine des satellites scientifiques, examine la possibilité de promouvoir les techniques et les technologies européennes dans le domaine des satellites d’applications.
Parallèlement, l’association des industriels européens, Eurospace, a créé un groupe de travail, présidé par Jacques Chaumeron, qui y représente Thomson-CSF, et chargé de la promotion des applications des satellites dans le domaine des télécommunications et de la télévision.
Après un certain nombre de discussions, l’ESRO réussit à faire adopter par le Conseil des ministres des pays membres le principe de programmes de satellites d’applications dits «à la carte», ce qui signifie que seuls les pays volontaires participeront à leur financement, le «juste retour» pour l’attribution des marchés à l’industrie étant défini en conséquence.
Dès juillet 1970, cinq MUC (Millions d’Unités de Compte) ont été engagés par l’ESRO pour des études préliminaires de définition d’un futur satellite européen de télécommunications. À ce titre, de décembre 1970 à janvier 1971, divers marchés sont passés à l’industrie.
Les consortiums Cosmos, MESH et STAR, menés respectivement par Aérospatiale, Hawker Siddeley et British Aircraft, reçoivent chacun un marché portant sur le satellite. AEG-Telefunken et Siemens se voient confier, chacun, une étude de répéteur modulaire en bande Ku pour le satellite. Enfin, AEG-Telefunken et Thomson-CSF (Division Tubes Électroniques) reçoivent, chacun également, un marché pour la réalisation d’une maquette d’ATOP en bande Ku.
Au cours de l’année 1971, l’ESRO continue ses propres études en comparant en particulier les mérites de diverses options quant à la forme que pourrait revêtir le premier satellite expérimental.
Une solution économique pourrait être l’utilisation de Symphonie B mais ce dernier opère en bande C. Une autre solution utiliserait un satellite britannique en cours de définition et baptisé GTS. La troisième solution est évidemment un satellite entièrement nouveau, opérant en bande Ku, baptisé OTS (Orbital Test Satellite).
Entre-temps, une décision du Conseil, datée du 20 décembre 1971, a précisé que ces programmes d’applications, qui doivent être menés simultanément, concerneront l’aéronautique, la météorologie et les télécommunications.
Dans le domaine aéronautique, la vie et la mort du programme Aerosat, à la préparation duquel le Département ESA (puis DSP) participe pendant plusieurs années, sont relatées dans un chapitre qui lui est entièrement consacré.
Dans le domaine météorologique, le premier programme Meteosat est gagné par le consortium Cosmos, où le maître d’œuvre est l’Aérospatiale, et de ce fait le Département ESA, qui appartient au consortium STAR, ne peut y participer.
Dans le domaine des télécommunications, ce n’est que vers la fin de 1972 qu’est décidé le principe d’un satellite expérimental et préopérationnel baptisé OTS.
Dans les études de définition préliminaires, outre l’étude de l’ATOP, Thomson-CSF participe à l’étude d’un récepteur et des OMUX faisant partie du répéteur modulaire sous la maîtrise d’œuvre d’AEG-Telefunken. Conformément au projet d’accord qui est alors en cours de négociations entre la Division AVS – dont fait partie le Département ESA – et la Division DFH, c’est cette dernière qui prend l’étude en charge.
Fin 1972, l’ESRO passe aux industriels les premiers marchés de phase A pour l’ensemble du satellite OTS, les répéteurs et les antennes, se réservant le contrôle direct des études concernant ces deux derniers sous-ensembles, sans passer par l’intermédiaire du maître d’œuvre du satellite. À Thomson-CSF, les avis divergent quelque peu sur la stratégie à adopter.
Au Bureau des Activités Spatiales du siège, on voit les choses en grand : le maître d’œuvre d’un programme de satellite de télécommunications ne peut être qu’une société d’électronique compétente en matériels de télécommunications, telle que Thomson-CSF. À la Division AVS et au Département ESA, on voit les choses d’une manière beaucoup plus terre à terre : le Département ESA a été constitué récemment et il ne possède ni la compétence ni l’expérience pour avoir une chance, à l’époque, de battre dans une compétition les nombreux candidats déjà expérimentés à la maîtrise d’œuvre de satellites. On peut en dénombrer au moins sept en Europe. De plus, étant donné le faible nombre de programmes de satellites prévus en Europe dans les dix années à venir, comment peut-on alimenter d’une manière continue une équipe de maîtrise d’œuvre, pendant cette période, compte tenu de la règle du «juste retour» en vigueur à l’ESA, seul client valable pour encore plusieurs années ? Sans perdre l’espoir d’acquérir progressivement les compétences en maîtrise d’œuvre de satellites, mieux vaut, pour l’instant, se contenter par exemple de celle des répéteurs ou des antennes, pour laquelle les compétences existent à Thomson-CSF.
Dans une première phase, Vladimir Altovsky, Directeur du Bureau des Activités Spatiales, a obtenu, afin que Thomson-CSF conserve ses chances d’obtenir la maîtrise d’œuvre du satellite, que celle des répéteurs soit «abandonnée» à AEG-Telefunken, qui a sauté sur l’occasion de l’obtenir pratiquement sans concurrence. Il reste ensuite à se faire accepter comme maître d’œuvre du satellite dans la proposition que doit préparer le consortium STAR, auquel Thomson-CSF est lié pour tous les programmes de satellites de l’ESA. C’est oublier que ce consortium comprend déjà deux candidats maîtres d’œuvre ayant déjà au moins une expérience de ce genre à leur actif : British Aircraft (BAC) et Dornier.
Au moment de choisir, au sein du consortium, celui des trois candidats qui en défendra les couleurs dans la phase B, Thomson-CSF se trouve en minorité et c’est BAC qui l’emporte.
Le 28 août 1972, une démarche est tentée par Vladimir Altovsky, accompagné de Jacques Chaumeron, pour tenter de récupérer, auprès d’AEG-Telefunken, la maîtrise d’œuvre des répéteurs mais, comme il fallait s’y attendre, cette démarche échoue et Thomson-CSF doit se contenter d’être, dans ces mêmes répéteurs, sous-traitant d’AEG-Telefunken, pour les récepteurs et les filtres multiplexeurs de sortie (OMUX), la Division Tubes de Thomson-CSF fournissant pour sa part les tubes à ondes progressives à 11 GHz.
Une tentative du Bureau des Activités Spatiales de faire créer une maîtrise d’œuvre intermédiaire, celle de la charge utile, coiffant les répéteurs et les antennes, n’est pas retenue par l’ESRO.
À partir de ce moment, l’action du Département ESA se manifeste dans deux directions :
– le sous-système télémesure-télécommande (TM-TC) ;
– les matériels de répéteurs.
Pour la maîtrise d’œuvre du satellite, la phase B se déroule durant l’année 1973. À la suite d’un appel d’offres émis le 15 janvier 1973, deux consortiums y sont admis à partir du 11 avril : STAR, dont le maître d’œuvre est BAC, et MESH, dont le maître d’œuvre est Hawker Siddeley Dynamics (HSD), c’est-à-dire en fait deux maîtres d’œuvre britanniques.
Au cours de cette phase B, et comme à l’habitude dans le consortium STAR, le Département ESA fournit à BAC les éléments nécessaires à l’avant-projet de satellite pour le sous-système TM-TC.
À la fin de la phase B, qui se termine en septembre 1973, le travail s’intensifie au Service ES et au Service Commercial du Département pour la préparation de la proposition de phase C/D, où le Département ESA doit être responsable du sous-système TM-TC. L’établissement des prix donne lieu inévitablement à des discussions «animées» dans plusieurs réunions du consortium.
Les propositions sont remises à l’ESRO par BAC et HSD. Au début de novembre 1973, l’ESTEC, établissement technique de l’ESRO, remet son rapport d’évaluation qui place BAC et le consortium STAR en tête, et recommande que le marché des phases C/D leur soit attribué. Un obstacle important reste à franchir pour l’attribution définitive, celui du Comité administratif et financier (AFC) de l’ESRO, constitué de délégués de chacun des pays membres qui doivent procéder à un vote.
D’après les informations réunies par Pierre Gautier, chef du Service Commercial du Département ESA, la voix du délégué français peut faire pencher la balance d’un côté ou de l’autre. Il y a donc lieu d’intensifier la «campagne électorale» car MATRA, membre français du consortium concurrent MESH, dispose d’une influence qu’il convient de ne pas négliger.
Dans un programme de satellite de télécommunications comme OTS, deux ministères ont leur mot à dire dans les instructions de vote à donner au délégué français : le ministère des PTT et le ministère de la Recherche, qui a la tutelle du CNES.
Thomson-CSF est mieux placé auprès du ministère des PTT alors que MATRA a plutôt l’oreille de celui de la Recherche.
Malgré les assurances données aux représentants de la haute Direction de Thomson-CSF par ceux du ministère des PTT, les instructions du ministère de la Recherche de voter en faveur de MATRA l’emportent et, le 29 novembre 1973, le consortium MESH est choisi avec une voix d’avance.
À Thomson-CSF, la perte du programme OTS par le consortium STAR, à la suite d’un vote politique et en dépit d’un rapport d’évaluation favorable, provoque une déception considérable.
Le consortium MESH se voit établi auprès de l’ESRO dans une position dominante qui, au-delà des deux modèles d’OTS, se maintiendra dans la génération suivante des ECS et ne sera interrompue que lorsque l’organisation Eutelsat, qui prendra la relève de l’ESRO pour les satellites opérationnels, fera à nouveau appel à la concurrence.
Malgré cette déconvenue, le Département ESA doit toujours fournir, avec l’aide de la Division DFH, les récepteurs (six modèles de vol par satellite) et les OMUX en bande Ku.
L’étude des récepteurs, exécutée à DFH, permet de qualifier pour l’usage spatial une technologie de microélectronique en couches minces sur substrat en céramique qui est déjà en cours d’étude pour les faisceaux hertziens. Afin d’éviter une duplication des dépenses, l’ESRO apporte un financement pour l’étude et la qualification de cette technologie à AEG-Telefunken, maître d’œuvre des répéteurs, sous la condition que cette société effectue, dans le cadre de son marché, un transfert vers Thomson-CSF. Après quelques péripéties inévitables dans ce genre d’opération où il faut résoudre un certain nombre de malentendus causés par des différences d’interprétation des spécifications, le procédé de fabrication des circuits par évaporation sous vide obtient sa qualification spatiale.
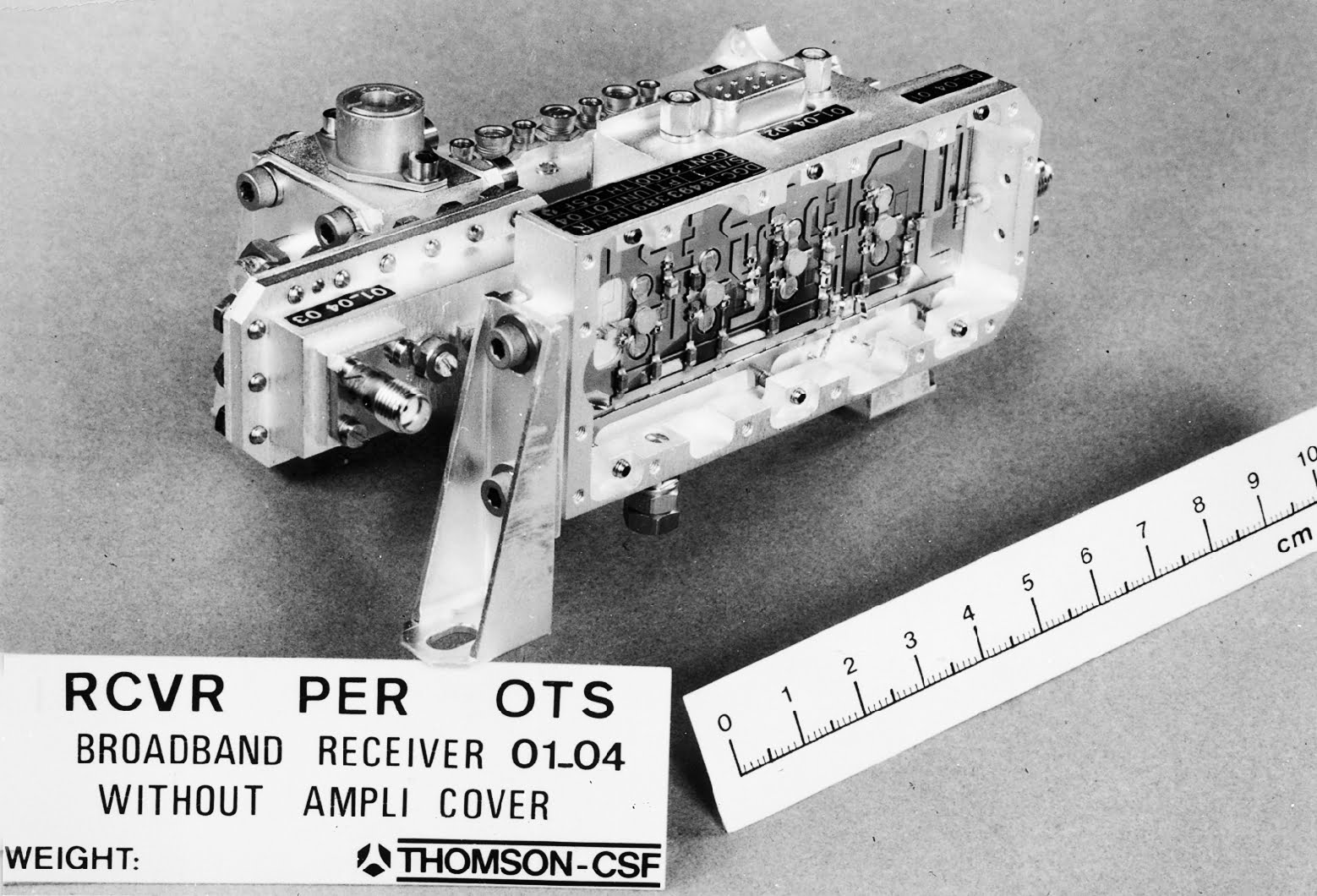
Récepteur en bande Ku du satellite OTS
Les principaux acteurs en ont été Jean-Pierre Chenu, alors responsable, avec Jean Fouillet, de la microélectronique hyperfréquences à DFH, et Guy Bertaud qui, au titre de chef du projet OTS au Département ESA, doit assurer la conformité du procédé avec les règles de la qualité spatiale.
Après les études de maquettes réalisées dans les laboratoires de DFH où Alain de Place puis Pierre de Bayser sont successivement responsables de l’étude, les modèles suivants des récepteurs sont réalisés et mis au point au Département ESA par le Service Hyperfréquences (HY) dirigé par Marcel Palazo. C’est bien entendu le Service de Fabrication du Département qui procède à l’assemblage des circuits.
Pour les OMUX, qui sont réalisés en invar avec une première tentative d’amincir les parois pour réduire le poids, les études de maquettes sont effectuées à DFH, notamment par Pierre de Bayser et Pierre Fraise puis, comme pour les récepteurs, c’est le Département ESA qui prend en charge la fabrication et les essais des modèles suivants jusqu’aux modèles de vol.
Ces deux matériels marquent le début de lignes de produits qui, tout en évoluant en fonction des progrès techniques et technologiques, constitueront l’un des principaux atouts des unités successives qui donneront naissance à Alcatel Espace.
Les antennes d’OTS ont fait l’objet d’une proposition à l’ESRO, préparée par la section antennes du Service HY, dirigée par Bruno Vidal Saint-André. Cette proposition n’est malheureusement pas retenue, en grande partie pour des raisons de juste retour. L’Italie réclame une part importante du programme OTS, ce qui justifie l’attribution de la responsabilité des antennes à la société italienne Selenia.
Après la fourniture des modèles d’identification et de qualification, les livraisons des modèles de vol des récepteurs (deux par satellite) et des OMUX (un par satellite) sont effectuées en 1976, successivement pour chacun des deux satellites.
Le lancement du premier satellite, OTS I, tenté le 13 septembre 1977, se termine prématurément au bout de 54 secondes, à cause d’un défaut de fonctionnement de l’un des propulseurs auxiliaires à poudre de la fusée Delta 3914. Une partie des équipements du satellite est récupérée dans l’océan à proximité de Cap Canaveral.
Le second lancement, effectué le 11 mai 1978, est un succès et le satellite OTS II accomplit normalement sa mission, ce qui permettra au Département DSP d’encaisser des primes de vol pendant quelques années.
MAROTS et MARECS
Dès 1966, des études sur l’utilisation des satellites dans le domaine maritime ont été entreprises au sein de l’IMCO (Intergovernmental Maritime Consultative Organization). Ces études, qui portent non seulement sur l’évaluation des besoins opérationnels et des caractéristiques à demander au système satellitaire mais aussi sur les aspects économiques et institutionnels, aboutissent, en septembre 1976, à la mise sur pied d’une organisation internationale chargée de mettre en place et d’exploiter un tel système. C’est la naissance d’Inmarsat qui aura une existence légale à dater du 16 juillet 1979.
Parallèlement à ces études, un consortium américain, dirigé par Comsat, entreprend, à partir de 1973, de construire deux satellites à usage de télécommunications maritimes. Le système Marisat, constitué de ces deux satellites fabriqués par Hughes, entre en service au-dessus des océans Atlantique et Pacifique au milieu de l’année 1976. Un troisième satellite est lancé en 1978 pour desservir l’océan Indien, complétant ainsi la couverture globale de l’ensemble du système.
Du côté européen, l’ESRO ne reste pas inactive. Dans la foulée des études préparatoires au programme OTS, on examine comment on pourrait dériver du satellite OTS un satellite dédié aux télécommunications maritimes. Pour les liaisons avec la terre, le choix est à faire entre la bande C et la bande Ku. Les matériels fonctionnant dans cette dernière bande ont fait l’objet d’études financées par l’ESRO qui ont donné une certaine avance aux industriels européens dont Thomson-CSF fait partie.
Pour les liaisons entre les satellites et les bateaux, les bandes de fréquences qui ont fait l’objet d’attributions sont la bande S (1 636,5-1 644 MHz) pour les liaisons montantes (des bateaux vers le satellite) et la bande L (1 535-1 542 MHz) pour les liaisons descendantes.
Au milieu de l’année 1973, l’ESRO est prête à lancer la phase A, c’est-à-dire la phase de définition préliminaire d’un satellite maritime qui s’appellera MAROTS.
C’est l’époque où l’Europe spatiale est en crise. Les échecs répétés du lanceur Europa ont conduit la France, sous l’impulsion du CNES et de l’Aérospatiale, à proposer le développement d’un lanceur entièrement nouveau, le L IIIS, qui deviendra Ariane.
L’Allemagne, de son côté, souhaite faire porter les principaux efforts vers les vols habités, en coopération avec les États-Unis, et met en avant le développement du Spacelab, laboratoire qui doit être embarqué à bord de la navette spatiale (Space Shuttle).
Le Royaume-Uni, suivant la tradition maritime britannique, a des ambitions relativement plus modestes en dirigeant la promotion d’un programme de satellites de télécommunications maritimes, et donc de MAROTS.
Le financement de l’ensemble de ces programmes d’application, qui s’ajoutent au programme scientifique dit «obligatoire» de l’ESRO, pose de très graves problèmes. Une conférence au niveau des ministres des pays membres est organisée le 12 juillet 1973 afin de définir le programme des années à venir. Elle devient rapidement orageuse et, afin d’éviter une rupture, est finalement suspendue. Son président, le ministre belge Charles Hanin, se charge d’une mission de «bons offices» entre les principaux interlocuteurs. Cette mission se prolongera pendant une quinzaine de jours, et le 31 juillet, la conférence à nouveau réunie se met d’accord sur un «package deal» qui fera date dans l’histoire de l’espace européen. Elle décide également de la date à laquelle la nouvelle agence, l’ESA, entrera en fonctionnement : le 1er avril 1974.
Les trois programmes sont approuvés, chacun des pays qui les a proposés assurant une contribution majeure au financement. Pour le nouveau lanceur, la France assure le financement à 62,50 %. Pour Spacelab, la contribution allemande est de 52,55 %, et pour MAROTS la part du Royaume-Uni s’élève à 56 %.
C’est ainsi que naît le programme MAROTS. Pour la maîtrise d’œuvre du satellite lui-même, il est évident que Hawker Siddeley, société britannique déjà maître d’œuvre d’OTS, n’a aucun concurrent possible, tant pour des raisons industrielles que pour des raisons de «juste retour».
Pour la charge utile, la maîtrise d’œuvre est à peu près automatiquement attribuée à la société britannique MSDS (Marconi Space and Defense Systems).
Les contrats de phase A sont rapidement attribués à ces deux sociétés. Ils se terminent fin 1973. Les phases B sont exécutées pendant le premier semestre de 1974, aboutissant à des propositions pour la phase C/D.
Après les négociations d’usage, les contrats de phase C/D sont attribués, fin novembre 1974, à Hawker Siddeley pour un montant de 17,3 MUC, et à Marconi pour un montant de 21,1 MUC.
Le Département DSP dans MAROTS et MARECS
Dès que les caractéristiques prévisibles de la charge utile de MAROTS sont connues, et en particulier les bandes de fréquences dans lesquelles elle fonctionnera, la Direction du Département Espace-Satellites (dont le nom sera changé de ESA en DSP fin 1974) tente de déterminer quels matériels pourraient être offerts dans ce programme avec quelques chances de succès.
Les récepteurs en bande Ku, déjà étudiés pour OTS, peuvent, avec d’éventuelles modifications certainement peu importantes, être utilisés pour MAROTS. C’est effectivement le cas, et ces récepteurs sont retenus par le maître d’œuvre Marconi.
Un autre point d’intérêt pour le Département ESA est un développement entièrement nouveau : un amplificateur de puissance (50 watts) en bande L à l’état solide. Le Service HY, dirigé par Marcel Palazo, se met au travail en concevant pour cet amplificateur une structure modulaire permettant d’obtenir la puissance requise en mettant en parallèle, avec des dispositifs de couplage adéquats, les transistors qui commencent à être disponibles sur le marché.
La réalisation d’une maquette est très avancée lorsque, au moment d’établir la proposition pour la phase C/D, le maître d’œuvre Marconi fait savoir qu’il se réserve la fourniture de l’amplificateur de puissance. Thomson-CSF doit, par conséquent, y renoncer. Il serait très difficile de contester la décision car, d’une part, la contribution française au financement du programme est relativement modeste et, d’autre part, elle est presque entièrement absorbée par la participation de MATRA à la construction de la plate-forme dérivée d’OTS. Il faut donc se contenter de la fourniture des récepteurs en bande Ku.
La première maquette, réalisée sous la direction du Service HY, est livrée à Marconi durant le troisième trimestre de 1975. Les modèles d’identification seront livrés près d’un an plus tard pour une intégration du modèle d’identification de la charge utile, prévue pour commencer en octobre 1976. La fabrication des modèles de vol des récepteurs débutera vers la fin de 1976.
Pendant ce temps, les pourparlers continuent au niveau international afin de matérialiser l’existence d’Inmarsat. Les ministres des pays membres de l’ESA, qui a pris la suite de l’ESRO au milieu de 1974, approuvent, en février 1977, la mise en fabrication d’un second modèle de vol de MAROTS.
Dès la moitié de 1977, il apparaît que pour homogénéiser un futur système mondial, les liaisons entre les satellites et les stations terriennes devront être effectuées en bande C, au lieu de la bande Ku qui a été prévue pour MAROTS.
La décision finale du passage à la bande C est prise au début de 1978 par le Conseil directeur des programmes de télécommunications. Les industriels sont autorisés à travailler sur les nouvelles fréquences à partir de février 1978.
Le programme change alors de nom pour être appelé MARECS. Il ne s’agit plus de satellites expérimentaux : ils doivent être opérationnels dans le cadre du système mondial.
Au Département DSP, le Service HY doit reprendre l’étude des récepteurs pour les adapter aux nouvelles fréquences.
Comme à l’habitude avec les marchés de l’ESA, les premiers mois de travail sont financés par LOL (Limit Of Liability), car le premier contrat avec le maître d’œuvre pour les deux premiers satellites MARECS, d’abord prévu pour octobre 1978, n’est effectivement signé qu’au début de 1979. Le sous-contrat attribué à Thomson-CSF pour les récepteurs arrive quelques semaines plus tard.
Les propositions faites par l’ESA au «joint-venture» qui deviendra Inmarsat portent sur un total de quatre satellites MARECS, dont trois opérationnels et un satellite de rechange. En raison de problèmes internes aux États-Unis où, entre autres, le débat devant aboutir à la désignation de l’entité (Comsat ou le consortium Marisat) qui représentera ce pays à Inmarsat se prolonge, la décision sur la configuration initiale du système mondial tarde à venir.
Néanmoins, en juillet 1979, au moment où Inmarsat finit par entrer en existence (le 16 juillet), l’ESA décide de préfinancer un troisième modèle de vol de MARECS.
L’étude et la fabrication des récepteurs pour les trois satellites se déroulent dans des conditions relativement bonnes. Seul un problème technologique avec des substrats de microélectronique, survenu en novembre 1979, provoque quelques inquiétudes, mais il est rapidement résolu.
Sous les ordres des chefs successifs du Service HY, Marcel Palazo, jusqu’en octobre 1979, puis de Pierre de Bayser, qui lui succède, le principal responsable du développement, du suivi de la fabrication et des essais est André Arbonel, avec J.-L. Peysson comme ingénieur de qualité. Les livraisons des différents modèles de vol des récepteurs s’échelonneront au cours de l’année 1980.
Le premier satellite, MARECS I, est mis en orbite le 20 décembre 1981. Malgré quelques problèmes de décharges électrostatiques qui perturbent son contrôle d’attitude, il accomplit correctement sa mission pour Inmarsat, qui l’a mis en service opérationnel le 1er mai 1983.
Le lancement de MARECS II est un échec pour le lanceur Ariane le 9 septembre 1982.
Avant la mise en orbite du troisième modèle, Marconi renvoie à DSP le récepteur qui, à la suite d’un long stockage, doit subir une vérification complète. Ce travail est effectué dans les derniers mois de 1982, et le récepteur est livré à nouveau à Marconi le 29 décembre 1982.
Le satellite MARECS II B est mis en orbite presque un an plus tard, le 9 novembre 1984.
ECS
Dès les premières réflexions qui déboucheront sur la mise en place du programme expérimental OTS, l’ESRO a pour intention d’aboutir à un système européen opérationnel de télécommunications par satellites qui doit entrer en service à partir de 1980.
Outre les problèmes techniques habituels, la mise en place d’un tel système, dédié aux services fixes, rencontrera des problèmes réglementaires.
Les futurs utilisateurs du système, c’est-à-dire les administrations des Postes et Télécommunications d’un certain nombre de pays européens, groupées au sein de la CEPT (Commission Européenne des Postes et Télécommunications), travaillent en liaison constante avec l’ESRO (puis l’ESA) aux définitions préliminaires du système. Une synthèse des différents avis est relativement facile à obtenir.
La principale difficulté viendra de l’organisation mondiale Intelsat, dont font partie tous les pays membres de la CEPT. La charte d’Intelsat, qui a mis sur pied un système mondial de télécommunications par satellites, précise que tout pays ou groupe de pays désirant mettre en place un système régional doit au préalable apporter la preuve que ce système ne nuira pas aux intérêts d’Intelsat.
Il est essentiel, pour les pays européens, de ne pas renouveler l’expérience du programme Symphonie pour lequel les États-Unis, membre prépondérant au sein d’Intelsat, n’ont autorisé le lancement des satellites Symphonie par des lanceurs Delta qu’à la condition que ces satellites n’aient aucune utilisation commerciale.
Il s’ensuit, avant que le principe d’un système européen opérationnel ne soit adopté, une longue série de négociations entre la CEPT et l’ESRO d’une part et la Comsat, qui représente les autorités américaines au sein d’Intelsat. Les représentants de l’Administration française au sein de la CEPT y jouent un rôle essentiel.
En février 1977, le conseil de l’ESA est en mesure d’approuver le principe d’un programme opérationnel.
Les maîtrises d’œuvre pour la réalisation des satellites et de leurs charges utiles doivent logiquement revenir aux industriels qui en ont eu la charge dans le programme OTS. Ces industriels, HSD pour les satellites, et AEG-Telefunken pour les charges utiles, ont exécuté préalablement des études de définition d’ECS qui ont largement utilisé l’expérience acquise avec OTS.
La charge utile d’un satellite ECS doit comprendre douze canaux de répéteurs entièrement redondants, dont au moins neuf doivent pouvoir être alimentés simultanément en dehors des périodes d’éclipse.
Initialement, il a été prévu que six canaux auraient une largeur de bande de 120 MHz et les six autres une largeur de 40 MHz. Finalement, la solution adoptée est celle d’une même largeur de bande de 80 MHz.
Le démarrage de la phase C/D est approuvé en juillet 1977 avec un financement provisoire s’étendant jusqu’en novembre de la même année.
Des prolongations successives de deux mois chacune sont accordées jusqu’à la signature, puis la mise en vigueur, le 14 septembre 1978, de l’accord entre l’ESA et son «client», l’organisation «Eutelsat intérimaire», qui vient d’être créée par les pays membres de la CEPT. Ce n’est qu’à la fin de 1978 que les négociations entre l’ESA et les maîtres d’œuvre aboutissent à la signature des contrats de phases C/D pour les deux premiers satellites.
Les activités ECS au Département DSP
Thomson-CSF et le Département DSP n’ayant pas démérité dans le programme OTS, il est logique que la réalisation des récepteurs en bande Ku et des OMUX leur soit confiée, et ce sera le cas.
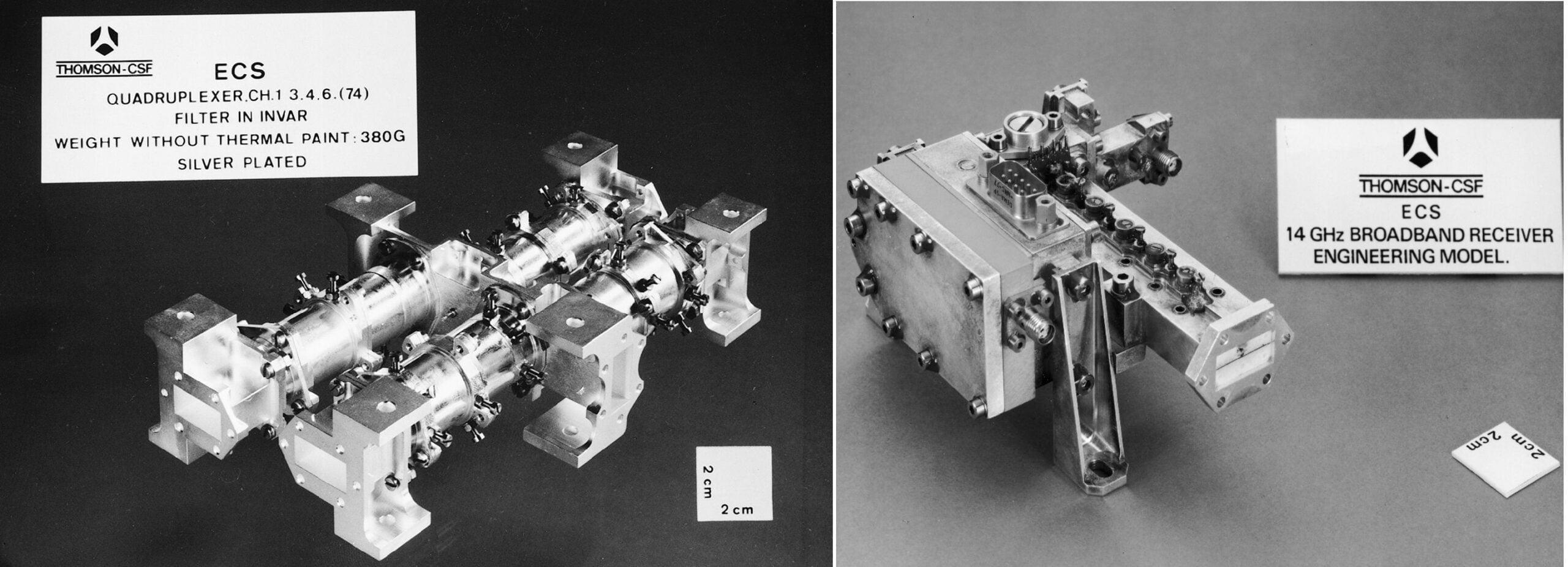
ECS – Multiplexeur de sortie en bande Ku à 11 GHz, technologie Invar — Récepteur en bande Ku à 14 GHz
Si les récepteurs restent assez voisins de ceux d’OTS, en bénéficiant cependant de quelques progrès techniques et technologiques, l’ensemble des OMUX est beaucoup plus complexe en raison du nombre de canaux et du schéma de redondances. C’est l’occasion, en liaison avec la Division DFH, de perfectionner la technologie de l’invar mince.
Ayant commencé en 1978, après que la définition de la charge utile a été établie par le maître d’œuvre, les travaux d’étude sont exécutés sous la direction de Marcel Palazo, puis de Pierre de Bayser à partir d’octobre 1979.
C’est en juillet 1979 qu’à la suite d’une CDR (Critical Design Review), la mise en chantier du premier modèle de vol (protoflight) a été autorisée.
Les premières livraisons des récepteurs et des OMUX sont effectuées au cours de l’année 1980. Les essais du premier modèle de vol de la charge utile chez le maître d’œuvre AEG se terminent en février 1981 et le satellite est lancé avec succès le 16 juin 1983.
Les travaux se poursuivent pour ECS 2, qui est lancé l’année suivante, le 4 août 1984, sur la même fusée Ariane que le premier modèle de Telecom 1.
Alors que les OTS ont été lancés par des lanceurs américains Delta, les ECS sont mis en orbite par Ariane, ce qui a nécessité quelques adaptations par rapport à la conception de base de la plate-forme d’OTS.
La suite du programme
Le 15 mai 1979, l’ESA a signé l’accord final sur le segment spatial d’ECS avec l’organisation Eutelsat, finalement constituée et faisant suite à «Eutelsat intérimaire».
Les négociations se poursuivent pour la fourniture par l’ESA de trois modèles de vol supplémentaires, portant le total à cinq. L’avenant au contrat avec le maître d’œuvre, pour ce prolongement du programme, est signé en juillet 1980.
C’est ainsi que le Service HY doit poursuivre sa tâche. Pierre Fraise y remplace Pierre de Bayser en octobre 1981. Le suivi détaillé des travaux est assuré par André Arbonel qui reçoit en particulier, pour les compléments d’études et les essais, le renfort de Daniel Parise, qui vient de terminer le programme TDRSS.
Les livraisons de DSP s’échelonneront entre 1981 et 1982 sans incident notable. Les trois derniers satellites seront lancés quelques années plus tard.
Le lancement d’ECS 3 est un échec le 12 septembre 1985. ECS 4 et 5 sont mis en orbite respectivement le 16 septembre 1987 (15 septembre à l’heure de Kourou) et le 21 juillet 1988.
C’est la fin du programme de satellites opérationnels piloté par l’ESA. Les programmes suivants seront et continuent d’être pris en charge par l’organisation Eutelsat elle-même.
Les satellites de télécommunications : D’Intelsat II à Intelsat VI, les relations avec Hughes et Lockheed
Les premiers satellites géostationnaires
Les relations entre Thomson et Hughes Aircraft débutent bien avant l’ère spatiale, à l’occasion de programmes militaires.
Lorsque des représentants de Hughes, à l’occasion du Salon du Bourget de juin 1961, font à la tour Eiffel une présentation de leur projet de satellite de télécommunications géostationnaire expérimental Syncom, qui sera financé par la NASA à partir de fin 1961, Pierre Chavance et Pierre Deman, respectivement Directeur et Directeur Technique du Département Télécommunications de Thomson, sont séduits par cette approche du problème.
Il leur faut, à cette époque, un certain courage pour faire connaître leur position, car la doctrine officielle de l’Administration de tutelle dans ce domaine est en faveur des satellites à défilement et exprime de sérieux doutes sur l’avenir opérationnel des satellites géostationnaires.
Sous l’impulsion de Pierre Chavance, les relations entre Thomson et Hughes se nouent progressivement, à partir de 1963, en particulier avec Fred Adler, Directeur de la «Space Systems Division», et son ingénieur en chef Harold Rosen, ardent promoteur du programme Syncom. Jacques Chaumeron, alors au Bureau des Activités Spatiales, participe aux premiers contacts qui seront suivis d’autres auxquels prendront part Pierre Deman, Pierre Gautier et Claude Michaud.
Après les succès des Syncom, la Comsat, organisation gouvernementale américaine nouvellement créée, commande à Hughes le premier satellite expérimental opérationnel baptisé Early Bird, qui est lancé le 6 avril 1965.
Intelsat II
Entre-temps, l’organisation internationale Intelsat a été créée. Son accord préliminaire de constitution, signé par onze pays, dont la France, est entré en vigueur le 20 août 1964. Intelsat décide, dès son entrée en fonctionnement, de commander quatre satellites géostationnaires destinés à créer l’embryon de son réseau mondial.
C’est à Hughes Aircraft, dont l’avance technique est évidente, qu’est tout naturellement attribué le marché.
Les pays membres d’Intelsat, qui possèdent déjà une industrie spatiale naissante, demandent que les satellites, baptisés Intelsat II, ne soient pas exclusivement de fabrication américaine. C’est là que Jean Voge, membre de la délégation française désignée par l’administration des PTT auprès d’Intelsat, a une action déterminante.
Hughes est invité à sous-traiter une partie de la fabrication des satellites dans divers pays membres. Thomson, grâce à ses relations anciennes avec Hughes, se trouve bien placée pour obtenir la part française de la sous-traitance.
Ne souhaitant pas prendre trop de risques, Hughes se borne à sous-traiter des fabrications sur plans de matériels dont il a fait lui-même l’étude.
Thomson est chargée de la fabrication sur plans, de la mise au point et des essais des émetteurs de télémesure VHF du premier et du troisième satellites : les Intelsat IIA et IIC.
Ce travail est effectué à Gennevilliers par le Service NF dirigé par Roland Gosmand, l’ingénieur responsable étant Jean-Paul Sigwald. La fabrication se déroule au cours des années 1964 et 1965, et les satellites sont lancés respectivement le 11 janvier et le 22 mars 1967. La technologie de fabrication est classique pour l’époque : transistors et circuits localisés.
Intelsat III
Le programme Intelsat III qui suit ne donne lieu à aucune participation de Thomson ni de CSF. Les marchés concernant ces satellites sont attribués, à partir de 1966, par Intelsat à la société américaine TRW dont le fournisseur français est MATRA dans des domaines autres que celui des télécommunications de servitude, terme fréquemment utilisé pour désigner la télémesure et la télécommande.
Intelsat IV, «les grandes manœuvres»
En 1968, à la suite d’une compétition dont les deux concurrents finals sont Hughes et Lockheed, l’organisation passe à Hughes un marché pour quatre satellites de la nouvelle série, baptisée Intelsat IV, avec une option pour quatre autres.

Série des satellites Intelsat réalisés par Hughes Aircraft Company. De droite à gauche: Intelsat I, Intelsat II, Intelsat IV, Intelsat VI. ATES a participé à tous sauf à Intelsat I.
Les «grandes manœuvres» pour la participation à ce programme ont commencé en 1967. Bien que la décision de fusion entre Thomson (groupe électronique) et CSF ait été prise en septembre 1967, les deux compagnies ont continué de s’intéresser au programme Intelsat IV via leurs partenaires respectifs, c’est-à-dire Hughes pour Thomson et Lockheed pour CSF.
Des deux côtés, la tactique consiste à faire miroiter au maître d’œuvre américain le soutien éventuel de la délégation française à Intelsat au cours du vote final, à condition que la proposition contienne une participation française substantielle, et de préférence supérieure à celle contenue dans l’offre concurrente. La même tactique est utilisée par les industriels britanniques et allemands vis-à-vis de leurs délégations nationales.
L’appel d’offres est publié par Intelsat le 5 février 1968. À la Division Télécommunications de Thomson, les premières négociations sont menées avec Hughes par Pierre Gautier sur le plan commercial et par Pierre Deman et Claude Michaud sur le plan technique. Elles aboutissent, en avril 1968, à un MOU (Memorandum Of Understanding) signé, pour Hughes, par R. Rooney, Directeur adjoint de la «Space Systems Division», et, pour Thomson, par Jean Menard, Directeur de la Division Télécommunications.
Les fournitures prévues pour Thomson, dans la mesure, bien entendu, où Hughes gagnerait le marché Intelsat IV, consistent dans le sous-système complet de télémesure-télécommande, comprenant les émetteurs de télémesure, les récepteurs de télécommande en bande C, les décodeurs de télécommande, les codeurs de télémesures et les antennes pour trois des quatre satellites. Les matériels étant conçus par Hughes, il s’agit d’une fabrication sur plans suivie des essais et de la recette.
Les composants électroniques sont fournis gratuitement par Hughes. Le montant prévu du marché pour l’ensemble de la fourniture est de 2 392 000 dollars.
Le détachement éventuel d’ingénieurs et de techniciens de Thomson chez Hughes, pour une période de formation puis pour une participation à l’intégration des satellites, fera l’objet d’une négociation séparée.
Parallèlement aux négociations menées par la Division Télécommunications pour la fourniture de matériels, le Bureau des Activités Spatiales du siège, avec Vladimir Altovsky, tente d’obtenir une augmentation de la participation française et, en particulier, de celle de Thomson.
Sous la pression de ses trois principaux partenaires européens, le Britannique British Aircraft (BAC), l’Allemand Telefunken et le Français Thomson, Hughes a accepté de discuter la possibilité d’intégrer un ou deux modèles du satellite, ou tout au moins de la plate-forme, en Europe. On acquiert le principe que sur la première tranche de quatre satellites, les deux derniers, F3 et F4, seront intégrés chez BAC à Bristol.
Cependant, BAC ne dispose pas de tous les moyens matériels pour se charger de la totalité des essais finaux, en particulier les essais de vibrations et en vide thermique.
De tels moyens d’essais existant ou étant en cours d’installation au centre de Toulouse du CNES, Vladimir Altovsky propose que, au lieu de retourner les satellites chez Hughes pour les essais finals, ces derniers soient effectués à Toulouse avec la participation d’une équipe européenne dont Thomson ferait partie.
Initialement, Hughes donne un avis favorable à cette proposition, tout en posant des conditions impératives quant à la disponibilité, en temps utile, des moyens du CNES.
Ensuite, et après de nombreuses discussions, Hughes estime ne plus pouvoir mettre en œuvre cette solution, et les seuls travaux d’intégration sous-traités en Europe seront l’intégration par BAC à Bristol des plates-formes de F3 et F4.
Entre-temps, suite à la décision prise en avril 1968 par Thomson et CSF de regrouper les activités spatiales à la Division MAS, cette dernière a pris la responsabilité de l’affaire Intelsat IV, et la suite des négociations avec Hughes est conduite, outre Vladimir Altovsky du Bureau des Activités Spatiales, par Louis Julien-Binard, Directeur de la Division, et Yves Laurens, Directeur Commercial.
Du côté de Lockheed, seul concurrent de Hughes encore en course, la proposition faite par CSF avant la fusion a été maintenue.
Les matériels proposés sont les filtres multiplexeurs d’entrée et de sortie (IMUX et OMUX) dans les répéteurs de télécommunications en bande C, pour un montant d’environ 1 300 000 dollars.
Le succès éventuel de Lockheed est évidemment moins intéressant pour la nouvelle compagnie Thomson-CSF mais il est, par contre, globalement plus intéressant pour la France, et donc pour la délégation française à Intelsat, car Lockheed propose d’acheter à la SAT (Société Anonyme de Télécommunications) les cellules solaires et leur installation pour un montant proche de 5 millions de dollars.
Le «lobbying» de Thomson-CSF se développe dans deux directions pour tenter d’obtenir un vote de la délégation française favorable à Hughes ; il s’agit de :
– démontrer que la nature des matériels qui doivent être fabriqués par Thomson-CSF pour Hughes représente la meilleure occasion pour former l’industrie française à la réalisation de matériels électroniques spatiaux ;
– tenter d’obtenir de Hughes qu’il approvisionne au moins une partie des cellules solaires de ses satellites à partir de la SAT afin de relever le montant financier de la part française.
En juillet 1968, se tient la réunion des «gouverneurs» d’Intelsat au cours de laquelle doit être choisi l’industriel avec lequel l’organisation entrera en négociation pour le contrat de fourniture des Intelsat IV.
Préalablement, le «gouverneur» français, Jean Voge, est invité à rendre visite aux deux industriels concurrents. Jacques Chaumeron est dépêché à El Segundo pour assister à sa visite chez Hughes et pour continuer ensuite le «lobbying» à Washington autour de la réunion des «gouverneurs».
Enfin, le 12 juillet 1968, la décision est prise d’entrer en négociation avec Hughes. Le programme Intelsat IV peut démarrer.
Le déroulement du programme
Pour Thomson-CSF, si l’on excepte les négociations finales qui aboutiront aux contrats de sous-traitance, le travail industriel commence en 1969 sous trois formes différentes.
1- Le détachement chez Hughes de dix-sept ingénieurs et techniciens pour participer à la définition des matériels et recevoir une formation afin de s’assurer que les prestations et fournitures de Thomson-CSF soient en conformité avec les normes définies par Hughes.
Les séjours individuels durent, pour la plupart, environ deux à trois mois chacun, et couvrent l’ensemble des spécialités nécessaires (études, technologie, fabrication, essais, assurance de qualité).
On peut voir sur une photo, auprès d’une maquette d’Intelsat IV, l’ensemble des participants à ces stages, qui représentent le début d’une formation qui, tout au long du programme, permet à l’ensemble du personnel du Département Espace-Satellites d’acquérir les connaissances et expérience nécessaires à son succès dans les programmes ultérieurs.
Deux des ingénieurs du groupe, Guy Bertaud et Jean Guillemin, voient leur mission prolongée et restent en fait à El Segundo de février 1969 à septembre 1970.
Guy Bertaud participe à l’étude mécanique des structures jusqu’aux essais du prototype de qualification. Jean Guillemin participe, dans les mêmes conditions, aux études des sous-systèmes électroniques.

L’équipe de la division MAS détachée chez Hughes Aircraft en 1969 pour Intelsat IV, avec Albert T. Owens, Program Manager de Hughes Aircraft Company (1). De Thomson-CSF au premier plan Guy Bertaud (2), Gérard Gourgon (3), Marcel Olivier (4), Jean-Paul Sigwald (5), Jean Gilet (6), au 2ème plan Guy Courregelongue (7), Jean Guillemin (8), Bruno Koenig (9), Jean-Louis Gautier (10), au dernier plan Michel Charrier (11), Jean Seigeot (12), Jean Angot (13), Eric Botterling (14), Christian Martin (15) et Gilbert Hamart (16). Et Gérard Beghin, Claude Dupont et Marcel Moreau.
2- Le détachement de longue durée (quinze à dix-huit mois) de quatre ingénieurs qui participent aux activités d’intégration des modèles de vol à partir de mai 1970. Leurs affectations sont les suivantes :
– Georges Blondin participe au développement des matériels d’essais ;
– Jean-Marie Fourquet est affecté à l’une des équipes («shift») chargée, au rythme des 3 x 8 heures, de l’intégration du modèle de vol F4 ;
– Gilles Griffon du Bellay est affecté à l’équipe qui apporte son support aux différentes équipes d’intégration pour les essais des charges utiles de télécommunications ;
– Jean-Claude Héraud participe d’abord à l’intégration du modèle de vol F2 avant de se voir confier la responsabilité d’un «shift», qu’il assurera de bout en bout, pour l’intégration du modèle F3.
À l’exception de Gilles Griffon du Bellay qui, pour des raisons personnelles, a décidé de rester en Californie, les autres ingénieurs reviennent au Département Espace-Satellites à l’automne de 1971 avec une formation et une expérience qui apportent beaucoup au Département, ainsi qu’à eux-mêmes pour la suite de leur carrière.
À ce sujet, une anecdote mérite d’être mentionnée, qui témoigne de la qualité du travail fourni par ces ingénieurs et de l’excellent souvenir que certains d’entre eux ont laissé chez Hughes. En 1972, pendant l’intégration des quatre modèles suivants d’Intelsat IV, Hughes a quelques problèmes de tenue de délais et décide d’augmenter momentanément ses effectifs d’intégration. C’est alors que Bill Murray, responsable de cette activité chez Hughes, demande à la Direction du Département ESA s’il lui serait possible de détacher à nouveau pour quelque temps Jean-Marie Fourquet, Jean-Claude Héraud, ou les deux. Malheureusement, les besoins opérationnels de l’époque ne permettent pas de donner suite à cette demande, d’autant que, pour des raisons tant familiales que personnelles, les intéressés, très honorés par cette demande, ne souhaitent pas s’expatrier à nouveau pour un travail qu’ils ont jugé particulièrement épuisant.
Il convient enfin de noter que Gilles Griffon du Bellay, resté en Californie, obtient, environ une année plus tard, un poste à la «Space and Communications Division» de Hughes où il poursuivra une brillante carrière.
3- La fabrication et les essais pour trois des quatre modèles de vol de la première tranche du sous-système complet de télémesure et télécommande en bande C : émetteurs, récepteurs, codeurs, décodeurs et antennes.
Il s’agit d’une fabrication sur plans de matériels conçus par Hughes, qui fournit gratuitement les composants haute fiabilité.
Il y aura quelques «alertes composants» déclenchées par des problèmes de fiabilité détectés chez Hughes ou chez d’autres sous-traitants. Dans chaque cas, il faudra, selon des procédures précises et mises en œuvre avec minutie, ex-traire les composants présumés défectueux de matériels qui sont parfois terminés et les remplacer en reprenant, bien entendu, tous les essais après le remplacement.
Ces travaux de fabrication et d’essais, encadrés par un inspecteur résident de Hughes, qui se comporte certes comme un inspecteur, mais aussi comme un professeur, contribuent énormément à la formation des services techniques et de fabrication du Département ESA ainsi que de son service «Qualité».
On peut dire, sans exagérer, que le programme Intelsat IV, où le client direct est un industriel qui non seulement signale les anomalies mais participe activement à l’élaboration de leurs solutions, aura été pour la Division MAS puis pour le Département ESA la meilleure école, dont l’enseignement aura créé une compétence et un état d’esprit engageant l’avenir pour la décennie suivante.
Les matériels et leur réalisation
Les satellites Intelsat IV de la première tranche emportent douze répéteurs en bande C (6/4 GHz) entièrement redondants et équipés de tubes à ondes progressives de 7,5 watts.
La masse sèche de chaque satellite est d’environ 500 kilos pour une masse totale au lancement d’environ 1 500 kilos. Ils sont stabilisés par la rotation du corps du satellite, la partie supérieure de ce dernier, contenant entre autres les antennes, étant «despinnée», c’est-à-dire asservie à une orientation fixe par rapport à la Terre.
La participation non américaine pour les répéteurs de télécommunications est répartie entre Northern Electric (Canada), AEG-Telefunken (Allemagne) et NEC (Japon). Le sous-traitant non américain pour les antennes de télécommunications est Selenia (Italie). Quant à Thomson-CSF, elle est chargée de fabriquer le sous-système complet de télécommande et télémesure. Celui-ci fonctionne en bande C, avec par conséquent des émetteurs à 4 GHz et des récepteurs à 6 GHz dont la technologie est, à l’époque, classique, c’est-à-dire celle des circuits localisés.
Les antennes, émission et réception, sont constituées chacune d’un bicône et sont placées sur l’axe de rotation du satellite, au sommet des antennes de télécommunications, afin d’assurer un diagramme de rayonnement torique.
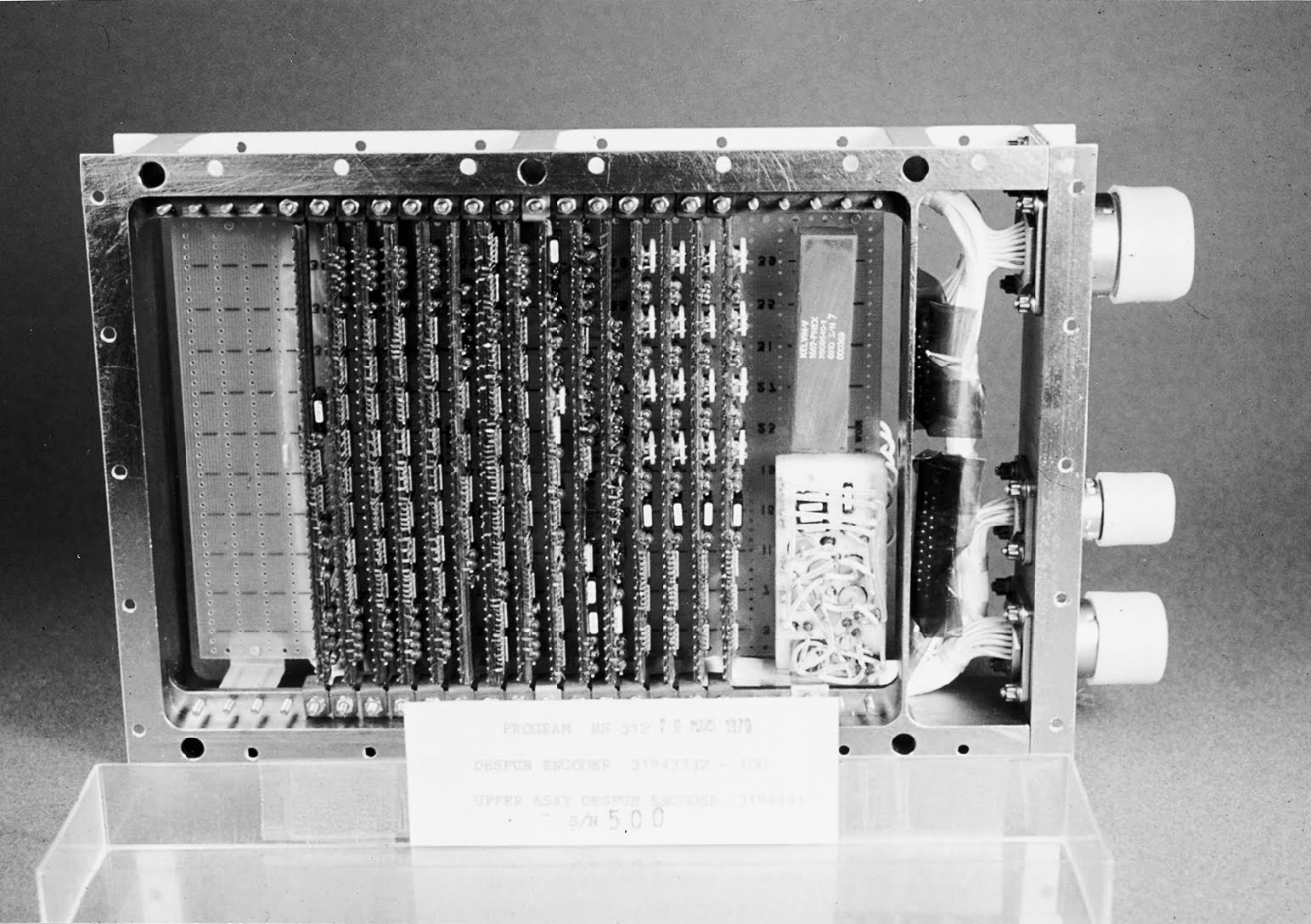
Codeur de télémesures (despun encoder) d’Intelsat IV. Exemple de technologie « MICAM »
Les parties digitales du sous-système (codeur et décodeur) sont réalisées selon une technologie originale baptisée MICAM et développée par Hughes. Les composants (transistors, circuits intégrés, résistances, condensateurs) sont alignés par collage sur des plaquettes d’aluminium de forme allongée qui portent chacune de cinq à dix composants.
Des pattes de connexions isolées sont fixées sur la face opposée de chaque plaquette, perpendiculairement à son grand axe. C’est sur ces pattes que l’on fixe, par soudure électrique, les connexions des composants en laissant une longueur suffisante pour que, en cas de nécessité de changement du composant, on puisse couper la partie soudée, enlever le composant et souder les connexions de son remplaçant sur la partie restante de la patte. Ce système permet d’effectuer jusqu’à deux changements successifs du même composant.
Après alignement des plaquettes dans un boîtier plat, les connexions entre plaquettes sont effectuées dans un plan qui leur est perpendiculaire. Le boîtier est ensuite «potté» et fermé.
Lorsque, à la suite d’une panne en cours d’essais ou d’une «alerte composants», un remplacement s’avère nécessaire, les «artistes» du Service Fabrication ouvrent le boîtier, pratiquent, avec l’équivalent d’une fraise de dentiste, des tranchées dans le matériau du «potting», afin de pouvoir ensuite couper les connexions de la plaquette, extraire celle-ci et y remplacer enfin le composant défectueux.
Le «moniteur de travaux pratiques» pour ce genre d’opération, tout au moins à leur début, est John Wood, inspecteur résident de Hughes, qui y fait preuve d’une grande patience associée à une parfaite courtoisie. Sous l’impulsion de Francis Violet, le Département ESA fait ensuite évoluer le procédé MICAM en y apportant des améliorations.
Après la fabrication, les mises au point et essais de matériels sont exécutés par les deux services techniques du Département, le Service HY de Marcel Palazo, assisté de Jacques Gillet et André Arbonel, pour les émetteurs, récepteurs et antennes, et le Service ES de Roland Gosmand, pour les codeurs et décodeurs.
Afin de coordonner l’ensemble des travaux et de canaliser les liaisons avec Hughes, un chef de projet Intelsat IV a été nommé pour le Département ESA : ce poste est occupé initialement par Roger Durand qui, affecté ensuite au programme Symphonie, est remplacé, à partir du début de 1971, par Guy Bertaud qui vient de rentrer d’El Segundo.
La fabrication et les essais de trois sous-systèmes pour les modèles F2, F3 et F4 s’échelonnent de fin 1969 à fin 1970.
Finalement, des matériels fabriqués par Thomson-CSF pour F2 voleront malgré tout sur le modèle F1, le dernier de la série, lancé le 22 mai 1975. À la suite d’incidents sur les matériels fabriqués par Hughes et destinés à F1, les matériels de Thomson-CSF auront, en cours d’intégration, été utilisés comme rechanges et remplacés ensuite sur F2 par les matériels de Hughes réparés.
La seconde tranche de matériels pour Intelsat IV
Vers la fin de l’année 1969, Hughes entre en négociations avec Intelsat pour la fourniture de quatre satellites supplémentaires (F5 à F8) prévus en option dans son premier contrat.
La discussion sur les prix est sévère et cette sévérité est, bien entendu, répercutée par Hughes dans ses négociations avec ses sous-traitants.
Les négociations avec Thomson-CSF pour cette nouvelle fourniture, commencées fin 1969, durent jusqu’à fin avril 1970. L’expérience des trois premiers satellites a permis d’établir une proposition basée sur des données plus précises mais, entre-temps, suite aux événements de 1968, les taux horaires d’une bonne partie de l’industrie française, et donc de la Division MAS, ont sérieusement augmenté par rapport à ceux utilisés pour la première proposition.
Dans cette dernière, les faibles taux horaires pratiqués chez Thomson par rapport à ceux de Hughes avaient permis aux prix de vente de Thomson d’être à peu près comparables aux coûts de production de Hughes. Ce dernier n’avait donc aucun désavantage à sous-traiter, si ce n’est celui qui résulte des frais entraînés par la formation et le contrôle du sous-traitant.
En 1970, si les prix de vente de Thomson-CSF sont peut-être encore compétitifs avec les prix de vente de Hughes, ils sont loin de l’être vis-à-vis de ses coûts de production, et c’est ce dernier critère que Hughes utilise dans les négociations. N’ayant pu obtenir d’Intelsat qu’une compensation très partielle pour ce qu’il estime être une contrainte nouvelle, Hughes décide de réduire les quantités de matériels sous-traités à Thomson.
Pour les trois satellites F6, F7 et F8 de la seconde tranche des Intelsat IV, Thomson-CSF n’aura à fabriquer, dans le sous-système de télémesure-télécommande, que les émetteurs, récepteurs et antennes. La fabrication des codeurs et décodeurs reste chez Hughes.
À Thomson-CSF, les fabrications des matériels pour cette seconde tranche débutent au milieu de l’année 1970, et les dernières livraisons sont effectuées au début d’octobre 1971. L’inspecteur résident de Hughes, John Wood, quitte Vélizy vers le 10 octobre.
Depuis le début de 1970, la «Space Systems Division» de Hughes, dirigée par Fred Adler, est devenue une unité plus importante : le «Space and Communications Group». Il est dirigé par Albert Wheelon dès sa création et jusqu’au programme Intelsat VI dont il sera question un peu plus loin.
Les lancements d’Intelsat IV
Le tableau ci-dessous donne les dates des lancements des satellites Intelsat IV où figurent des matériels fabriqués par Thomson-CSF :
F2 25-01-1971
F3 19-12-1971
F4 22-01-1972
F6 20-02-1975
F7 23-08-1973
F8 21-11-1974
F1 22-05-1975
Hughes tient à donner un aspect solennel au premier lancement, celui de F2. Trois représentants de Thomson-CSF sont invités : Marc de Saint-Denis, Directeur des Affaires Civiles, qui représente le Président Bouyssonnie, Alexandre Boudigues, Directeur de la Division AVS (à droite sur la photo), et Jacques Chaumeron, Directeur du Département ESA.

Visite des installations de Cap Canaveral par les industriels partenaires de Hugues lors du lancement du premier Intelsat IV. Au premier plan à droite, Alexandre Boudigues Directeur de la Division AVS
Après un dîner solennel émaillé de discours, tenu dans la soirée du 20 janvier, et une visite officielle du centre spatial Kennedy dans la matinée du 21, le lancement est prévu le même jour, vers 19 h 30. Malheureusement, dans le courant de l’après-midi, un sondage météorologique révèle l’existence d’un cisaillement de vents (wind shear) atteignant jusqu’à 240 kilomètres/heure entre les altitudes de 40 000 et 45 000 pieds (12 000 à 13 500 mètres). C’est bien au-delà des conditions que peut supporter le lanceur Atlas, et le lancement est reporté de vingt-quatre heures.
Le lendemain matin 22 janvier, les conditions météorologiques sont bonnes mais le sondage de l’après-midi annonce le retour du cisaillement à un niveau semblable à celui de la veille. Ce scénario se reproduit les deux jours suivants et ce n’est que le lundi 25 janvier que le lancement peut avoir lieu, à 19 h 26 heure locale. Aucun des invités n’ayant prévu dans son emploi du temps plus d’un ou deux jours de retard, ce lancement est effectué en petit comité. Aucun représentant de Thomson-CSF ne peut y assister.
Intelsat IVA
Dès le début de 1970, des rumeurs commencent à circuler sur ce que sera la suite du programme Intelsat après la réalisation de huit Intelsat IV. On peut s’attendre, dans les années à venir, à l’élaboration par Intelsat de nouvelles spécifications devant aboutir à un nouvel appel d’offres pour des satellites de capacité plus importante, et bénéficiant de l’évolution de la technologie. On commence donc à parler du futur Intelsat V.
Il est de bonne guerre que le titulaire du précédent contrat cherche à tirer profit de ses réalisations en les faisant évoluer.
Hughes élabore donc une nouvelle proposition à Intelsat pour des satellites d’une masse voisine de celle des Intelsat IV mais fournissant vingt canaux de répéteurs entièrement redondants, au lieu de douze, et des antennes permettant une couverture mieux adaptée aux zones à desservir, ainsi que la réutilisation de fréquences obtenue grâce au découplage des différents faisceaux.
Cette proposition donne suite à un nouveau contrat pour la fourniture de six satellites baptisés Intelsat IVA. Le Département ESA espère fermement participer à la réalisation de ces satellites, au moins dans les mêmes conditions que pour la seconde tranche des Intelsat IV.
Malheureusement, il n’en sera pas ainsi, pour les raisons qui sont exposées ci-après.
La brouille avec Hughes
Dès les premières rumeurs sur un futur programme Intelsat V, la question se pose pour Thomson-CSF de rechercher les conditions optimales pour y préparer une participation substantielle. L’une des ambitions est en particulier de ne pas se limiter à la télémesure et à la télécommande, baptisées par certains «télécommunications de servitude», mais de participer à ce qu’il convient d’appeler la partie «noble», c’est-à-dire la charge utile de télécommunications : répéteurs et antennes. Ce devrait être un moyen de valoriser dans le domaine des satellites les compétences acquises par la Division DFH dans le domaine des faisceaux hertziens.
Vladimir Altovsky, Directeur du Bureau des Activités Spatiales auprès de la Direction Générale, et à ce titre responsable de l’animation de ces activités, entreprend de rechercher une solution au problème posé.
À l’époque, il est difficile d’envisager, pour un programme Intelsat, et pour de multiples raisons, que le maître d’œuvre ne soit pas américain. C’est donc vers les États-Unis que s’orientent les recherches.
La question est naturellement posée en premier lieu à Hughes de l’éventuelle participation de Thomson-CSF à un programme Intelsat V.
Hughes, qui travaille exclusivement à la promotion de sa proposition de satellites Intelsat IVA et dont l’intérêt est de retarder au maximum un éventuel programme Intelsat V, répond qu’il est prématuré de parler d’Intelsat V et qu’il n’envisage pas, sur Intelsat IVA, de modifier son plan de sous-traitances par rapport à celui pratiqué sur Intelsat IV. En d’autres termes, Thomson-CSF doit se contenter pour l’instant de fabriquer des matériels de télémesure et télécommande sur plans de Hughes.
Cette position ne comblant en rien les désirs de la Direction Générale de Thomson-CSF, Vladimir Altovsky va poser les mêmes questions à Lockheed, concurrent malheureux de Hughes pour Intelsat IV et qui a, à l’époque, fait participer CSF à sa proposition.
Les dirigeants de Lockheed, qui, à la suite de leur échec sur Intelsat IV, ont ressenti l’existence d’une faiblesse dans le domaine des télécommunications, acceptent avec un certain enthousiasme l’arrivée dans leur équipe d’une société capable de remédier à cette faiblesse.
Dans la seconde moitié de 1970, un accord est négocié entre Lockheed et Thomson-CSF d’après lequel, dans la proposition préparée par Lockheed pour Intelsat V, Thomson-CSF prendra la maîtrise d’œuvre de la charge utile de télécommunications. Lorsque l’existence de cet accord est connue de Hughes, la sanction est immédiate : Thomson-CSF ne se verra confier aucune sous-traitance dans le programme Intelsat IVA.
Le plan de charge à court terme du Département ESA s’en trouve sérieusement affecté mais les perspectives à moyen terme restent grandioses. On peut toujours rêver !
Le rattrapage d’Intelsat IVA
La compétition pour le programme Intelsat V, qui sera évoquée en détail plus loin, a lieu en 1975.
Les candidats à la maîtrise d’œuvre entreprennent chacun la promotion de leur proposition auprès des gouverneurs d’Intelsat. C’est là que les dirigeants de Hughes se rendent compte que le fait d’avoir éliminé le constructeur français Thomson-CSF risque d’indisposer à leur égard le gouverneur français.
Afin de renouer des relations acceptables, Hughes, avec lequel la Direction du Département ESA, personnalisée par Jacques Chaumeron et Pierre Gautier, a maintenu des contacts, décide de sous-traiter à Thomson-CSF les parties radioélectriques (émetteurs, récepteurs et antennes) des deux derniers modèles, F5 et F6, des satellites de la série Intelsat IVA.
Il s’agit toujours d’une fabrication sur plans fournis par Hughes, de matériels très voisins de ceux déjà fournis pour Intelsat IV.
Arrivant à un moment où la charge de travail du Département DSP diminue dangereusement, ce marché, quoique modeste, est le bienvenu, et son exécution se déroule sans incident notable.
Les deux satellites sont lancés respectivement le 29 septembre 1977 pour F5 (échec) et le 31 mars 1978 pour F6.
Les premières primes de vol
C’est à l’occasion du programme Intelsat IV que le Département DSP fait connaissance avec le système des «incentives», également appelées primes de vol, qui consistent pour le client à différer le paiement d’un certain pourcentage du montant du contrat et à procéder à des règlements échelonnés en fonction des performances des satellites au cours de leur vie en orbite.
Ce système est repris en Europe dans le programme Symphonie et se généralisera par la suite à la plupart des programmes de satellites de télécommunications.
Pour Intelsat IV et IVA, Hughes fait participer ses sous-traitants au système, et les paiements à Thomson-CSF des primes de vol correspondantes se termineront en 1979.
Intelsat V
Les études préliminaires
Comme il a été mentionné plus haut dans le paragraphe consacré à Intelsat IVA, les premiers contacts sont établis avec Lockheed par Vladimir Altovsky dès 1970.
Les relations dans le domaine spatial entre la Division DFH (Faisceaux Hertziens), qui détient la compétence technique pour les répéteurs de télécommunications, et le Département ESA (Espace-Satellites) de la Division AVS (Avionique et Spatial), bien que définies dans leurs grandes lignes par diverses notes d’organisation, ne sont pas encore codifiées dans le détail, ce qui laisse la porte ouverte à de nombreuses divergences d’interprétation.
Lorsque les premières discussions entre Vladimir Altovsky et les dirigeants de Lockheed convergent vers une attribution à Thomson-CSF de la responsabilité de l’ensemble des répéteurs de télécommunications dans une future proposition Intelsat V, il apparaît que les premières tâches devront porter sur des études de définition préliminaires de ces répéteurs, et que ce type de tâche devra être pris en charge par la Division DFH.
Alors que les répéteurs des satellites Intelsat précédents opéraient uniquement en bande C (6/4 GHz), il est admis que les futurs satellites Intelsat V auront quelques répéteurs fonctionnant en bande Ku, qui, au moins pour les zones du globe où le régime et la nature des pluies ne causeront pas une atténuation prohibitive, permettront de pallier l’encombrement prévisible de la bande C.
Pour se préparer à la future compétition, il va falloir mener des études préliminaires, aussi bien au niveau du sous-système répéteurs que des différents matériels (récepteurs, filtres, amplificateurs) qui doivent y entrer.
Sur le plan technique, la direction des opérations est confiée au Bureau Spatial de la Division DFH avec pour principaux intervenants Savely Schirmann et Bruno Blachier, récemment rentré d’un séjour de plusieurs années aux «Comsat Laboratories» où il s’est illustré dans des études de filtres multiplexeurs pour les satellites Intelsat. Pour les matériels de répéteurs en bande C, une expérience est en cours d’acquisition avec le programme Symphonie. Pour la bande Ku, la Division DFH s’intéresse dès 1970 aux appels d’offres lancés par l’ESRO pour des études de matériels fonctionnant dans cette bande, et partage ensuite avec AEG-Telefunken l’étude d’un répéteur dit «modulaire», qui sera celui du futur satellite OTS (Orbiting Test Satellite).
On peut donc prévoir qu’au moment où sortira l’appel d’offres pour Intelsat V Thomson-CSF disposera de quelques références.
De nombreuses discussions ont lieu entre représentants de Thomson-CSF, principalement le BAS et la Division DFH, et représentants de la Missile and Space Division de Lockheed, installée à Sunnyvale (Californie) près de San Francisco.
La proposition avec Lockheed
Au début de 1972, la Comsat lance pour Intelsat une consultation pour un premier programme d’étude baptisé Early Intelsat V qui doit aboutir à un avant-projet de satellite permettant à cette organisation de préciser les spécifications des futurs satellites Intelsat V.
Lockheed a fait savoir très clairement dès le début que le budget alloué par la Comsat ne permettrait pas de financer la totalité des travaux et qu’il appartiendrait à chacun de ses partenaires de participer au financement de sa contribution respective.
Le Département ESA, qui devra intervenir pour la fabrication des matériels et qui souhaite ne pas rester étranger à leur étude afin de veiller dès le départ au respect des contraintes spatiales, estime devoir assurer une certaine présence dans le dispositif initial.
Il s’ensuit une longue négociation qui a été relatée par ailleurs, et qui aboutit à la signature en février 1972 d’un protocole d’accord définissant le plus précisément possible le partage des responsabilités entre les Divisions DFH et AVS dans ce type d’affaire.
Du côté d’AVS (Département ESA), Jean Guillemin est désigné comme interlocuteur de Savely Schirmann et de Bruno Blachier dans l’affaire Early Intelsat V.
Le travail sur l’étude Early Intelsat V commence en avril 1972. Il faut fournir à Lockheed non seulement un avant-projet de répéteurs mais également tous les autres éléments devant entrer par la suite dans une proposition : organisation, répartition des travaux, plannings, estimation des coûts. Il s’agit en fait de ce que les Américains appellent un «Mock Proposal», c’est-à-dire un premier exercice de proposition dans son ensemble.
Pour cette dernière partie, le Département ESA doit intervenir en tant que futur responsable de la phase de réalisation des matériels et du sous-système. Il prend donc la direction de cette dernière partie du travail où Guy Bertaud remplit un rôle important.
Le Service Commercial du Département ESA en achève la mise en forme, en particulier pour la partie financière. Pierre Gautier et Guy Muzard y sont les principaux acteurs. L’ensemble du travail est achevé au début de 1974.
En même temps, un protocole d’accord, spécifique à Intelsat V, est établi entre les Divisions AVS et DFH pour définir avec précision les tâches et les responsabilités de chacun en cas d’exécution du programme.
Après remise du travail à Lockheed, l’année 1974 et une bonne partie de l’année 1975 voient se dérouler quelques discussions et travaux complémentaires.
Au début de 1974, le responsable du projet chez Lockheed a été changé. Joseph Knopow a été remplacé par John Hockenberry, ce qui a causé quelques perturbations à ce stade avancé de la préparation de la proposition.
En fait, parmi les principaux acteurs participant au programme à Thomson-CSF, l’optimisme ne règne pas quant aux chances de Lockheed de s’imposer dans la compétition pour Intelsat V.
Du côté du Département ESA, qui devient DSP en 1975, on commence à envisager des solutions de secours pour préserver quelques chances de participer au programme.
Les solutions de secours
La recherche de ces solutions est menée à partir de la fin de 1975, essentiellement par les dirigeants du Département DSP, Jacques Chaumeron, Directeur, et Pierre Gautier, chef des services commerciaux, avec le plein accord d’André Lepeigneux, nouveau Directeur de la Division DFH à laquelle DSP vient d’être rattaché.
Outre Lockheed, les compétiteurs prévus sont Hughes, TRW et l’ancienne société Philco, récemment rachetée par le constructeur d’automobiles Ford et qui prendra le nom de Ford Aerospace.
Les études financées par l’Agence spatiale européenne pour son programme expérimental de satellites de télécommunications en bande Ku permettent à Thomson-CSF de faire état d’une expérience et d’une certaine avance technique dans le domaine des récepteurs en bande Ku, où des solutions originales ont été expérimentées. Aucun développement équivalent n’a été fait de l’autre côté de l’Atlantique.
Il est donc décidé de proposer à Hughes de nous confier la réalisation des récepteurs en bande Ku avec laquelle nous pouvons apporter un «plus» à sa proposition.
Après quelques discussions, Hughes comprend l’intérêt de cette offre qui, valorisant la technologie développée en Europe, peut lui apporter, lors du vote final, l’appui de quelques délégations européennes.
La sous-traitance par Hughes à Thomson-CSF de matériels pour les deux derniers satellites Intelsat IVA est une autre action dans le sens de la «réconciliation» et de la recherche de l’appui de la délégation française.
Vis-à-vis de TRW et de Ford, l’approche est plus générale. Outre l’offre des récepteurs en bande Ku, on fait valoir qu’une importante participation de Thomson-CSF peut influencer favorablement le vote de la délégation française.
Les dirigeants de TRW acceptent le principe d’une sous-traitance de matériels à Thomson-CSF sous forme de récepteurs en bande C ou en bande Ku, les quantités ne pouvant être très importantes car cette société a déjà prévu une part française non négligeable en direction de son allié habituel : MATRA.
Chez Philco, par contre, dont des représentants ont visité Vélizy en 1975, Jacques Chaumeron et Pierre Gautier se voient répondre à Palo Alto que Ford a déjà prévu d’importantes sous-traitances à l’Aérospatiale, et qu’il n’y a nul besoin d’augmenter la participation française au-delà des TOP à 12 GHz qui doivent être fournis par la Division Tubes Électroniques (DTE) de Thomson-CSF.
Le dénouement
Le bilan des participations du Département DSP aux différentes propositions est le suivant :
– Lockheed : maîtrise d’œuvre du sous-système répéteurs avec des sous-traitances d’équipements dans différents pays ;
– Hughes : fourniture des récepteurs à 14 GHz ;
– TRW : promesse de sous-traitance de quelques récepteurs ;
– Ford : néant.
Au cours d’un premier examen des propositions remises au début de 1976, le Conseil des gouverneurs d’Intelsat décide d’éliminer Lockheed et TRW, et de retenir provisoirement Hughes et Ford en leur donnant quelques semaines pour fournir une «Best and Final Offer».
Les grandioses espoirs de Thomson-CSF, entretenus pendant les cinq dernières années, s’écroulent et, pour avoir l’espoir que DSP fournisse quelques matériels électroniques, il faut soutenir à fond la proposition de Hughes.
Un effort important de «lobbying» est entrepris par Pierre Gautier qui, à peine rétabli d’une intervention chirurgicale, se rend à Washington, en juillet 1976, pour assister les dirigeants de Hughes dans leurs dernières démarches. Malheureusement, Hughes n’a pu suivre la baisse de prix de dernière heure faite par Philco-Ford et ce sont ces derniers qui l’emportent.
Pour Thomson-CSF, l’honneur est sauf car la Division DTE va fournir des TOP, mais pour DSP c’est le néant, et une aggravation de la «traversée du désert» déjà commencée. Il reste cependant un élément positif : les contacts noués avec TRW permettront à DSP d’être consulté l’année suivante pour les soixante récepteurs en bande Ku du programme TDRSS, et ensuite de gagner cette affaire.
Intelsat VI
Les préparatifs pour la compétition en vue d’Intelsat VI commencent en 1980, c’est-à-dire quatre ans après celle d’Intelsat V.
Dès le milieu de 1980, Intelsat décide de préparer un appel d’offres pour un Intelsat VI de capacité élevée (trois fois celle d’Intelsat V), et bénéficiant de nouvelles technologies devenues disponibles. Le premier modèle doit être mis en orbite en 1986. Les lanceurs envisagés sont la navette spatiale (STS) et la future Ariane IV, mais ni l’une ni l’autre n’est encore opérationnelle.
La sortie de l’appel d’offres est prévue pour mars 1981. L’organisation fait savoir qu’elle apprécierait une importante participation d’industriels non américains.
Depuis la compétition pour Intelsat V, le Département DSP a acquis quelques bons arguments pour attirer l’attention des maîtres d’œuvre potentiels. En particulier, l’offre de récepteurs à 14 GHz contenue dans la proposition de Hughes a été la seule fourniture étrangère ayant fait l’objet, dans le rapport d’évaluation technique d’Intelsat sur cette proposition, d’un commentaire particulier en termes très favorables.
D’autre part, la phase de réalisation du programme Telecom 1 a commencé au début de 1980, et le Département y est maître d’œuvre de la charge utile.
Trois compagnies américaines suggèrent initialement à Thomson-CSF de participer à leur proposition : General Electric, Hughes et Ford Aerospace.
Avec General Electric, les contacts initiaux ne seront pas poursuivis car cette société décide assez rapidement de ne pas présenter de proposition. Entre Hughes et Ford se manifestera une concurrence acharnée pour attirer la participation de Thomson-CSF. Lorsque Intelsat publiera l’annonce préliminaire de l’appel d’offres, seules ces deux compagnies exprimeront l’intention d’y répondre.
L’appel d’offres est publié par Intelsat le 26 mars 1981 et les propositions sont remises le 24 juillet suivant.
Le Département DSP remet à Hughes, le 5 juin 1981, sa proposition pour la part qui lui est offerte.
Selon les habitudes d’Intelsat, chaque proposition doit comprendre un chapitre sur les prix, livré séparément des autres chapitres (technique, organisation, planning, etc.). Le premier examen des offres doit porter uniquement sur ces autres chapitres.
Intelsat doit, suite à cet examen, choisir un ou deux soumissionnaires pour une première négociation, ces derniers pouvant ensuite introduire dans leur offre les modifications résultant de la négociation, et soumettre une offre de prix définitive tenant compte de ces modifications. C’est à la suite de ce processus qu’Intelsat doit choisir le bénéficiaire du contrat.
L’appel d’offres demande que le plan de paiement prévoie que le règlement d’une partie du montant du contrat soit différé après la livraison des satellites, et soit lié au bon fonctionnement en orbite de chacun d’eux.
C’est la poursuite de la méthode des «incentives», mise en œuvre depuis Intelsat IV, mais où le pourcentage retenu pour les paiements différés augmente de programme en programme sous l’effet de la concurrence pour atteindre des valeurs de l’ordre de 20 %.
Une clause nouvelle est apparue : le soumissionnaire doit s’engager à ne pas souscrire d’assurance contre la perte éventuelle de ces «incentives».
L’appel d’offres porte sur une quantité initiale de cinq satellites, avec ensuite des options pouvant aller jusqu’à onze satellites supplémentaires, soit un total de seize.
Afin de s’assurer que Thomson-CSF fera l’effort maximum auprès de la délégation française à Intelsat pour obtenir un vote en sa faveur, Hughes offre à Thomson-CSF de lui sous-traiter, pendant huit ans, des matériels supplémentaires, soit pour des satellites Intelsat, soit pour d’autres satellites de télécommunications, américains ou non.
Les prix de la part du Département DSP dans la proposition de Hughes sont de 21 millions de dollars pour les cinq premiers satellites, 13,2 millions pour les trois satellites suivants, et des prix proportionnels à ce dernier pour des options supplémentaires allant jusqu’à huit satellites. Il faut ajouter à chacun de ces deux prix des montants respectifs de 6,8 et 3,5 millions de dollars correspondant à des TOP à 14 GHz fournis par la Division Tubes Électroniques.
Les sous-traitances supplémentaires que Hughes s’engage à passer, après avoir gagné le contrat Intelsat VI et bénéficié dans ce but du soutien de la délégation française, doivent s’élever à un montant compris entre 30 et 60 millions de dollars échelonnés sur huit ans.
Hughes s’engage de plus à subir une pénalité si le montant minimum des sous-traitances prévues n’est pas atteint.
Cet accord est négocié par Paul Visher pour Hughes, et par Jacques Chaumeron et Michel Lasalle, sous l’égide de Philippe Giscard d’Estaing, pour Thomson-CSF. Il est conclu le 23 juillet 1981, c’est-à-dire la veille de la remise de la proposition à Intelsat.
Vient ensuite l’examen des offres par Intelsat. En septembre 1981, le Conseil des gouverneurs rend visite aux deux soumissionnaires afin de se faire présenter leurs moyens industriels et juger sur pièces des travaux préparatoires sur le programme et de la façon dont il est prévu de le gérer.
Jacques Chaumeron et Michel Lasalle sont invités à cette présentation chez Hughes, qui a lieu les 20 et 21 septembre 1981. Enfin, après six mois d’un «suspense» émaillé, surtout vers la fin, de rumeurs qui attribuent alternativement la victoire à Ford et à Hughes, le rapport de la Direction Générale d’Intelsat en date du 20 janvier 1982 recommande au Conseil des gouverneurs d’entrer en négociations avec Hughes pour le contrat de fourniture des Intelsat VI. Le 12 février 1982, le Conseil des gouverneurs approuve cette proposition. Les négociations avec Hughes commencent sans délai et se terminent au début de mars, et le contrat est approuvé par le Conseil des gouverneurs le 26 mars. Le travail peut commencer, ou plutôt continuer, pour plus de quatre ans.
Pour Intelsat VI, Hughes est resté à la stabilisation par rotation, qu’il a déjà utilisée de Syncom à Intelsat IV. La masse sèche prévue pour chaque satellite est de 1 780 kilos, le corps principal du satellite ayant un diamètre de 3,6 mètres et une hauteur de 6,4 mètres, la hauteur totale après déploiement des antennes atteignant 11,7 mètres. La masse au lancement est de 3 750 kilos.
Pour ce lancement, les satellites doivent être compatibles avec Ariane 4 et avec la navette américaine. Leur durée de vie estimée est de dix ans. La couverture des antennes, outre des pinceaux étroits (spot beams) et une couverture globale, comprend deux zones hémisphériques et quatre zones dans la région atlantique. La charge utile permet une grande capacité de trafic téléphonique (soixante-dix mille demi-circuits), l’utilisation du TDMA et la réutilisation de fréquences. Le premier modèle de vol doit être livré avant mars 1986.
Le déroulement du programme à DSP
Le contrat entre Hughes et Thomson-CSF est signé en juin 1982. Il prévoit la fourniture d’équipements pour cinq satellites avec une option pour onze satellites supplémentaires. Son montant est d’environ 130 millions de francs.
Les équipements à livrer sont les suivants :
– 12 équipements modèles d’identification (MI), soit :
– 3 récepteurs en bande C en 2 types,
– 3 récepteurs en bande Ku,
– 6 OMUX en bande C en 2 types ;
– 76 équipements modèles de vol (y compris des modèles de qualification MQ), soit :
– 32 récepteurs en bande C en 3 types,
– 10 récepteurs en bande Ku,
– 34 OMUX en bande C en 2 types.
Jean Bouguet est désigné comme chef de projet pour l’ensemble de l’affaire. Il est suivi à ce poste par Jacques Beaucher en 1985 puis par Pierre Jaubert en 1986.
Les travaux doivent démarrer pendant la période du transfert du Département DSP à Toulouse. Afin d’éviter que ce transfert ne soit préjudiciable aux délais de livraison très réduits, les travaux d’étude et de réalisation commencent directement à Toulouse.
Les MI doivent être livrés en juin 1983, les MQ en novembre 1983, les premiers modèles de vol destinés au modèle de qualification du satellite (Y1) en février 1984, et les huit récepteurs du premier satellite opérationnel (F1) en juillet 1984.
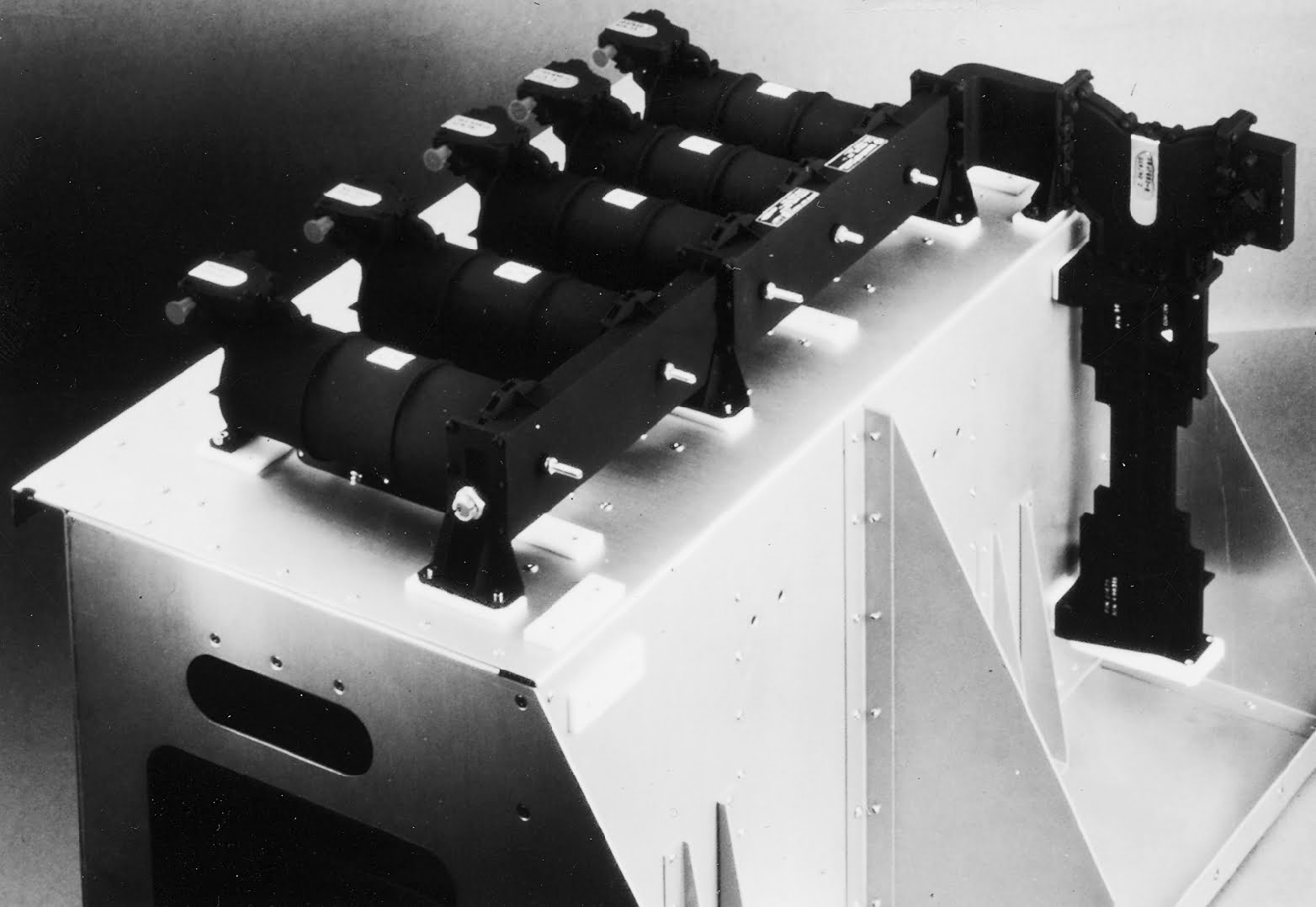
Intelsat VI – Multiplexeur de sortie (OMUX) 5 canaux en bande C
La mise au point et la réalisation des multiplexeurs de sortie (OMUX), suivant les spécifications techniques et dans les délais imposés, ne présentent pas de difficultés particulières, bien que ce soit la première utilisation de la technologie de l’invar mince qui vient de faire l’objet de brevets déposés par DSP, qui promet d’être plus économique et offre une plus grande précision dimensionnelle que celle des fibres de carbone utilisées dans Telecom 1. Les modèles de vol destinés successivement aux cinq satellites seront livrés dans les délais contractuels.
Pour les récepteurs, l’hypothèse faite au moment de la proposition a été que malgré quelques différences dans les spécifications, ils pourraient être dérivés assez facilement de ceux développés pour Telecom 1.
En fait, il s’avère assez rapidement que les performances demandées sont très difficiles à atteindre d’une manière répétitive et fiable avec les technologies utilisées. Il faut reprendre complètement la conception, ce qui demande des efforts techniques et des durées d’études plus importants que prévu. Le planning de livraison des modèles de vol s’en trouve très affecté.
Malgré ces efforts, les MI ne sont prêts qu’en octobre 1983 pour la bande C et en novembre 1983 pour la bande Ku.
Compte tenu des retouches des plans, de l’élaboration des gammes et de l’arrivée tardive de certains composants, il apparaît que les modèles de qualification, en dépit des mesures exceptionnelles qui ont été prises, ne pourront être livrés au mieux que fin mai 1984, ce qui compromet les livraisons des modèles Y1 et F1 et rend très risquée la tenue des délais sur F2.
Aussi, tout en mettant en place une organisation séparée pour la fabrication et les essais, il est nécessaire de négocier avec Hughes une diminution du nombre des récepteurs à livrer pour Y1 et F1, soit au total six récepteurs (deux Y1 et quatre F1), afin de pouvoir tenir les délais pour la suite du programme. À partir du milieu de 1985, la situation du planning se détériore à nouveau.
La situation générale d’Alcatel Espace (ATES qui a succédé à la Division Espace) a nécessité la mise en œuvre d’un plan social avec, au sein de la Direction Industrielle, des mesures de chômage partiel et de réduction de personnel. Ces événements, ajoutés à une augmentation dramatique des coûts cumulés de développement, conduisent à envisager l’hypothèse de l’abandon par ATES du programme Intelsat VI et de la résiliation du contrat.
Finalement, il est décidé de tout mettre en œuvre pour minimiser les retards de livraisons. Il faut rétablir le moral du personnel de fabrication, très affecté par l’annonce du plan social. Pour renforcer l’équipe d’encadrement et de suivi du projet, on fait appel aux «anciens» aguerris par le projet Telecom 1 : Jacques Beaucher et Pierre Jaubert. Un nouveau calendrier est accepté par Hughes, il constitue la limite acceptable pour la tenue du planning d’ensemble du programme.
L’organisation de l’activité en trois fois huit heures, sept jours sur sept, permet de surmonter les dernières difficultés et d’assurer les livraisons échelonnées des modèles de vol des récepteurs avec beaucoup de retard par rapport au programme initial, mais conformément au dernier calendrier accepté, ce qui restaure la confiance de Hughes. De plus, les coûts sont malheureusement très supérieurs aux prévisions initiales.
La réaction de conscience professionnelle manifestée par tous les participants durant la dernière année du programme évite d’ajouter aux séquelles morales d’un plan social, certes passagères, les conséquences d’un discrédit grave et probablement plus durable, auprès des industriels et opérateurs internationaux, et permet de confirmer le savoir-faire et la présence d’ATES dans l’industrie spatiale.
Dans la «foulée» d’Intelsat VI, ATES livre à la Chine, au milieu de 1986, deux récepteurs pour satellites en bande C dérivés de ceux d’Intelsat VI. Cette référence technique et commerciale contribuera certainement au choix effectué en faveur d’ATES, dix ans plus tard, pour la fourniture de la charge utile du satellite Sinosat.
Un événement survenu pendant le déroulement du programme Intelsat VI fait les gros titres de la presse toulousaine. Du 21 au 23 mars 1984, ATES est chargée d’organiser à Toulouse l’une des réunions périodiques, présidée par Hughes, de «management» du programme. Outre les directions d’ATES, de la Division «Space and Communications» de Hughes, sont présents des représentants des autres sociétés membres de l’équipe de Hughes : NEC du Japon, MBB de RFA, Selenia Spazio d’Italie, SPAR du Canada et British Aerospace de Grande-Bretagne, ce qui est annoncé par le journal La Dépêche comme : «Le sommet de l’Espace à Toulouse».
L’affaire se termine le 18 septembre 1986, par un fax adressé par Henry Di Christina, Directeur adjoint du programme chez Hughes, à Jacques Imbert, Président d’ATES, pour le remercier de la livraison des derniers matériels dus par ATES, et lui demander, au nom de la Direction et des équipes de Hughes, de remercier les équipes d’ATES pour leurs efforts et la qualité du travail fourni.
Début de cette page
All rights reserved © Copyright 1999-2004 Alcatel Space, Paris, France.
Les satellites de télécommunications
Aerosat
La naissance du programme
Dès le milieu des années soixante, l’utilisation de satellites pour l’aide à la navigation aérienne est mise à l’ordre du jour.
Sur les routes transatlantiques, les liaisons entre les avions longs courriers et les contrôleurs au sol sont effectuées en HF avec tous les aléas que peut rencontrer la propagation dans cette bande de fréquences. De plus, l’imprécision de la localisation effectuée par les avions eux-mêmes oblige à faire respecter entre ces derniers des distances d’espacement importantes.
Réduire ces distances grâce à de meilleures communications et à une localisation plus précise doit permettre à un plus grand nombre d’avions de se rapprocher de la route optimale et de réaliser des économies de carburant non négligeables, avec pour résultat immédiat une augmentation de la charge marchande.
Un système de localisation par satellite, en donnant aux contrôleurs une connaissance directe de la position précise de chaque avion, et en permettant de communiquer en permanence, doit contribuer à atteindre cet objectif.
Une étude publiée en 1967 par le CNES et le secrétariat général à l’Aviation civile jette les bases du système «Dioscures», dont la mise en œuvre est prévue pour gérer, à l’horizon 1980, un total de deux cents avions en vol simultanément sur l’Atlantique nord, dont quatre-vingts supersoniques ! En 1970-71 une expérimentation, où la Division Télécommunications de Gennevilliers fournit les matériels au sol, utilise des ballons stratosphériques pour simuler le satellite.
L’Organisation internationale de l’aviation civile (OACI), qui a exprimé son intérêt dès 1966 pour l’étude d’un tel système, recommande officiellement en 1972 la mise en œuvre d’un programme d’évaluation et d’expérimentation.
Il reste donc aux différentes agences à s’organiser pour que le programme devienne une réalité.
Du côté européen, le CNES, qui a déjà défini le système «Dioscures», propose à l’ESRO de le réaliser à l’échelle européenne, l’objectif étant le contrôle de la circulation sur l’Atlantique nord.
L’ESRO adopte le projet, le baptise Aerosat et recherche une participation de l’autre côté de l’Atlantique, c’est-à-dire aux États-Unis, puis au Canada.
Les négociations avec les États-Unis sont entamées en 1969. Le premier interlocuteur est la NASA, avec laquelle l’ESA signe un mémorandum d’accord pour le pilotage conjoint d’un programme expérimental. Malheureusement, peu après la signature, le gouvernement des États-Unis fait savoir que la NASA n’est pas habilitée à prendre un engagement dans le domaine de l’aéronautique et que la seule administration américaine ayant un tel pouvoir est la FAA (Federal Aviation Administration).
En janvier 1971, une déclaration d’intention de l’»Office of Telecommunications Policy» (OTP) de la Maison-Blanche aboutit à de nouvelles études techniques menées en commun par l’ESRO et la FAA. Un programme est élaboré en 1971 avec la participation du Canada. Le Japon et l’Australie manifestent également leur intérêt vis-à-vis du programme.
Après un premier mémorandum d’accord proposé en décembre 1971, les négociations entre l’ESRO, les États-Unis et le Canada sont reprises sur les bases suivantes: le programme de satellites sera financé à égalité par les gouvernements européens d’une part (47 %) et la Comsat américaine d’autre part (47 %), et par le Canada (6 %).
Un nouvel accord aboutit, le 2 août 1974, à la signature d’un mémorandum au titre duquel les trois parties s’engagent à mettre en place deux satellites préopérationnels destinés à faire une expérimentation et à évaluer les capacités d’un tel système. Les résultats doivent permettre à l’OACI de définir les spécifications du système opérationnel futur qui sera mis en place au cours de la décennie suivante.
Les éléments du segment terrien doivent rester la propriété de chacun des pays participants, leur développement étant cependant coordonné par l’organisation commune.
Il convient de mentionner deux hommes qui, par leur volonté opiniâtre, auront grandement contribué à l’aboutissement des négociations: David Israël, de la FAA, et Jacques Villiers, du secrétariat général à l’Aviation civile (France).
L’activité de Thomson dans le programme
Dès qu’il apparaît probable qu’un programme de satellite puisse être entrepris par les autorités françaises ou européennes, on commence à se préoccuper, à Thomson-CSF, de la formation industrielle qui pourrait attaquer le problème. Deux unités sont candidates pour le pilotage de l’affaire, le Département ESA parce qu’il s’agit de satellites, et la filiale TVT parce qu’il s’agit de contrôle du trafic aérien.
Après quelques réunions «animées», la balance semble pencher au début en faveur de TVT. Ensuite, il faut bien constater que, pour un tel programme de satellite de l’ESRO, Thomson, représentée par le Département ESA, est membre du consortium STAR, spécialement formé pour répondre aux appels d’offres de satellites lancés par l’ESRO. C’est finalement ce point de vue qui l’emporte et il est décidé que le Département ESA, assisté par TVT, pilotera la participation de Thomson au programme, dans le cadre du consortium STAR.
Il faut ensuite décider qui, au sein du consortium, prendra la maîtrise d’œuvre du programme. Pour la première étude préliminaire de phase A lancée par l’ESRO, cette administration décide de faire appel aux trois consortiums existants: Cosmos, MESH et STAR, afin d’aboutir à trois projets conçus par des équipes différentes et d’en tirer ensuite le meilleur parti. BAC (British Aircraft) est désigné par le consortium STAR pour être maître d’œuvre de cette étude, Thomson y participant pour la charge utile. Cette participation est confiée au Service Systèmes dirigé à l’époque par Claude Skenderoff. Jean-Claude Héraud est l’animateur de l’équipe, dont font partie quelques ingénieurs de TVT.
Dès que commencent à se préciser les nouvelles règles de retour industriel, où les participations européenne, canadienne et américaine doivent respecter au plus près les pourcentages de financement apportés par les différents pays, il faut rechercher des partenaires américains et canadiens. Thomson est chargée de ce rôle par le consortium STAR.
Au début des années soixante-dix, Thomson-CSF entretient des relations très suivies avec Hughes Aircraft dans le programme Intelsat IV. La question d’une éventuelle association pour le programme Aerosat est posée tout naturellement à cette société. Il apparaît rapidement que les dirigeants de Hughes n’ont aucune confiance dans les possibilités d’aboutissement du programme et ne sont pas disposés à engager des dépenses pour une proposition.
Côté européen, au contraire, la confiance règne. Une réunion de présentation du programme, organisée à Washington par la FAA et l’ESRO le 29 septembre 1971, a contribué à la renforcer.
Il est donc décidé, à Thomson, et avec l’accord des membres de STAR, de rechercher un autre partenaire.
Cette recherche se déroule en 1971 et 1972. Après des contacts avec Lockheed, Fairchild et RCA, cette dernière société semble être la meilleure candidate. Elle achève, en effet, l’étude d’un satellite de télécommunications auquel on peut facilement adapter la charge utile requise pour le satellite Aerosat. De plus, RCA possède une filiale au Canada, RCA Limitée, qui deviendra par la suite Spar Aerospace, et qui est apte à fournir la contribution canadienne.
En novembre 1974, Thomson-CSF signe avec RCA un accord pour la constitution d’un groupement industriel où RCA, maître d’œuvre, assumera la direction du projet et fournira le véhicule spatial, engin dérivé du satellite de télécommunications Satcom, construit par RCA pour un réseau national américain. Le consortium STAR, sous la responsabilité de Thomson-CSF, réalisera la charge utile du satellite et en particulier les répéteurs de télécommunications, RCA Limitée étant chargée des antennes.
La proposition
Après une longue attente, consacrée aux négociations entre administrations et à l’estimation de ce que pourrait être le programme, le travail de «mock proposal» commence, sous la maîtrise d’œuvre de RCA, Thomson ayant la responsabilité de la charge utile et de la supervision générale de la participation européenne. Ce travail consiste, selon les méthodes adoptées par la plupart des maîtres d’œuvre américains, à rédiger pratiquement une proposition complète avant la sortie de l’appel d’offres, à partir d’estimations de ce que pourraient être les spécifications. Cette méthode permet, en principe, d’éviter toute précipitation après la sortie de l’appel d’offres et de n’avoir à effectuer, après cette sortie, que des modifications supposées être mineures à une proposition déjà presque complètement rédigée.
Une équipe de projet est constituée au Département ESA, dont le chef de projet est Maurice Dumas. Il s’ensuit, pour cette équipe, un long travail de préparation qui comprend des contacts avec les clients pour avoir une idée des spécifications futures, des discussions avec les partenaires pour définir la part de chacun puis les différentes interfaces, des séjours plus ou moins longs chez RCA à Highstown (New Jersey) pour coordonner la définition des différents éléments du satellite, les plannings de réalisation, etc.
Une réunion du groupe de management. Assis de gauche à droite: Bob Hume de RCA, Pierre Gautier, Jacques Chaumeron et Maurice Dumas de Thomson-CSF, MM. Ditmar et Rausch de Dornier Systems
Le travail de «mock proposal» occupe le second semestre de 1975. Le chef de projet de RCA, Bob Hume, un ancien militaire, y mène tout le monde à la baguette.
Le Département ESA a eu le temps, pendant cette longue période d’attente, d’effectuer les études nécessaires à l’éclaircissement de certains «points durs» dans la définition de la charge utile.
L’ESRO a passé quelques marchés d’études dans ce but et, en particulier, le Service Hyperfréquences au sein d’ESA, devenu DSP à partir de 1975, dirigé par Marcel Palazo, a réalisé une maquette d’un émetteur à l’état solide d’une puissance d’environ 50 watts en bande L. La maquette de cet émetteur, avec ses circuits de mise en parallèle des transistors de puissance, qui ont donné des sueurs froides à quelques ingénieurs et techniciens, figurera longtemps dans le musée du Service Hyperfréquences.
L’appel d’offres finit par sortir le 15 février 1976. Il reste quatre mois pour remettre la proposition finale. Étant donné le travail déjà fait sur la «mock proposal», ce délai peut paraître long mais, pour le tenir, il faut en fait maintenir le rythme infernal des mois précédents. Le week-end de Pâques 1976 se passe à Highstown dans des discussions «au finish» sur les prix.
Une réunion du groupe de management Aerosat, de gauche à droite : Bob Hume (RCA), Pierre Gautier, Jacques Chaumeron et Maurice Dumas (Thomson-CSF), MM. Dittmar et Rausch (Dornier Systems)
Le dénouement
La proposition est remise à la date prévue; les membres du groupe de projet de DSP, qui ont réalisé une «première» dans une proposition de charge utile complexe, peuvent enfin se détendre tout en restant anxieux du choix que vont faire les clients.
Ce choix met longtemps à se dessiner et ce n’est qu’à l’automne de 1976 que le couperet tombe. Les trois offres sont équivalentes sur le plan technique, mais, grâce à une imagination plus grande du maître d’œuvre General Electric dans le maniement des «overhead» (traduction: coûts hors production), l’association General Electric-Cosmos a soumis un bien meilleur prix que ses concurrents.
Nous perdons, et c’est le début d’une baisse de charge qui conduira finalement DSP à mettre en œuvre, en 1977, ce que l’on n’appelle pas encore, à l’époque, un plan social, mais qui oblige néanmoins à reclasser, en grande partie dans le groupe Thomson, environ quatre-vingts personnes sur un total de trois cents, tout en essayant de maintenir le minimum de compétences qui permettront de redémarrer à partir de 1980.
Ayant perdu Aerosat, DSP et le consortium STAR ne sont pas les dernières dupes du projet. En effet, dès 1975, de nombreuses compagnies aériennes commencent à éprouver des difficultés financières et un certain nombre de facteurs les incitent à devenir très réticentes vis-à-vis du programme.
L’apparition des avions gros porteurs les oblige à supporter des investissements importants. L’augmentation de la capacité des avions tend à ralentir la croissance du nombre de vols sur l’Atlantique. À l’exception de quelques Concorde, il n’y aura pas de supersoniques. L’amélioration de la précision des moyens de navigation due à l’usage des centrales à inertie diminue, à leurs yeux et au moins provisoirement, l’intérêt d’une localisation par satellites. Elles ne sont prêtes ni à supporter les frais d’achat de nouveaux matériels à bord des avions, ni à payer les redevances qui leur seraient réclamées pour financer le fonctionnement d’un nouveau service.
C’est ainsi qu’après avoir passé plusieurs mois à négocier le contrat des satellites avec les organisations clientes, le consortium General Electric-Cosmos apprend que le programme est annulé.
Nos amis de Hughes Aircraft ont eu finalement raison de ne pas engager de dépenses dans cette entreprise.
TDRSS
En 1976, la NASA lance le programme TDRSS (Tracking and Data Relay Satellite System) qui vise à mettre en orbite des satellites géostationnaires destinés à servir de relais pour assurer les liaisons entre une station centrale, située sur le territoire des États-Unis, et ses satellites à moyenne et basse altitude dont, en particulier, la navette spatiale. Ce système doit se substituer au réseau de stations de poursuite, télémesure et télécommande réparties autour du globe. Il est également prévu, à bord du satellite, quelques canaux pouvant assurer des liaisons de télécommunications classiques.
Après un appel d’offres lancé aux États-Unis, la société TRW obtient le contrat pour la fourniture de six satellites.
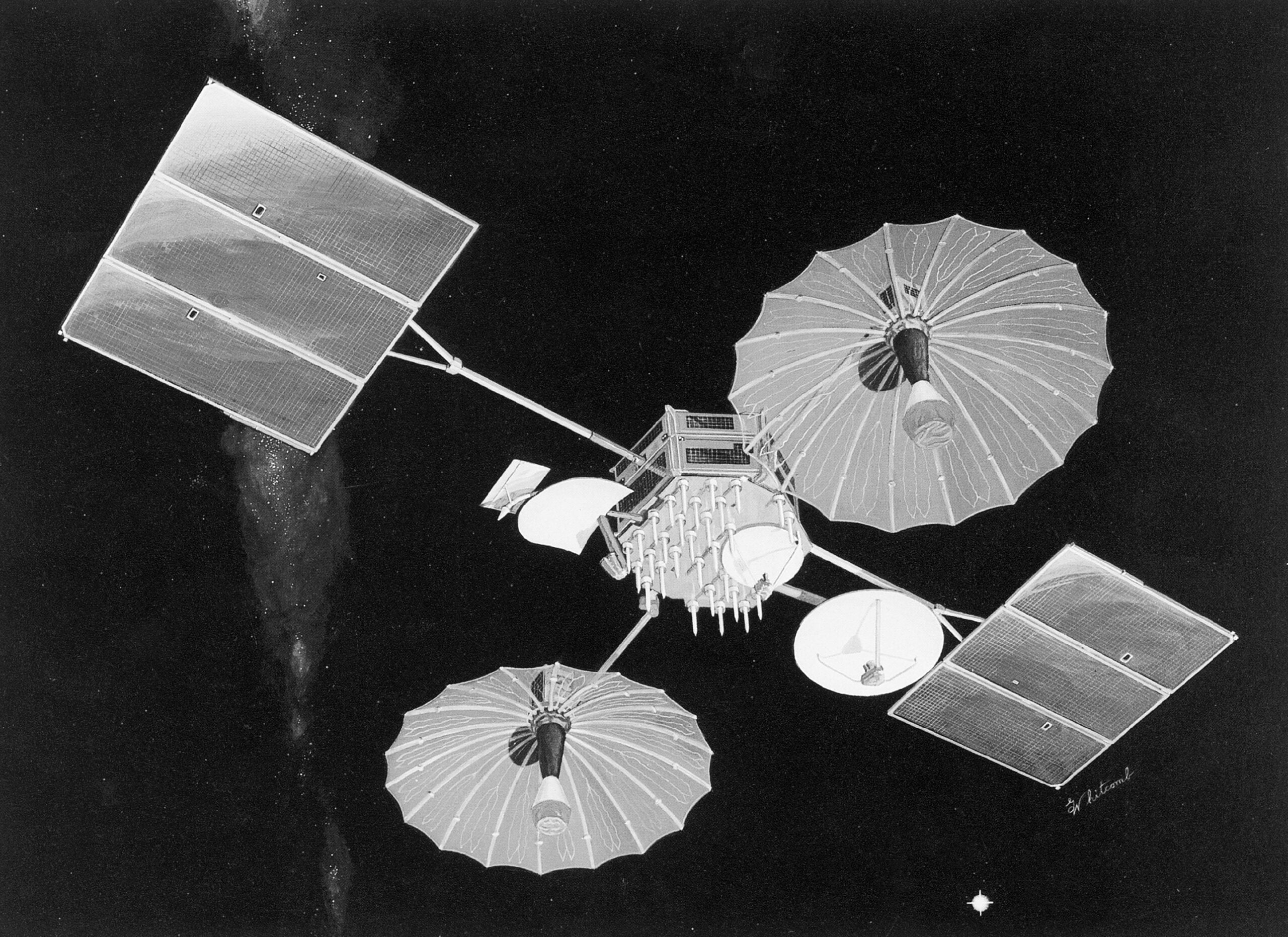
TDRSS
À la suite des contacts liés à l’occasion de la proposition Intelsat V, les dirigeants de la Division «Space Systems» de TRW ont remarqué la compétence acquise par Thomson-CSF dans le domaine des récepteurs en bande Ku.
Récepteur en bande Ku de TDRSS
Le Département DSP est donc consulté, en concurrence avec une société américaine, pour la fourniture de soixante modèles de vol (dix par satellite) des récepteurs en bande Ku qui doivent équiper les satellites.
Les solutions techniques mises au point par les laboratoires de la Division DFH permettent à DSP de présenter une proposition très compétitive, y compris sur le plan des prix, et l’affaire est gagnée en 1977. Les performances du mélangeur permettent d’obtenir le facteur de bruit demandé sans avoir besoin d’un préamplificateur, ce que les concurrents ne savent pas faire à l’époque.
Les études de maquettes sont menées en collaboration par les laboratoires Hyperfréquences de la Division DFH (Levallois) et du Département DSP, sous les directions respectives de Pierre de Bayser et de Marcel Palazo.
Après avoir réalisé et mis au point le modèle d’identification et le prototype de qualification, on passe à la fabrication. On s’organise pour une série dont on n’a pas du tout l’habitude dans le domaine des satellites.
La cadence de livraison prévue pour tenir les délais finals, compte tenu d’aléas éventuels, doit être proche d’un exemplaire par quinzaine. Le premier modèle de vol est livré fin septembre 1978. L’euphorie règne jusqu’à la mi-décembre, avec quelques petites «différences d’opinion» inévitables entre les concepteurs de DFH et les réalisateurs de DSP, ces derniers reprochant en particulier aux premiers le nombre élevé de vis de réglage et leur accessibilité pas toujours aisée.
Pour la première fois au Département DSP, des bancs de tests automatiques sont assemblés et mis en œuvre. C’est pour les responsables des essais, dirigés par Jean-Claude Lestriez, l’occasion de s’initier à des méthodes dont bénéficieront les programmes futurs avec, comme premier exemple, Telecom 1.
Vers la mi-décembre 1978, le récepteur numéro huit connaît quelques difficultés et, au bout de deux semaines, les techniciens chargés de la mise au point ne sont pas parvenus aux réglages optimaux.
Ce contretemps risque de retarder l’ensemble de la série et il faut, malgré les réticences de certains, que la Direction du Département décide elle-même de mettre le récepteur numéro huit de côté et de passer sans délai au numéro neuf. C’est une décision très inhabituelle à DSP où les «séries» de matériels fabriquées jusqu’alors n’ont jamais atteint le nombre de dix unités.
Il y aura quelques problèmes dans la mise au point du numéro neuf, et ensuite la fabrication et les essais des autres modèles se poursuivront sans incident notable.
En décembre 1979, on livre le quarantième modèle. La dernière livraison est effectuée au début de septembre 1980 avec un mois d’avance sur les délais contractuels. Il a fallu vingt-huit mois pour fabriquer et tester soixante modèles de vol, soit une cadence moyenne de 2,15 par mois.
Ce programme, qui n’a pas permis de dégager une marge bénéficiaire importante, a néanmoins contribué à assurer une charge de travail acceptable, en pleine traversée du désert.

Remise de prix annuel de TRW déstiné au meilleur fournisseur de l’année 1980. De gauche à droite: Paul Bachar Jr. (Executive Vice-President and General Manager West Coast Operations, Thomson-CSF), André Lepeigneux (Directeur des Affaires Internationales de Thomson-CSF), John E. Peterson (Vice-President Director of Material and Administrative Operations, TRW) et Jacques Chaumeron (Directeur du Département Espace-Satellites de Thomson-CSF).
L’exécution de ce programme n’a donné lieu à aucune difficulté vis-à-vis du client, la société TRW. Les chefs de projet qui se sont relayés au cours des deux années, Maurice Dumas et Jean-Claude Lestriez, n’ont jamais été obligés de mener une action «diplomatique» pour aplanir quelque difficulté que ce soit.
Au début de 1981, et pour couronner le réel succès de cette affaire, la société Thomson-CSF se voit décerner par TRW le prix du meilleur fournisseur (Best Supplier Award) pour l’année 1980, distinction purement honorifique matérialisée par un diplôme.
Le 19 février 1981, une délégation composée d’André Lepeigneux, Directeur des Affaires Internationales de Thomson-CSF, Jacques Chaumeron, Directeur du Département DSP, et Paul Bachar, Directeur du bureau de Los Angeles de TCI (filiale commerciale américaine de Thomson-CSF), reçoit le diplôme dans les locaux de TRW à Redondo Beach (Californie).
Après le programme Helios, dix ans plus tôt, TDRSS est le deuxième et brillant succès à l’exportation pour le Département DSP.
Arabsat
L’activité commerciale visant un programme de satellites de télécommunications couvrant les pays membres de la Ligue arabe commence à Thomson-CSF au début de l’année 1974. Hughes Aircraft, sous l’impulsion de Paul Visher, mène alors une action auprès de certains pays arabes pour promouvoir l’idée d’un tel système.
À cette époque, la Division Internationale de Thomson-CSF, dirigée par Gérald Cauvin, possède de très bons contacts dans plusieurs de ces pays, ce qui incite Hughes, alors en très bonnes relations avec Thomson-CSF, à rechercher son soutien dans son action commerciale.
La contrepartie doit être, bien entendu, une participation de Thomson-CSF à un éventuel programme de réalisation.
Au cours des années 1974 à 1976, les réunions et les actions commerciales se succèdent. La Direction du Département DSP participe à certaines d’entre elles.
En 1977, une coopération tripartite voit le jour entre Hughes, Thomson-CSF et NEC (Nippon Electric Company), ce dernier étant particulièrement intéressé par les stations terriennes.
Au début de 1978, un accord est mis sur pied entre les trois compagnies, qui stipule que les satellites seront fournis par Hughes, Thomson-CSF et NEC se partageant la fourniture des stations terriennes. Cet accord est valable uniquement dans le cas d’un seul appel d’offres groupant les satellites et les stations. Une clause prévoit que Hughes s’efforcera de sous-traiter des équipements des satellites à Thomson-CSF et à NEC.
Au cours de cette année, les événements s’accélèrent du côté de l’organisme client. L’organisation intergouvernementale Arabsat lance un appel d’offres pour des services de consultant pour la définition du système. C’est la société semi-gouvernementale américaine Comsat qui obtient le marché au début de mars 1978.
Les deux fournisseurs français de satellites Aérospatiale et MATRA sont, bien entendu, très intéressés par le programme Arabsat. À la même époque, ils se préparent tous deux à la compétition pour le satellite français Telecom 1 où Thomson-CSF est le seul fournisseur possible pour la charge utile. Tous deux sollicitent donc Thomson-CSF pour la fourniture de la charge utile d’Arabsat, qui doit comporter des répéteurs en bande C pour les télécommunications et un répéteur en bande S pour la diffusion de télévision.
Sollicité par trois maîtres d’œuvre potentiels, Thomson-CSF doit faire un choix. Il apparaît assez rapidement que seul le satellite fera l’objet de l’appel d’offres de l’organisation Arabsat, les stations terriennes devant être achetées individuellement par les différents pays sur la base des spécifications établies par Comsat.
L’éventualité d’une telle configuration change considérablement les données du problème en ce qui concerne les chances du Département DSP de participer d’une manière substantielle à la réalisation des satellites.
D’un côté, Hughes doit seulement «s’efforcer» de sous-traiter quelques équipements du satellite, de l’autre les deux maîtres d’œuvre français potentiels doivent confier à DSP la maîtrise d’œuvre de la charge utile.
De plus, dans le sillage de Telecom 1, on peut s’attendre à un très fort soutien «politique» des autorités françaises si une solution entièrement française est proposée.
Thomson-CSF décide donc de s’orienter vers une participation à une offre, soit de MATRA, soit d’Aérospatiale. Ces deux sociétés, qui s’affrontaient déjà pour Telecom 1, sont également prêtes à «en découdre» pour Arabsat, et le choix à effectuer par Thomson-CSF s’avère particulièrement délicat.
La Direction de DSP et celle de sa Division mère DFH se trouvent en première ligne pour prendre la décision.
Au début de l’été 1979, une profonde analyse des situations technique et commerciale fait pencher la balance en direction d’Aérospatiale qui semble la mieux placée pour gagner l’affaire, et la coopération avec cette société s’intensifie.
Le choix du maître d’œuvre de Telecom 1 en faveur de MATRA est annoncé le 21 septembre 1979.
C’est alors que la DAII (Direction des Affaires Industrielles et Internationales), qui fait partie de la DGT (Direction Générale des Télécommunications) de l’administration des Postes et Télécommunications, fait savoir à Thomson-CSF qu’elle n’admet pas que, dans le programme Arabsat, Thomson-CSF s’associe à un maître d’œuvre autre que celui qui a été choisi pour Telecom 1. Une telle pression de la part d’un très important client ne peut être qu’irrésistible, et DSP doit mettre fin à sa coopération avec Aérospatiale et s’associer à MATRA.
La «raison d’État» a anéanti les résultats d’une étude technico-commerciale particulièrement sérieuse.
La proposition de DSP pour la charge utile d’Arabsat est remise à MATRA le 7 décembre 1979 et c’est en mai 1981, après un temps d’évaluation particulièrement long, que l’organisation Arabsat annonce l’attribution du contrat à Aérospatiale, qui a confié à l’américain Ford Aerospace la réalisation de la charge utile.
La Direction de DSP, très désappointée d’avoir subi la «raison d’État» qui lui a fait perdre un marché qu’elle aurait dû gagner, aura, par la suite, quelques motifs de consolation:
– le gain d’Arabsat aurait considérablement aggravé les problèmes de surcharge industrielle provoqués par l’arrivée d’importants programmes (Telecom 1, SPOT, TDF 1) et le transfert à Toulouse;
– l’affaire Arabsat s’avère finalement désastreuse pour Aérospatiale sur le plan financier, en raison de nombreux contentieux qui n’auraient certainement pas épargné Thomson-CSF si elle avait participé à l’affaire.
Après de nombreuses péripéties, l’Aérospatiale livre, le 29 novembre 1984, son premier modèle de vol qui est lancé par Ariane le 8 février 1985. Le second est mis en orbite par la navette américaine le 17 juin 1985.
Telecom 1
Les préliminaires
Depuis la fin du programme Symphonie, dont les deux satellites ont été mis en orbite en 1974 et 1975, les industriels français de l’espace attendent avec impatience que les administrations nationales décident de la suite à lui donner.
Une expérience a été acquise dans le domaine des télécommunications par satellites et, même si, pour des raisons politiques, Symphonie n’a pu assurer une exploitation commerciale, il a été démontré que les industriels étaient capables de développer des solutions originales et performantes. La durée de vie opérationnelle des satellites dépassera finalement les prévisions initiales.
Un «lobbying» est entrepris pour que l’industrie française puisse continuer d’occuper une position la plus forte possible dans un domaine particulièrement prometteur.
À Thomson-CSF, les principales actions sont menées dès 1976 en direction de la DGT (Direction Générale des Télécommunications) par une équipe composée de Michel Faingold, auquel succédera Michel Lasalle, et de Gérard Coffinet, Directeur Commercial, à partir de 1975, de la Division DFH. Avant de quitter cette Division, André Lepeigneux a donné une impulsion de départ à ces actions.
Les administrations militaires, qui ont déjà passé à Thomson-CSF (Département DSP) quelques marchés d’études de faisabilité sur l’utilisation des satellites pour les télécommunications militaires, sont l’objet de démarches visant à les persuader qu’il est temps de passer aux réalisations concrètes.
Enfin, le CNES, qui a joué un rôle majeur dans le programme Symphonie et ne peut rester étranger à l’éventuelle mise en œuvre d’un système national de télécommunications par satellites, fait également l’objet de pressantes démarches.
Bien que les interlocuteurs rencontrés dans les administrations aient en général exprimé une certaine sympathie pour les arguments exposés car ils ne sont, eux non plus, pas restés inactifs depuis le succès du programme Symphonie, il faut un certain temps avant que les intentions exprimées ne se matérialisent.
À un niveau différent, mais non sans énergie, car le Département DSP vit alors sa «traversée du désert», sa Direction n’est pas restée inactive dans les démarches auprès des administrations.
Au cours de l’année 1978, les orientations se précisent; un programme national éventuel de télécommunications par satellites utiliserait très probablement à la fois la bande Ku et la bande C. Thomson-CSF est invité à présenter des propositions d’études préliminaires, dont les marchés devront être notifiés avant la fin de l’année. Le Département DSP, avec l’assistance des services techniques de la Division DFH, prépare des propositions sur ce que doivent être les points les plus difficiles des études.
L’année 1978 se termine sans qu’aucun marché d’étude n’ait été notifié. Heureusement, dès le début de 1979, les événements se précipitent, et la décision officielle d’un programme de satellites de télécommunications national est annoncée le 20 février 1979, date de l’accord donné par le Gouvernement. Il reste à choisir le maître d’œuvre et à préciser l’organisation industrielle.
A priori, rien n’empêche Thomson-CSF de se présenter comme maître d’œuvre potentiel car, après tout, il s’agit d’un satellite de télécommunications. Cette voie n’est pas retenue pour deux raisons, la première étant que dans l’esprit des administrations françaises, les deux seuls industriels compétents pour ce rôle sont MATRA et Aérospatiale, la seconde étant que Thomson-CSF estime n’avoir pratiquement pas, au niveau national, de concurrent valable pour la charge utile de télécommunications et peut donc légitimement prétendre assurer cette responsabilité auprès de l’un ou l’autre des maîtres d’œuvre.
Cette optique est finalement retenue par la DGT et il est convenu qu’une compétition sera ouverte entre MATRA et Aérospatiale pour la maîtrise d’œuvre du satellite, Thomson-CSF étant invitée à proposer sa charge utile à chacun d’eux.
À la suite d’une demande de proposition émise par la DAII (Direction des Affaires Industrielles et Internationales de la DGT) le 13 avril 1979, un premier marché, dit de phase B, est notifié à Thomson-CSF le 26 juillet 1979 pour l’étude de définition préliminaire de la charge utile. Le chef de projet de cette étude, menée par le Département DSP avec le concours des services techniques de la Division DFH, est Maurice Dumas. En fait, les travaux ont commencé par anticipation dès le mois de juin.
L’aboutissement de cette phase B est, outre un rapport de fin d’étude, une proposition technique et industrielle qui doit être remise au maître d’œuvre pour être intégrée à sa proposition pour le satellite complet.
Parallèlement, la compétition pour la maîtrise d’œuvre du satellite aboutit, le 21 septembre 1979, au choix de MATRA pour une étude de phase B. La décision définitive concernant les phases C et D sera prise «en fonction des résultats de cette étude» qui, en particulier, doit «être conduite dans le souci d’obtenir les meilleures contreparties à l’exportation, y compris sur les charges utiles».
Avant que ce choix, d’abord prévu pour fin juillet 1979, ne soit effectué, Thomson-CSF doit répondre à de nombreuses questions de l’Administration sur ses conséquences dans divers domaines tels que, par exemple, les avancées technologiques possibles, les participations des industries étrangères, les perspectives d’exportation de satellites dérivés de Telecom 1, etc.
Dans ses réponses à de telles questions, Thomson-CSF s’efforce toujours d’observer une stricte neutralité vis-à-vis des deux sociétés concurrentes.
Les perspectives d’exportation de satellites dérivés de Telecom 1 donnent lieu à la signature, au début de septembre 1979, d’un MOU (Memorandum Of Understanding) entre British Aerospace, MATRA et Thomson. Ce MOU prévoit que, en cas de victoire de MATRA, les trois sociétés s’engageront à négocier un accord de coopération pour l’exportation de satellites dérivés de Telecom 1.
Un MOU analogue a été signé fin août entre Ford Aerospace, Aerospatiale et Thomson-CSF.
Une première réunion de «kick off» du programme est tenue le 5 octobre 1979 avec le maître d’œuvre et les diverses administrations intéressées.
Les trois satellites objets du marché sont particulièrement complexes. Les répéteurs composant la charge utile de télécommunications doivent assurer les missions suivantes:
– cinq canaux en bande Ku (14/11 GHz) pour des liaisons de téléphonie et de services spécialisés intra-entreprises, en France métropolitaine et dans les pays limitrophes;
– un canal en bande Ku pour la distribution de programmes de télévision et de vidéocommunication;
– quatre canaux en bande C (6/4 GHz) pour les liaisons téléphoniques et la distribution de programmes de télévision entre la métropole et les Dom-Tom;
– deux canaux en bande X (8/7 GHz) pour les communications gouvernementales du système SYRACUSE (SYstème de RAdioCommunications Utilisant un SatellitE).
Dans aucun satellite de télécommunications réalisé jusqu’à cette époque on n’a pris le risque de faire cohabiter trois bandes de fréquences en plus de la bande S utilisée pour la télémesure et télécommande.
L’une des premières difficultés à résoudre par les ingénieurs du groupe de projet mis en place à DSP est de concevoir un plan de fréquences, à bord du satellite, qui évite toute interférence.
La zone de couverture des antennes doit être adaptée à chacune des missions:
– France et pays limitrophes pour la bande Ku;
– couverture «semi-globale» s’étendant de la Réunion à la zone Antilles-Guyane, sans oublier Saint-Pierre-et-Miquelon, pour la bande C;
– pinceau fin couvrant la zone Antilles-Guyane en bande C;
– couverture globale en bande X.
En plus de la charge utile de télécommunications, le Département DSP doit fournir le sous-système de télémesure, télécommande et localisation en bande S.
À l’instigation de l’Administration, Thomson s’assure les services, en tant que consultant, de Hughes Aircraft, pour la définition de la charge utile: cette requête est ouvertement justifiée par l’organisme client comme devant réduire les risques dus au «manque d’expérience» de l’industrie française.
En prenant connaissance des spécifications de la charge utile, lorsqu’ils commencent leur travail au début de 1980, la première réaction des représentants de Hughes Aircraft est de s’étonner que l’on prenne le risque de faire cohabiter trois bandes de fréquences dans la même charge utile. À leur avis, il vaudrait mieux assurer les services prévus avec au moins deux satellites différents.
Après une continuation de la phase B en liaison avec le maître d’œuvre désigné, MATRA, et avec l’assistance technique de Hughes, la phase de réalisation démarre effectivement en juin 1980, le marché avec les administrations n’étant signé que le 31 décembre 1980 pour deux satellites à lancer plus un modèle de réserve au sol.
Pour ce marché, Thomson-CSF, dont la participation sera supérieure à la moitié du total, a demandé à être conjoint avec le maître d’œuvre. L’Aérospatiale a accepté cette demande, mais MATRA, qui sera finalement choisi, a refusé, malgré les souhaits de la DGT. Thomson-CSF est donc sous-traitant désigné, avec paiement direct, et MATRA est titulaire du contrat.
La négociation donne lieu à quelques péripéties dont certaines auront des conséquences fâcheuses sur la rentabilité du programme à Thomson-CSF. Le Service Commercial de la Division DFH a une longue expérience des négociations avec l’administration des PTT et pourrait, dans une formule conjointe, en faire bénéficier MATRA. Ce ne sera malheureusement pas le cas.
En particulier, une clause imposée par l’Administration transforme une part non négligeable des paiements en «primes de vol» payables seulement en cas de fonctionnement correct, et un an après la mise en orbite de chacun des deux premiers modèles de vol. Pour Thomson-CSF, cela représente 33 millions de francs, soit plus de 10 % du prix de sa fourniture. Le Service Commercial du Département DSP, chargé d’établir le devis, n’a pas été prévenu en temps utile de l’existence de la clause et n’a donc pas été en mesure d’en tenir compte dans l’évaluation des frais financiers.
Ce n’est que trois ans après la livraison du premier modèle de vol de la charge utile que DSP pourra récupérer en totalité les 33 millions de francs manquants avec, sur la totalité de l’affaire, une marge sérieusement entamée.
Cette formule d’intéressement sous la forme de «primes de vol» sera, par la suite, généralisée dans la plupart des programmes de satellites en étant, à chaque fois, précisée dans les appels d’offres, ce qui permettra, à la différence de Telecom 1, d’en prévoir les conséquences.
Le programme Telecom 1, outre le satellite, comprend la réalisation de stations terriennes auxquelles s’intéressent la filiale Telspace, chargée de ce domaine, ainsi que la Division Faisceaux Hertziens (DFH) qui doit fournir une grande partie des matériels de ces stations.
Une Direction du Programme est créée au niveau de la Division DFH et confiée à Jean-Louis de Montlivault, nouvellement embauché en provenance de l’ESA, qui doit superviser l’exécution de l’ensemble des marchés: charge utile du satellite, stations terriennes et mise en place du réseau militaire SYRACUSE associé à la charge utile militaire du satellite.
Le déroulement du programme à DSP
L’arrivée du programme Telecom 1 est à l’origine d’une expansion très rapide du Département DSP qui, depuis 1976, a dû réduire ses effectifs au minimum acceptable pour avoir des chances de redémarrer. Il faut embaucher rapidement et former les nouveaux arrivants.
Le problème des surfaces industrielles devient rapidement critique et il est nécessaire de trouver de nouveaux locaux temporaires (Texas, La Boursidière, Les Mureaux) tout en prospectant pour une nouvelle implantation (Cergy, Toulouse…), en principe définitive.
Devant les risques courus à cause d’une expansion trop rapide, il apparaît raisonnable de limiter ceux-ci en sous-traitant une partie de la charge utile.
Les répéteurs en bande X (8/7 GHz), destinés aux télécommunications gouvernementales, sont choisis pour cette sous-traitance en plein accord avec les administrations clientes. Les raisons de ce choix sont, en premier lieu, qu’il semble relativement facile de trouver, aux États-Unis, des matériels quasi «standard» opérant dans cette bande, et ensuite que cette décision préserve les chances de DSP d’étendre son expérience dans les bande C et Ku, dans le domaine très prometteur des télécommunications civiles.
Les sous-traitances à Ford Aerospace
Trois industriels américains, connus pour avoir réalisé des matériels en bande X, sont consultés: Hughes Aircraft, Ford Aerospace et TRW. Hughes ne manifestant pas un réel intérêt pour cette affaire, la compétition sera limitée à Ford et TRW, et c’est Ford qui l’emportera.
On voit alors se créer une situation inédite: alors que dans toutes les affaires de satellites de télécommunications précédentes, et en particulier pour Intelsat, les maîtres d’œuvre ont été américains, les Européens se contentent du rôle de sous-traitants. Cette fois-ci, le maître d’œuvre est français, donc a priori moins expérimenté, alors que le sous-traitant est américain, c’est-à-dire, a priori, plus expérimenté. Cette situation, qui ne pose pas de problème important tant que l’affaire se déroule normalement, a cependant pour résultat, lorsqu’une difficulté surgit, une certaine réticence de la part de Ford à accepter les observations des représentants de Thomson. Beaucoup d’opiniâtreté est souvent nécessaire à ces derniers pour obtenir gain de cause.
Le principal incident se produit tout au début de l’affaire. Le contrat entre Ford et Thomson est paraphé par les deux parties le 29 août 1980. Ford repousse ensuite la signature finale pendant trois mois, conditionnant celle-ci à une modification de la spécification sur la distorsion de phase.
En novembre 1980, Ford annonce la nécessité de trouver une solution de remplacement à un transistor à effet de champ dont le fournisseur a arrêté la fabrication. Début décembre, Ford confirme qu’il doit s’orienter vers une solution de remplacement et en indique les conséquences sur les coûts, délais et performances.
Après une dure négociation, le contrat est enfin signé le 13 décembre 1980, moyennant une augmentation de prix non négligeable: 650 000 dollars.
La suite de l’exécution du contrat se déroule sans incident majeur sous l’oeil vigilant des ingénieurs résidents de DSP à Palo Alto: Jean Ramis et Jacques Haydont, et les matériels sont livrés dans les délais prévus.
D’autres matériels seront également sous-traités à Ford: les alimentations (EPC) pour les tubes à ondes progressives des répéteurs en bande Ku (12 GHz). Ces alimentations sont supposées être très voisines de celles que Ford a fournies en grande quantité pour les satellites Intelsat V.
Dans le cadre de cette fourniture, un incident notable mérite d’être signalé, qui démontre que la rigueur adoptée par DSP vis-à-vis de ses sous-traitants, même ayant des références supérieures aux siennes, est loin d’être inutile.
Au cours d’essais de vide thermique effectués en 1982, des anomalies de fonctionnement sont constatées sur le transformateur haute tension de l’EPC qui, en principe, d’après Ford, est supposé être qualifié par analogie avec celui d’Intelsat V.
À haute température et à la pression critique, des disjonctions se produisent. Une longue analyse de défaillance permet de constater l’apparition de fissures dans le matériau isolant au voisinage de la température maximale d’essais, dues à des dilatations différentielles. Des alimentations déjà livrées sont reprises par Ford pour adjonction de dissipateurs thermiques et le fournisseur doit relancer la fabrication d’un nouveau lot pour remplacer les transformateurs où des fissures ont été constatées.
Ces sous-traitances à Ford Aerospace permettent à DSP d’effectuer un bon apprentissage des méthodes à utiliser pour mener à bien une sous-traitance à un grand industriel américain.
Les antennes
Le sous-système «antennes» de Telecom 1 comprend six antennes indépendantes: trois cornets et trois antennes à réflecteurs.

Les antennes de Télécom I
Deux cornets assurent respectivement l’émission et la réception en bande X, le troisième étant consacré à la réception en bande C. Tous assurent une couverture globale.
La conception de ces trois cornets «corrugués» est largement déduite de celle du cornet de réception en bande C du satellite Symphonie. Leur étude et leur réalisation ne se heurtent à aucun problème particulier. Les trois antennes à réflecteurs se répartissent les fonctions suivantes:
– émission en bande C vers la France et les Dom-Tom (antenne dite «semi-globale»);
– réception des six canaux en bande Ku en provenance de la métropole et émission vers cette même couverture des canaux pairs en bande Ku (antenne dite «14/12»);
– émission vers la métropole des canaux impairs en bande Ku et émission d’un pinceau fin en bande C vers la zone Antilles-Guyane (antenne dite «4/12»).
L’ensemble des antennes est entièrement réalisé au Département DSP, à l’exception des réflecteurs en fibres de carbone, sous-traités à l’Aérospatiale. Cette dernière est également chargée d’effectuer les essais d’environnement des antennes complètes.
La source d’alimentation de l’antenne semi-globale donne l’occasion au laboratoire Antennes de DSP de transformer en réalisations concrètes les études d’antennes multisources qui ont commencé quelques années auparavant, à l’occasion d’une proposition pour le satellite brésilien.
La seule difficulté notable rencontrée dans le domaine radioélectrique concerne l’alimentation de la source de l’antenne semi-globale qui, prévue initialement en câble coaxial, doit finalement être remplacée par un guide d’ondes.
Par contre, la mise au point mécanique des réflecteurs, puis de l’ensemble de chacune des antennes, donne lieu à de multiples difficultés qui ne seront résolues qu’au prix de retards sur les délais de livraison contractuels, ces derniers n’entraînant heureusement pas de retard sur la livraison du premier modèle de vol de la charge utile.
Il apparaît rapidement que les logiciels utilisés initialement par l’Aérospatiale pour étudier les déformations thermoélastiques des réflecteurs et des supports, particulièrement critiques pour la stabilité des diagrammes de rayonnement et des directions de pointage, ne sont que partiellement adaptés aux problèmes à résoudre. De plus, DSP ne possède pas, à l’époque, de compétences suffisantes pour superviser ce type de travail.
Par approximations successives, et après des efforts méritoires tant du côté de l’Aérospatiale que de celui de DSP, les problèmes finissent par être résolus. Les antennes sont conformes aux spécifications, et leur comportement en orbite est conforme aux prévisions.
Les répéteurs «civils»
Bénéficiant de l’expérience acquise au cours des études et réalisations faites pour les satellites Symphonie, OTS et TDRSS, ainsi qu’au cours de l’exécution de marchés d’étude obtenus auprès de l’organisation Intelsat, le développement des répéteurs permet de matérialiser quelques innovations technologiques. L’une d’elles consiste dans la réalisation de filtres en fibres de carbone pour la bande C.

Multiplexeur de sortie (OMUX) de Telecom 1 en bande C, technologies fibre de carbone
Les études de base de cette technologie ont été faites dans le cadre d’un contrat d’aide au développement attribué par le ministère de l’Industrie. Quelques informations ont été obtenues par Francis Violet au cours d’une mission aux États-Unis mais, pour Jacques Urien, responsable de l’étude et du développement, quelques «pièges» subsistent. Faire adhérer la dorure aux parois internes des guides d’ondes et faire ensuite en sorte qu’elle ne se décolle pas sous l’effet des cycles thermiques n’est pas de tout repos. Il faut supporter quelques déceptions avant d’obtenir, par une expérimentation minutieuse, des résultats reproductibles.
Pour «draper» le tissu de fibres sur les mandrins, une opératrice est spécialement formée.
Le problème de l’humidité n’est pas le moindre. Un filtre réglé en atmosphère ambiante voit ses dimensions varier au cours des essais sous vide. Il faut donc tenir compte de ces variations pour le réglage, et réaliser ensuite une enveloppe étanche permettant de maintenir un certain niveau de dessiccation pendant le séjour des filtres dans l’atmosphère terrestre avant le lancement du satellite.
L’un après l’autre, tous ces problèmes sont patiemment résolus, et c’est en grande partie grâce à la technologie des filtres en fibres de carbone pour les répéteurs en bande C que la charge utile de Telecom 1 peut satisfaire aux spécifications de masse.
Pour les filtres en bande Ku, dont les dimensions géométriques sont plus petites, la fibre de carbone n’amène pas un avantage déterminant et la technologie utilisée est celle de l’Invar mince. Elle est développée à Levallois, par la Division DFH qui ajoute cette contribution à celle, très importante, qu’elle apporte dans les études des autres circuits des répéteurs.
Multiplexeur de sortie (OMUX) de Telecom 1 en bande Ku, Technologie invar mince
La collaboration entre DFH et DSP dans le cycle allant des études aux réalisations des matériels de répéteurs a été «rodée» au cours des programmes précédents; il y a, bien entendu, quelques désaccords momentanés qui sont vite résolus, en grande partie grâce à l’action de Pierre de Bayser qui, étant passé de DFH Levallois à DSP Meudon en octobre 1979, connaît suffisamment les deux unités pour régler rapidement les problèmes, en général mineurs, qui peuvent survenir entre elles.
Les études, le développement et les essais des répéteurs de Telecom 1 ne donnent lieu qu’à peu d’incidents notables.
Le décollement d’un bloc de ferrite dans un isolateur au cours d’un essai de qualification en septembre 1982 est à l’origine d’une analyse de défaillance et à des essais de vieillissement accéléré, dont les conclusions aboutissent à un renforcement des précautions prises au cours du montage et à des essais supplémentaires de déverminage.
Les premiers essais des oscillateurs locaux font craindre que les spécifications de stabilité de fréquence sur sept ans ne soient pas tenues. Des analyses théoriques et expérimentales, conduites à partir du début de l’année 1983, mettent en évidence quelques défauts de conception et de réalisation auxquels il est remédié sans que cela n’affecte les délais de livraison. Finalement, le comportement en orbite des oscillateurs locaux s’avérera conforme aux spécifications.
Enfin, quelques tâtonnements seront nécessaires pour ajuster les tensions de chauffage des cathodes des TOP à 12 et 7 GHz afin d’assurer des durées de vie optimales.
Des modifications aux EPC sont finalement décidées et aboutissent à des interventions à partir du début de 1984, alors que le prototype de vol numéro un (PV1) et la charge utile du MV2 sont déjà intégrés. Il s’agit de modifier et d’ajouter des résistances de réglage. Au total, vingt ATOP seront modifiés de janvier à juin 1984, dont neuf au niveau du satellite intégré, sans démontage total de l’équipement.
Ce n’est qu’au prix de rigoureuses procédures établies avec le plus grand soin que ces modifications peuvent être effectuées sans incident notable.
L’intégration
Deux types d’intégration sont effectués par ATES (Alcatel Espace):
– la préintégration du sous-système télémesure-télécommande, avant livraison au maître d’œuvre MATRA. Cette opération, pour laquelle le Service ES a acquis une bonne expérience dans les programmes précédents, ne donnera lieu à aucun commentaire particulier;
– l’intégration de la charge utile de télécommunications, qui constitue un pas nouveau dans l’expansion du domaine de compétences d’ATES.
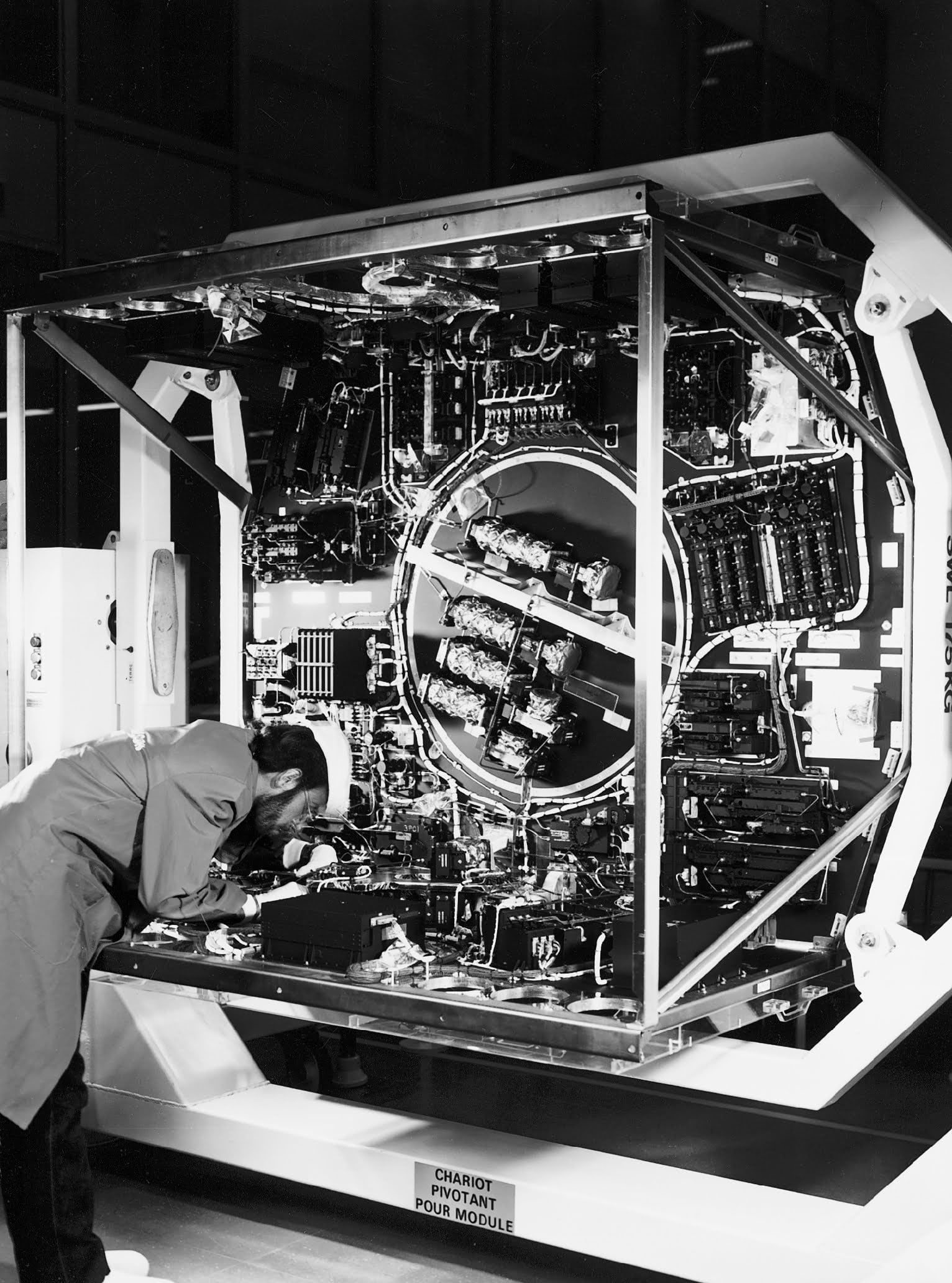
La charge utile de Telecom 1
Dans le programme précédent, Symphonie, les premières préintégrations des charges utiles ont été dirigées par Siemens pour le MI et le MV1, avec la participation de représentants de Thomson (DSP), alors que Thomson a ensuite intégré les charges utiles du MQ et du MV2 avec la participation de Siemens. Les intégrations finales dans le satellite ont ensuite été conduites à l’Aérospatiale par des équipes de plusieurs sociétés.
Pour Telecom 1, ATES reçoit du maître d’œuvre MATRA, pour chaque modèle, la partie de la structure devant supporter la charge utile, et prend l’entière responsabilité de l’intégration de cette dernière.
L’expérience récemment acquise dans le programme TDRSS pour la réalisation et la mise en œuvre de bancs de tests automatiques est mise à profit, cette fois au niveau d’une charge utile complète.
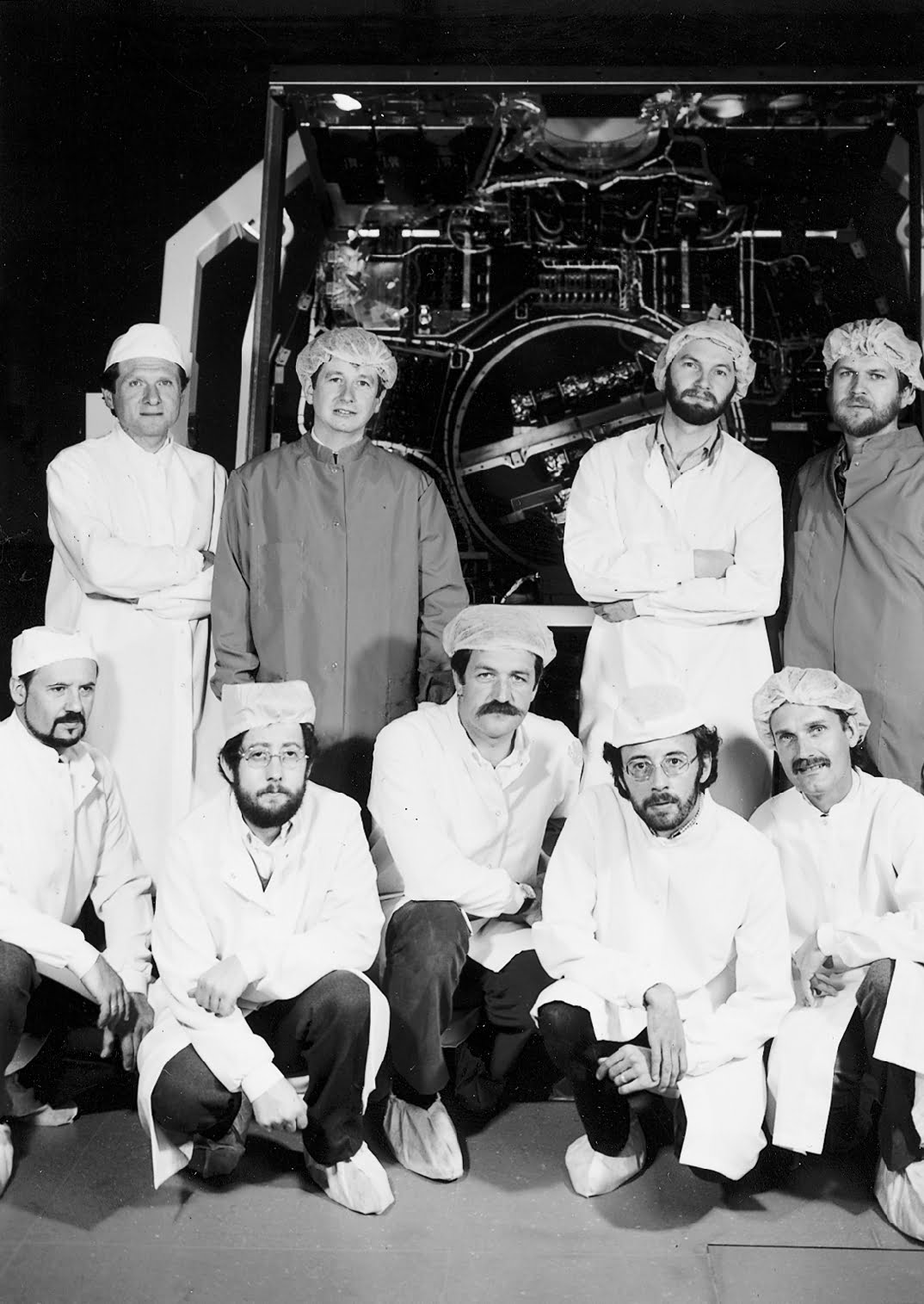
L’équipe d’intégration de Telecom 1
C’est à Philippe Gsell, qui a fait ses premières armes dans l’intégration de Symphonie, qu’est confiée la responsabilité de l’intégration, tandis que Jean-Claude Lestriez, qui a eu la charge des essais des récepteurs de TDRSS, dirige la conception et la mise en œuvre des bancs de tests.
Une autre innovation est expérimentée à l’occasion de Telecom 1: le modèle de qualification (MQ), qui, dans la plupart des programmes précédents, n’était plus utilisé après avoir subi les essais dits de qualification, doit, dans le programme Telecom 1, être utilisé comme modèle de vol, avec le nom de prototype de vol numéro un (PV1) après avoir subi, autant que nécessaire, une remise en état après les essais de qualification.
Cette procédure, destinée à faire l’économie d’un modèle, se généralisera dans la plupart des programmes ultérieurs.
Les livraisons et les lancements
La charge utile du PV1 est intégrée à Toulouse à partir de juin 1982 et livrée à MATRA le 9 juillet 1983.
Le satellite Telecom 1A est lancé de Kourou le 4 août 1984. Pour les autres modèles, les dates sont les suivantes:
– intégration de la charge utile du MV2 à Toulouse: juillet à décembre 1983;
– lancement de Telecom 1B: 8 mai 1985;
– intégration de la charge utile du MV3 à Toulouse: janvier 1984 à février 1985;
– lancement de Telecom 1C: 11 mars 1988.
En raison de la longue durée du programme, plusieurs chefs de projet successifs assumeront cette responsabilité pour la charge utile. Après Maurice Dumas, qui dirige la phase B à partir d’avril 1979, Philippe Blanchet prend la direction, de novembre 1979 à octobre 1981. Il est remplacé en octobre 1981 par Bruno Blachier auquel succéderont Jacques Beaucher de novembre 1982 à mai 1985, puis Pierre Jaubert de mai 1985 à la fin du programme, après le lancement de Telecom 1C, en 1988.
La vie en orbite
Pour chacun des trois modèles de vol, les opérations de recette en orbite permettent de constater des performances conformes aux spécifications, à quelques détails près.
Cependant, pour le premier modèle, Telecom 1A, des incidents répétés font grand bruit. Environ une fois par jour après la mise sous tension des répéteurs, des disjonctions intempestives se produisent sur au moins un des ATOP à 7 GHz et, plus rarement, sur certains ATOP à 12 GHz.
Le phénomène causant ces interruptions est rapidement identifié comme étant le même qui avait causé des commutations intempestives sur le premier modèle de Symphonie: les surfaces conductrices du satellite ne sont pas équipotentielles, et les champs transitoires créés par des arcs électriques induisent des signaux parasites dans certains circuits de télécommande.
Après chaque interruption, quelques minutes sont nécessaires pour mettre en œuvre la séquence de remise sous tension du TOP concerné.
Le malheur veut qu’une haute personnalité de la Défense nationale exprime le désir d’utiliser un circuit téléphonique passant par Telecom 1A juste au moment où une disjonction vient de se produire. Le problème technique à résoudre est instantanément devenu une affaire d’État !
Pour Telecom 1A, il n’existe aucun remède. Pour les modèles suivants, le maître d’œuvre réalise les connexions nécessaires pour que la surface extérieure du satellite soit effectivement équipotentielle. À titre de précaution supplémentaire, on modifie certaines parties du câblage de la charge utile afin d’éviter la formation de boucles captant l’énergie parasite, et on dispose des filtres sur les connexions filaires à l’entrée des alimentations des TOP. Aucun incident de ce genre ne se produira sur Telecom 1B ni sur Telecom 1C.
Telecom 1A et Telecom 1C assureront tous deux leur service au-delà de leur durée de vie nominale de sept ans. Telecom 1B sera mis hors service le 15 janvier 1988 à la suite d’une panne survenue dans l’alimentation de son système de contrôle d’attitude.
Les premiers satellites de diffusion de télévision: TV-Sat-TDF 1, TELE X
Les premières idées
L’idée d’assurer la diffusion de programmes de télévision par satellites naît au début des années soixante. Ses perspectives de mise en œuvre sont alors limitées par la capacité des lanceurs disponibles.
Les puissances d’alimentation électrique nécessaires à bord des satellites entraînent pour ces derniers des masses très supérieures aux capacités d’emport des lanceurs de l’époque.
À CSF, dès 1963, Guy Plottin propose de tourner la difficulté en mettant en orbite un réflecteur passif formé d’un cataphote en forme de trièdre trirectangle, reportant ainsi le problème de la puissance d’émission vers un émetteur placé au sol. En 1966, à titre de contribution aux études organisées par le groupement d’industriels européens Eurospace, il propose une version améliorée du cataphote qui revêt, cette fois, une forme bisphérique. Ce cataphote est constitué de deux calottes sphériques concentriques, le diamètre de la calotte extérieure (20 mètres) étant supérieur à celui de la calotte intérieure (4,50 mètres).
L’ensemble peut être réalisé au moyen de structures lenticulaires gonflables ayant chacune une surface transparente et une surface réfléchissante.
Après deux réflexions sur la face concave du grand miroir, séparées par une réflexion sur la face convexe du petit miroir, le rayon émergent est parallèle au rayon incident quand le petit réflecteur est placé dans le plan focal du grand.
Un tel système peut assurer la diffusion d’un assez grand nombre de programmes sur une ou plusieurs zones, le centre de chaque zone desservie étant défini par la position de l’émetteur au sol qui lui est affecté.
Étant donné la puissance importante nécessaire pour l’émission à partir du sol, la diffusion peut difficilement toucher des récepteurs du type grand public. Il est envisagé d’assurer seulement la distribution ou la diffusion dite communautaire à destination de petites stations de réception collectives alimentant des réémetteurs locaux.
L’organisation Eurospace, mise en place par les industriels pour assurer la promotion des activités spatiales, est très active, durant la seconde moitié des années soixante, pour étudier les possibilités des satellites dans le domaine de la diffusion de programmes de télévision.
Thomson, CSF, puis Thomson-CSF participent à un groupe de travail affecté à ces études. Pendant plusieurs années, Jacques Chaumeron, de Thomson, en sera le Président.
Dans l’optique d’un lancement par le lanceur européen Europa II ou par d’éventuelles versions améliorées, le groupe passe en revue les possibilités techniques et économiques de systèmes de diffusion communautaire pouvant être suivis, au fur et à mesure des progrès techniques, de systèmes de diffusion vers des récepteurs individuels.
En 1967, un premier rapport, consacré à la fois aux télécommunications et à la télévision par satellites dans le cadre européen, passe en revue diverses solutions allant de satellites d’une masse en orbite de 150 à 200 kilos, lancés par Europa II et équipés chacun de deux répéteurs pouvant assurer une diffusion communautaire, jusqu’à des satellites de 400 kilos, mis en orbite par un futur lanceur que l’on espère devoir être disponible vers 1973-74, et capables d’assurer, en modulation de fréquence, une diffusion vers des récepteurs individuels d’un prix raisonnable.
Les études d’Eurospace dans le domaine se poursuivent pendant les années soixante-dix, tenant compte, progressivement, des progrès réalisés ou prévisibles dans l’ensemble des techniques spatiales. Henri Brun sera le principal participant délégué par Thomson-CSF au cours de ces années.
Les premiers contrats d’études
Dans le courant des années soixante-dix, le CNES et l’ESRO, puis l’ESA, font effectuer par l’industrie des études de faisabilité de systèmes de diffusion de télévision par satellites.
Au début de 1972, un bureau de programme pour les télécommunications est créé à l’ESTEC, centre technique de l’ESRO.
Dès le mois de mai 1972, le Service Systèmes du Département ESA de Thomson-CSF obtient de cette organisation un marché pour «l’étude de l’adaptation du satellite européen de télécommunications à la télévision directe».
Le CNES n’est pas en reste et, en 1973 et 1974, le même Service Systèmes fait, pour cet organisme, une «étude paramétrique d’une charge utile pour satellite de télévision éducative».
À partir de 1976, certains événements se précipitent. L’Aérospatiale, au nom du consortium Cosmos, remet à l’ESA une proposition non sollicitée pour l’étude et la réalisation d’un satellite de diffusion directe de télévision, baptisé Heavy-Sat, ou, plus brièvement, H-Sat. Ce satellite, d’une masse au lancement de 1 500 kilos, doit disposer d’une puissance d’alimentation proche de 2 kilowatts permettant d’alimenter quatre émetteurs de 200 watts chacun. La bande Ku est envisagée et l’émission à partir du satellite doit se faire en modulation de fréquence.
Ces deux dernières caractéristiques techniques correspondent à ce que l’on connaît à l’époque des préparatifs en cours pour la Conférence Administrative Mondiale des Radiocommunications (CAMR ou WARC).
Tenue en 1977, cette conférence attribue aux pays européens des positions orbitales et des canaux de fréquences dans la bande 17,3-18,1 GHz pour les liaisons montantes et dans la bande 11,7-12,5 GHz pour les liaisons descendantes. C’est ainsi que la France et l’Allemagne obtiennent la position orbitale à 19° ouest avec chacune cinq canaux. À la différence des satellites de télécommunications, la diffusion, sur la liaison descendante, est prévue, pour des raisons pratiques évidentes, en polarisation circulaire.
Suite à la proposition de l’Aérospatiale, qui suggère que le satellite H-Sat soit lancé avec le quatrième tir de qualification de la fusée Ariane, l’ESA fait effectuer quelques études préparatoires.
Le Département DSP participe à ces études et réalise un avant-projet de charge utile à trois canaux équipés chacun d’un tube à ondes progressives Thomson-CSF de 230 watts. Une maquette «en bois» de cette charge utile est exposée au Salon de l’aéronautique et de l’espace au Bourget en 1979.
Fin 1976, l’ESA lance un appel d’offres pour la réalisation du satellite. En juillet 1977, le consortium Cosmos est retenu pour cette réalisation.
Cependant, également dans le courant de l’année 1977, on apprend que le gouvernement allemand, fortement soutenu par ses industriels nationaux et en particulier par MBB, envisage de faire cavalier seul pour la réalisation d’un satellite national de diffusion de télévision. Les raisons politiques de cette attitude sont, selon toute probabilité, qu’un tel satellite, sous contrôle national, pourrait diffuser des programmes à destination de l’Allemagne de l’Est.
Avant que ce programme n’ait reçu un nom officiel, certains l’ont baptisé «Die grosse Platform».
Le programme TV-Sat-TDF I
L’accord franco-allemand
En 1979, l’Allemagne annonce son refus de participer au financement du programme H-Sat de l’ESA. Étant donné l’importance de la contribution qui est attendue de ce pays, cette annonce signifie la mort du programme, qui sera repris par la suite avec des participations différentes, dont les plus importantes seront celles du Royaume-Uni et de l’Italie, sous le nom d’Olympus, satellite expérimental qui sera lancé en 1990.
L’Allemagne ayant proposé à la France une association pour réaliser son programme, cette dernière accepte en octobre 1979.
C’est le 29 avril 1980 qu’est signée, entre les gouvernements français et allemand, la convention, publiée au Journal officiel du 20 avril 1982, instituant une coopération entre les deux pays en matière de satellites de radiodiffusion.
Cette coopération porte sur «la mise au point, la réalisation et la mise à poste ainsi que l’expérimentation préopérationnelle de deux satellites de radiodiffusion», un français et un allemand, de conceptions identiques.
Chaque satellite doit être exploité à 19° ouest avec trois canaux de radiodiffusion et doté d’une réserve suffisante, l’un étant conçu pour le territoire de la RFA et l’autre pour le territoire français, de manière à répondre aux décisions prises par la CAMR de 1977.
La convention donne en outre des précisions sur ce que doit être l’organisation industrielle chargée de réaliser les satellites.
Les satellites doivent être commandés à un prix forfaitaire avec intéressement à un consortium industriel franco-allemand dont le siège doit se trouver en RFA.
La coordination du projet de satellite dans son ensemble doit être assurée par un groupe intégré franco-allemand sous la direction d’une entreprise allemande, et celle des deux charges utiles par un groupe intégré franco-allemand sous la direction d’une entreprise française.
Les travaux doivent être répartis entre des entreprises allemandes et françaises sur la base d’un retour financier de 54 % pour l’Allemagne et de 46 % pour la France.
Du côté du client, la supervision du programme doit être assurée par un comité de direction de quatre membres, deux Allemands et deux Français, prenant ses décisions à l’unanimité, et présidé alternativement par un Français et un Allemand. Ce comité doit désigner un secrétariat exécutif, basé à Munich, présidé par un Français ayant pour adjoint un Allemand et chargé de la gestion courante du programme.
La convention précise également que, pour des satellites opérationnels réalisés ultérieurement soit pour les besoins français ou allemands, soit pour l’exportation, l’organisation industrielle commune sera fondée sur la parité (rapport 50-50), pour les montants financiers, des quotes-parts respectives des travaux et des risques financiers.
Un échange de lettres datées du 22 septembre 1981 entre les deux gouvernements donne plus de détails sur les modalités de cette coopération ultérieure qui sera mise en œuvre pour les modèles supplémentaires TV-Sat 2 pour l’Allemagne et TDF 2 pour la France, ainsi que pour le satellite TELE X réalisé pour la «Swedish Space Corporation».
Une annexe technique à la convention précise diverses données telles que, entre autres, les canaux de fréquences, les polarisations, les zones de couverture et les puissances isotropes rayonnées équivalentes (PIRE).
Quant à l’annexe financière, elle fixe les montants totaux plafonds des contrats forfaitaires à conclure:
– le gouvernement français prend à sa charge 555 millions de francs français destinés à son industrie, plus les 4/54 du montant des travaux effectués par l’industrie allemande, dans la limite de 4/54 de 281 millions de deutsche Mark;
– le gouvernement allemand prend à sa charge les 50/54 du montant des travaux effectués par son industrie, dans la limite de 50/54 de 281 millions de deutsche Mark.
Il va sans dire que ce partage étant basé sur la parité franc français-deutsche Mark au moment de la signature de l’accord, les dévaluations du franc français qui ont lieu à partir de 1982 amèneront quelques perturbations dans la rigueur du partage.
La coopération prévue, comme l’indique le préambule de la convention, doit faire suite à celle mise en œuvre pour le programme Symphonie et, pour cette raison, on peut constater une certaine symétrie par rapport à ce programme: par exemple, le consortium industriel CIFAS, qui a construit Symphonie, ayant son siège en France, celui qui sera chargé du programme TV-Sat-TDF 1 devra avoir son siège en Allemagne. La même symétrie est respectée pour la direction et l’implantation géographique des groupes de projet industriels.
Les premières opérations chez les industriels
Dès 1979, alors que la convention franco-allemande est encore en négociation, le CNES et TDF consultent les industriels français pour la réalisation du satellite TDF 1.
En novembre 1979, Aérospatiale et Thomson-CSF remettent des propositions, respectivement pour le satellite et pour sa charge utile.
Le 3 avril 1980, le ministre français de l’Industrie, André Giraud, envoie au Président de chacune des sociétés une lettre lui annonçant que sa proposition est retenue et lui donnant des instructions pour la future coopération franco-allemande, non seulement dans la réalisation des premiers satellites dits «préopérationnels», mais aussi pour celle des satellites suivants dits «opérationnels», ainsi que d’éventuels satellites réalisés pour l’exportation. Pendant ce temps, l’organisation industrielle se met en place.
Parmi les membres de l’ancien consortium CIFAS, la société Siemens a décidé, vers la fin des années soixante-dix, de ne plus s’intéresser au domaine des satellites. Parmi les autres membres, l’Aérospatiale, déjà initiatrice du projet H-Sat, la société allemande MBB et la société belge ETCA ont créé en 1979 une société à responsabilité limitée de droit allemand (GmbH) baptisée Eurosatellite.
Lorsque les perspectives d’un programme franco-allemand se précisent, des pourparlers sont engagés avec les deux anciens partenaires électroniciens du programme Symphonie: AEG-Telefunken et Thomson-CSF.
Ces pourparlers aboutissent à l’élargissement d’Eurosatellite GmbH à ces deux nouveaux membres. Cette nouvelle organisation est notifiée aux deux gouvernements en février 1980.
Les nouveaux statuts d’Eurosatellite sont signés en novembre 1980 avec les participations suivantes:
– AEG-Telefunken: 24 %
– Aérospatiale: 24 %
– MBB: 24 %
– Thomson-CSF: 24 %
– ETCA: 4 %
En cours de programme, ANT succède à AEG-Telefunken. Le gérant (Geschäftsführer) d’Eurosatellite est Rolf Arnim de MBB, assisté d’un représentant de chacune des principales sociétés membres:
– M. Chognot (Aérospatiale), Directeur Technique;
– Roger Durand (Thomson-CSF), Directeur Commercial;
– M. Koerner (AEG), Directeur Administratif et Financier.
Rolf Arnim assurera la gérance jusqu’à la fin du programme TELE X qui constituera la dernière activité réelle du groupement.
Les sociétés membres travaillent pendant une bonne partie de l’année 1980 à mettre au point les détails de l’organisation industrielle et une proposition d’ensemble pour les satellites français et allemand conformément au cahier des charges reçu en août 1980.
Dès octobre 1980, une difficulté majeure survient: compte tenu de spécifications particulièrement exigeantes, le devis global annoncé par Eurosatellite s’élève à environ 650 millions de deutsche Mark, alors que le budget prévu par la convention franco-allemande est de 520 millions.
Après avoir annoncé ce chiffre aux organismes clients, on recherche des économies. Pour Thomson-CSF, le principal problème se trouve au niveau des émetteurs. Afin d’avoir des marges de puissance confortables, et compte tenu des connaissances de l’époque sur les tubes à ondes progressives, TDF a prévu l’utilisation, dans chaque canal, de deux TOP en parallèle.
Une importante économie est possible en utilisant un seul TOP par canal, au prix d’un certain effort de développement pour obtenir une puissance de 260 watts par tube, ainsi qu’avec certaines autres améliorations portant sur les antennes et les guides d’ondes.
Le problème de la longueur des guides d’ondes fait couler beaucoup d’encre. Dans son projet initial de satellite, Aérospatiale a prévu des antennes dont les réflecteurs occupent, pour le lancement, une position plaquée sur les parois latérales du satellite et se déploient en orbite selon une configuration dite «en oreilles de lapin».
Cette configuration a la faveur de Thomson-CSF car elle permet de placer les sources d’antennes sur les arêtes du parallélépipède constituant le satellite, rendant ainsi minimales les longueurs de leurs guides d’alimentation et réduisant les pertes de puissance.
Lors des premiers contacts techniques avec les industriels allemands en vue d’aboutir à un projet commun, les représentants de MBB proposent une configuration très différente. En orbite, les réflecteurs d’antennes sont fixés sur la face du satellite orientée vers la Terre, ce qui impose de placer les sources d’alimentation au sommet d’une tour, allongeant ainsi les guides d’ondes de près de deux mètres. Les représentants de Thomson-CSF font savoir que si cette configuration peut satisfaire les mécaniciens, elle sacrifie par contre les performances d’émission et de réception de la charge utile, qui doit pourtant assurer la mission essentielle du satellite.
Au cours d’une réunion très animée tenue à Cannes, les représentants d’Aérospatiale finissent par accepter la configuration proposée par MBB, qui est donc imposée par les avionneurs malgré les protestations des responsables de la charge utile. Cette décision, qui rend les spécifications de PIRE beaucoup plus difficiles à tenir, sera la source de tensions et de polémiques pendant toute la phase de définition du satellite et ne facilitera pas l’exercice de réduction des coûts.
Après quelques semaines d’efforts, le 19 décembre 1980, la proposition d’Eurosatellite, conforme aux objectifs de prix, est remise aux organismes clients.
La charge utile du satellite doit toujours comprendre cinq canaux, quatre d’entre eux sont équipés d’un seul TOP, le cinquième de deux TOP en redondance afin de tester le dispositif de commutation sur le tube de secours. Trois canaux doivent pouvoir fonctionner simultanément.
Une autre difficulté survient alors. La proposition du 19 novembre 1980 indique des délais de réalisation très supérieurs à ceux qui ont été annoncés dans un document préliminaire remis en mars de la même année. Il en résulte de nouvelles négociations qui retardent l’engagement que les clients ont promis de prendre pour permettre le lancement des approvisionnements à longs délais.
Finalement, le travail des industriels peut commencer officiellement à la réception d’une lettre d’intention adressée à Eurosatellite le 24 mars 1981.
Le 17 août, un précontrat est signé sur la phase de définition qui aboutit, le 17 novembre, à la remise par Eurosatellite d’une seconde proposition révisée et conforme à l’objectif de prix de 520 millions de deutsche Mark.
Les 16 et 17 novembre, à Munich, a lieu la «System Preliminary Design Review» (PDR) au cours de laquelle les représentants du groupe de projet industriel (IPT, Integrated Project Team), dirigé par Kuno Schneider de MBB, présentent la conception du satellite à un jury (board) composé de six représentants des administrations clientes et deux représentants de l’industrie, dont Jacques Chaumeron pour Thomson-CSF.
Cette cérémonie, qui réunit cent cinq personnes, et à la suite de laquelle cent trente-deux questions écrites demandant des justifications sont posées à l’IPT, ne fait grâce d’aucun détail, au point que l’un des participants demande s’il ne devient pas nécessaire de «remonter à la loi d’Ohm» pour justifier certaines solutions.
En quelques semaines, l’IPT répond de façon satisfaisante à la plupart des questions, et la préparation du contrat final peut se poursuivre.
Ce dernier est signé par les diverses parties prenantes le 15 juillet 1982 en Allemagne et le 18 juillet en France.
La vie du projet à DSP
En 1979, lorsque les perspectives du programme qui sera appelé TDF 1, puis TV-Sat-TDF 1, se précisent, le Département DSP est en pleine expansion car il a fallu, à partir d’effectifs devenus «squelettiques» au cours de la «traversée du désert», recruter et former aux techniques spatiales de nouveaux ingénieurs et techniciens pour s’attaquer au programme Telecom 1. Si TDF 1 est le bienvenu, car il promet d’assurer la vie du Département au-delà de Telecom 1, il aurait été cependant souhaitable, afin de «lisser» la courbe d’effectifs, qu’il arrivât au moins un an plus tard.
Les premiers travaux techniques de préparation des propositions sont exécutés par le Service Systèmes SS1 dirigé par Maurice Dumas.
Il faut ensuite constituer un groupe de projet particulier au programme. Sa direction est confiée à Jean-François Primard, jusque-là adjoint de Marcel Palazo à la tête du Service Hyperfréquences (HY). Jean-François Primard, qui a été dix ans plus tôt responsable à DSP du programme Helios, satellite scientifique allemand, a ainsi l’occasion de réutiliser son expérience des relations avec les sociétés allemandes.
Le manque d’effectifs et la priorité allouée par la Direction de la Division DFH au programme Telecom 1 rendent très difficile la constitution du groupe de projet.
En septembre 1980, l’IPT, groupe de projet intersociétés, est constitué à Munich, et Thomson-CSF doit y être représentée. Aucun volontaire ne se présente parmi l’effectif de DSP.
Deux «volontaires» sont finalement désignés successivement, à titre provisoire: Georges Blondin dans l’équipe technique, avec le titre de «Deputy Project Manager», auquel succédera Daniel Samsoen pendant quelque temps, avant l’arrivée de Pierre de Château-Thierry, qui assurera la fonction à titre permanent de janvier 1983 à fin septembre 1985. Marcel Palazo prendra ensuite la relève jusqu’à la fin. Jean-Louis Morand renforcera l’équipe de juillet 1983 à septembre 1985. Par contre, dans l’équipe «qualité», Hubert de Pavlowsky séjournera à l’IPT beaucoup plus longtemps, de février 1982 à la fin du programme en juin 1986.
Les responsabilités de DSP et, à partir de 1982, de la Division Espace (DES), puis d’ATES à partir de 1984, sont les suivantes:
– coordination de la conception des charges utiles française et allemande;
– développement, fabrication et intégration de la charge utile française;
– développement, fabrication, intégration du sous-système télémesure-télécommande pour tous les satellites.
La fabrication d’une partie des équipements est sous-traitée à des sociétés suédoises (SAAB et Ericsson), belge (ETCA) ainsi qu’à ANT pour une partie des répéteurs et à l’Aérospatiale pour les réflecteurs d’antennes. D’autre part, DSP fournit certains équipements à ANT pour la charge utile de TV-Sat.
L’approvisionnement des TOP de puissance pour les émetteurs donne lieu à diverses péripéties car la Division Tubes de Thomson-CSF s’y trouve en concurrence avec la société allemande AEG-Telefunken.
Pour les satellites allemands, une puissance de 150 watts est suffisante pour obtenir la PIRE demandée. Par contre, pour le satellite français, on arrive aux limites de ce que la technologie de l’époque peut obtenir. Alors qu’AEG déclare être prête à s’engager sur une puissance de 260 watts, Thomson-CSF refuse, à juste raison, de promettre une puissance supérieure à 230 watts.
Cette position est à l’origine de sévères discussions avec les représentants de l’administration cliente TDF qui souhaite obtenir une PIRE la plus proche possible du maximum autorisé par la CAMR de Stockholm. Thomson-CSF s’efforce de justifier sa position par une certaine prudence devant les risques inhérents à la mise en œuvre de tubes entièrement nouveaux, prudence qui devrait être largement compensée à brève échéance par les progrès très rapides attendus des performances des matériels de réception au sol.
La validité de cette position sera, par la suite, largement démontrée: les tubes de puissance, quelle que soit leur origine, auront quelques problèmes en orbite, et les satellites européens de diffusion de télévision de la génération suivante rempliront leurs missions sans difficulté avec des tubes d’environ 100 watts.
L’utilisation pour les cinq canaux de tubes de forte puissance, dont quatre peuvent fonctionner simultanément, pose de nouveaux problèmes pour le contrôle thermique du satellite. Ces problèmes sont résolus par l’utilisation de caloducs très performants.
La fourniture des TOP est également répartie entre AEG et Thomson-CSF, leurs alimentations étant toutes fournies par ANT.
ATOP de 230 Watts (Thomson-CSF) en bas et de 260 Watts (AEG) en haut et alimentations (ANT) à droite.
Le sous-système répéteurs assure les fonctions suivantes:
– séparation, à 17-18 GHz, des signaux de télévision et des signaux de télécommande, et conversion des signaux des cinq canaux TV à 12 GHz;
– séparation et amplification des cinq canaux TV;
– amplification de puissance des signaux de chacun des cinq canaux par des ATOP à collecteurs rayonnants délivrant 230 watts (Thomson-CSF) ou 260 watts (AEG), et association des signaux à ceux de télémesure. Six ATOP sont installés, dont l’un devant être utilisé en redondance froide sur un canal.
Le sous-système antennes comprend deux antennes à réflecteurs en fibres de carbone assurant, l’une la réception des signaux de TV et de télécommande dans la bande des 17-18 GHz, l’autre l’émission des signaux de TV et de télémesure dans la bande des 12 GHz.
Afin d’optimiser la répartition de la puissance émise sur la zone à couvrir, l’antenne d’émission fournit un faisceau formé au moyen d’une source multiple et d’un réflecteur elliptique. Le sous-système assure également la réception, à 11,2 GHz, du signal d’une balise terrestre utilisé pour la correction automatique du pointage des antennes.
Comme il a été dit plus haut, les sources d’alimentation des antennes sont placées au sommet d’un pylône érigé sur la face du satellite orientée vers la Terre, et les réflecteurs, plaqués le long du pylône lors du lancement du satellite, sont ensuite déployés sur cette face de manière à orienter leurs faisceaux vers la Terre.
Le sous-système TM-TC utilise un transpondeur en bande S et une antenne omnidirectionnelle pendant les opérations de mise en orbite, ainsi que pour la localisation et le maintien en station. Lorsque le satellite est en station, les signaux de TM-TC sont acheminés via les répéteurs.
Sous l’égide du groupe de projet dirigé initialement par Jean-François Primard, tous les services techniques de DSP participent au programme:
– le Service Hyperfréquences (Pierre de Bayser puis Pierre Fraise);
– le Service Antennes (Bruno Vidal Saint-André);
– les services EN (Michel Hayard) et TC (Jacques d’Hollander).
Le transfert de DSP à Toulouse amène quelques perturbations dans le déroulement des travaux. En particulier, le chef de projet, Jean-François Primard, qui préfère rester en région parisienne, doit être remplacé en 1982 par Daniel Samsoen puis par Jean-Louis Lacaze jusqu’en 1985.
Quant à la réalisation de TDF 2, elle est dirigée à partir de 1984 par Jean-François Gambart, auquel succéderont Xavier Rozec, de novembre 1987 au milieu de 1988, puis Marcel Barre jusqu’au lancement.
Afin de limiter les perturbations, il est décidé que, dès leur début, les travaux d’intégration de la charge utile de TDF 1 seront effectués à Toulouse. C’est donc ce programme qui, avec SPOT, inaugure la salle d’intégration de Toulouse. La charge utile de Telecom 1, dont l’intégration a commencé en région parisienne puis au CNES, n’y sera transférée que plus tard.
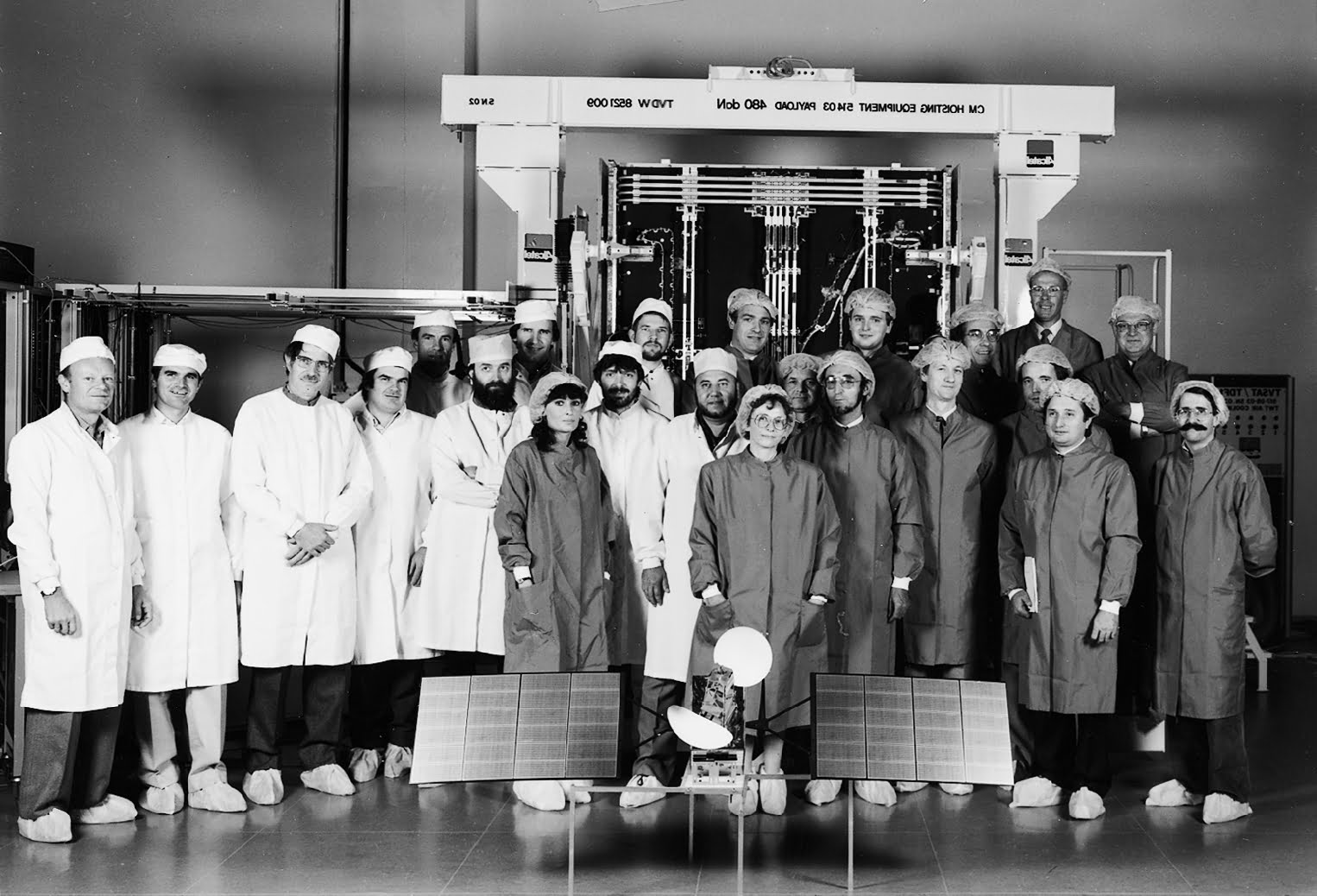
L’équipe d’intégration de TDF 1 devant la charge utile et derrière une maquette du satellite
Les difficultés rencontrées
Les principales difficultés techniques rencontrées au cours du développement portent, comme on pouvait s’y attendre, sur les circuits opérant avec des puissances élevées, les TOP, leurs alimentations, ainsi que des circuits auxiliaires tels que les isolateurs.
Par contre, la technologie des réflecteurs d’antennes en fibres de carbone, et de leurs supports, qui a été mise au point pour Telecom 1 avec quelques difficultés, ne pose aucun problème pour TDF-TV-Sat.
Mais il faut très vite faire face à une impossibilité pour la Division Espace de tenir le calendrier prévu. En effet, les perturbations liées au déménagement à Toulouse, à la pénurie de techniciens compétents et aux conséquences de la priorité donnée à Telecom 1 amènent au constat qu’il faudra un an de plus que prévu. Gérard Coffinet décide, sur la proposition du chef du groupe de projet, Daniel Samsoen, de suivre le calendrier réaliste mais de tout faire pour ne pas glisser davantage.
Finalement, les délais officiels annoncés par Eurosatellite glisseront également en raison des difficultés rencontrées par les autres sociétés et, à la fin, Alcatel Espace, qui aura respecté son programme, sera en avance sur les autres.
L’organisation complexe du management de ce projet est, sans doute, une raison essentielle au glissement d’ensemble du calendrier. Malgré le dynamisme de Pierre Madon, de l’Aérospatiale, qui anime Eurosatellite, et la bonne volonté du Directeur du projet, Kuno Schneider, Eurosatellite se heurte à une équipe cliente de trente-cinq personnes françaises et allemandes (IPT) qui ne peut prendre de décision importante sans l’accord unanime de quatre administrations (TDF et CNES pour la France, DFVLR et Deutsche Telekom pour l’Allemagne). De plus, cela rend très difficile la négociation du moindre avenant, en particulier lorsque les coûts augmentent, ce qui est une conséquence inéluctable de l’allongement du programme.
Enfin, lorsqu’en 1984 DSP pense avoir, grâce à l’amélioration de la situation industrielle pilotée par Michel Chaussedoux, maîtrisé la réalisation, la situation des TOP de Thomson-CSF et d’AEG-Telefunken devient de plus en plus préoccupante, d’autant plus que les alimentations fournies par ANT, devant s’adapter à deux tubes assez différents, n’arrivent pas à être mises au point. C’est seulement en 1985 qu’un accord entre Gérard Coffinet et Jacques Caumartin, Directeur de la Division Tubes de Thomson-CSF, permet de régler le contentieux entre les deux entités, les tubes de Thomson-CSF, qui ont failli être retirés du programme au profit de ceux d’AEG-Telefunken, montrant en définitive, après beaucoup d’efforts, qu’ils sont au moins aussi bons, sinon meilleurs, que les tubes allemands. Les problèmes des TOP sont la raison essentielle des résultats encore négatifs de la Division en 1984 car il faut faire des provisions substantielles.
Il faut également noter que l’absence de décision gouvernementale sur TDF 2 en 1985 est la deuxième cause essentielle, après l’abandon d’Athos, du lancement du plan social d’ATES. Il faut à ce sujet remercier le maire de Toulouse, Dominique Baudis, qui soutiendra toujours Alcatel Espace dans cette période difficile et adressera une lettre à Laurent Fabius, alors Premier ministre. Mais le changement de Gouvernement, début 1986, retardera encore la décision, prise enfin par Jacques Chirac en 1987 (voir Tevespace).
Les péripéties des lancements
Du côté français, le programme TDF 1-TDF 2 a été dirigé par le CNES et par TDF, ces deux administrations ayant associé leurs compétences et TDF étant l’utilisateur final. La motivation initiale a été de permettre, en premier lieu, la couverture à 100 % du territoire français par les chaînes existantes: cette couverture, réalisée jusque-là avec des faisceaux hertziens et des réémetteurs, n’est en effet pas complète et ne pourrait le devenir qu’au prix de l’installation d’un nombre prohibitif de réémetteurs dans des zones à faible densité de population. Une autre motivation, qui voit de nos jours son plein développement, est de pouvoir pallier, grâce aux satellites, la saturation du plan de fréquences des moyens terrestres et pouvoir ainsi diffuser de nouvelles chaînes.
Sous l’impulsion de la DGT (Direction Générale des Télécommunications), qui a toujours manifesté des réserves vis-à-vis du programme, le ministère des PTT, dès la fin de 1981, annonce sa préférence pour la diffusion par câble, qui pourrait se développer rapidement grâce à la mise en œuvre des fibres optiques.
D’après certains organes de presse, cette décision sonne le glas, en France, de la diffusion par satellites, d’autant plus que TDF est désormais sous le contrôle du ministère des PTT.
Pour les industriels d’Eurosatellite, et surtout pour les industriels français, une question essentielle se pose: TDF 1 et TDF 2, à supposer que leur construction se poursuive jusqu’au bout, seront-ils jamais lancés ?
Cette polémique, largement reprise par la presse pendant plusieurs années, ne contribuera pas à soutenir le moral des équipes de DSP affectées au programme. Elles ont malgré tout le réconfort de constater que ce genre de controverse n’existe pas du côté allemand, où les motivations sont très différentes.
Une autre polémique vient s’ajouter à la première lorsqu’on commence à discuter des standards à utiliser pour une future télévision à haute définition (standard japonais, américain ou européen ?). Ce nouveau débat fournit quelques arguments aux partisans des satellites qui doivent, dans leur esprit, aider à promouvoir le standard D2 Mac, proposé pour l’Europe.
Finalement, le satellite allemand TV-Sat 1 est mis en orbite le 20 novembre 1987. Malheureusement, l’un de ses panneaux solaires ne se déploie pas et provoque une fin prématurée de la mission.
Avant le lancement suivant qui doit être celui de TDF 1, on passe quelques mois à analyser le défaut afin d’éviter qu’il ne se reproduise.
TDF 1 est enfin lancé le 28 octobre 1988 et recetté en orbite vers la fin de la même année. TV-Sat 2 est mis en orbite le 9 août 1989.
Il reste à décider du lancement, ou non, de TDF 2, et là encore surviennent quelques péripéties.
Si, à l’origine, les autorités françaises ont défini le programme comme devant aboutir à des satellites expérimentaux, l’idée d’en faire un système opérationnel, dont le fonctionnement serait garanti par la présence en orbite de deux satellites, a fait son chemin. Bien que cette orientation risque d’aboutir à des exigences allant au-delà de celles définies par le contrat passé aux industriels, ces derniers ne voient que des avantages à l’existence d’un système opérationnel qui permettrait de mettre en œuvre une télévision aux normes européennes.
Dès juillet 1986, la FIEE (Fédération des Industries Électriques et Électroniques) est intervenue auprès du Premier ministre pour insister sur l’importance d’un système national de diffusion par satellites.
Après le lancement de TDF 1, on organise une nouvelle campagne pour obtenir le lancement de TDF 2.
Le Gouvernement décide alors, début 1987, de transférer le contrat TDF 2 au bénéfice d’une société de commercialisation qui exploiterait les satellites TDF 1 et TDF 2 et dont le capital de 600 millions serait détenu pour moitié par les industriels et TDF, et pour l’autre moitié par divers opérateurs. La participation d’Alcatel Espace serait de 30 millions, comprise dans les 70 millions qu’apporteraient les industriels d’Eurosatellite. Un projet de société est élaboré courant mars 1987, dont les buts sont les suivants:
Exposé du projet Tevespace:
«L’opérateur technique a été chargé par le gouvernement français de mettre en place, avec la collaboration du CNES, l’ensemble des moyens nécessaires à l’exploitation d’un service de radiodiffusion directe par satellite […]»
«Il est projeté de constituer une société Tevespace, en vue de l’exploitation de la ressource de diffusion disponible sur les deux premiers satellites du système de radiodiffusion directe dénommés TDF 1 et TDF 2 […]»
«TDF 2 sera de conception identique à TDF 1, et ce de manière à pouvoir assurer la redondance de TDF 1 en orbite.»
«L’opérateur technique doit mettre gratuitement à la disposition de Tevespace la ressource de diffusion disponible sur le premier satellite français de radiodiffusion directe par satellite.»
«Tevespace aura notamment pour mission de rassembler les concours techniques et financiers nécessaires à la réalisation, au lancement et à la promotion de TDF 2.»
«La mise en œuvre de la stratégie et la réalisation des objectifs nécessitent l’octroi à la société de capitaux propres de 600 millions de francs et de ressources financières, sous forme de prêts, de 1 200 millions de francs […]»
«Le parfait aboutissement est conditionné par la promulgation du décret imposant la norme D2 Mac Paquet et son utilisation sur les satellites TDF 1 et TDF 2 […]»
Ce projet étant a priori «franco-français», tous les partenaires européens d’Eurosatellite ne veulent pas y participer. Cette difficulté supplémentaire est levée par la constitution d’une société dénommée Eurosatellite France, au capital de laquelle doivent essentiellement participer l’Aérospatiale et Alcatel.
Ce montage volera en éclats quelques mois après; TDF 2 est définitivement commandé à la suite d’un arbitrage favorable au projet pris par le Premier ministre de l’époque, Michel Rocard. Le lancement du satellite ne peut intervenir que le 24 juillet 1990 par suite des incidents qu’avait connus Ariane en 1989. Ce retard, puis les incidents techniques décrits ci-dessus, sonne le glas pour cette génération de satellites de forte puissance et pour la norme D2 Mac Paquet.
Au cours de la vie des trois satellites TDF 1, TV-Sat 2 et TDF 2, quelques canaux sont perdus à cause de pannes des TOP. Ces incidents font grand bruit dans la presse. Il convient de préciser que, cependant, les obligations contractuelles des industriels, qui spécifient que chaque satellite doit être capable de fournir trois canaux en fonctionnement simultané, restent satisfaites. Chaque satellite est, en fait, utilisé pour une mission dépassant celle qui a été précisée aux industriels dans le cahier des charges initial. Par exemple, plus de trois canaux sont utilisés simultanément, et la zone de couverture est élargie. Par contre, l’utilisation de fortes puissances ne permet pas d’émettre en période d’éclipse, c’est-à-dire vers 3 heures du matin dans la zone desservie, ce qui a été considéré, à l’époque de la conception, comme un inconvénient mineur.
TELE X
Depuis 1979, les membres d’Eurosatellite suivent de très près les intentions des autorités suédoises en matière de satellites de télécommunications et de télévision.
Sous le nom de Nordsat, on parle beaucoup d’un futur satellite envisagé par l’administration suédoise des PTT avec l’éventuelle participation d’autres pays scandinaves.
Après diverses péripéties, l’action énergique du principal promoteur de l’idée, Fredrik Engstrom, aboutit en 1982 à la création d’une société nationale, sous tutelle ministérielle, la «Swedish Space Corporation» (SSC) qui est chargée d’exécuter le programme.
Plus tard, en 1983, un accord sera signé entre la Suède, la Norvège et la Finlande pour une participation de ces deux derniers pays au programme. Au titre de cet accord, les participations financières respectives seront de 82 %, 15 % et 3 %.
Il est prévu de lancer, tout au moins dans une première phase, un satellite expérimental, baptisé TELE X, sous la forme d’un prototype de vol (protoflight).
Le satellite doit fournir, sur une zone couvrant les pays scandinaves, un service de diffusion directe de télévision en accord avec les résolutions de la CAMR de 1977, ainsi qu’un service de transmissions de données et de vidéo.
Les industriels suédois SAAB et Ericsson, qui ont participé au programme TV-Sat-TDF 1 avec Eurosatellite, ont joué un rôle important dans la promotion du programme TELE X.
Eurosatellite, où Aérospatiale doit jouer le rôle de maître d’œuvre, soumet sa proposition à la SSC en juin 1982, et le travail peut commencer après la réception d’une lettre d’intention du client en octobre de la même année.
Après une revue préliminaire de la conception du satellite (PDR), tenue en juin-juillet 1983, le contrat principal est signé en août 1983.
Par rapport à la répartition des travaux adoptée dans TV-Sat-TDF 1, de plus grandes responsabilités ont été données, dans TELE X, aux industriels suédois. ATES, quoi que conservant à peu près la même part des travaux que dans TDF 1 dans les répéteurs, a dû partager la responsabilité de la charge utile avec Ericsson, laisser à cette dernière société le sous-système antennes et devenir sous-traitant de SAAB pour les matériels de télémesure-télécommande, en fournissant essentiellement le transpondeur en bande S.
Le contrat entre Aérospatiale et Ericsson pour la charge utile ayant été signé le 13 avril 1984, celui entre Ericsson et ATES pour la participation d’ATES est signé le 20 avril de la même année. Le contrat entre SAAB et ATES pour la participation au sous-système TM-TC est signé le 22 novembre 1984.
Un groupe de projet est constitué à ATES sous la direction de Jean Guéranger, qui accomplira cette mission jusqu’en avril 1986. Jean Ramis lui succédera jusqu’à la fin du programme.
Dans la charge utile qui est différente de celle de TDF 1, ATES assure la conception de l’ensemble des répéteurs.
Le sous-système répéteurs comprend six canaux, répartis comme suit:
– trois canaux, dont deux ou trois peuvent être activés simultanément, pour la diffusion de télévision;
– trois canaux équipés de linéariseurs destinés à compenser la distorsion introduite par les TOP, et dont deux peuvent être activés simultanément pour la transmission de données et de vidéo (un canal à large bande et un canal à bande étroite).
Le mode de fonctionnement nominal du sous-système est prévu pour quatre canaux simultanés, c’est-à-dire soit deux de TV plus deux de données, soit, si nécessaire, trois de TV plus un de données.
ATES y fournit l’ensemble de la partie réception à large bande jusqu’au démultiplexeur d’entrée, alors qu’ANT fournit les amplificateurs de canaux, les multiplexeurs de sortie et les amplificateurs à TOP, dont la totalité des tubes de 230 watts sont fournis par AEG-Telefunken. ATES étudie et réalise en plus les dispositifs linéariseurs de TOP qui s’avèrent nécessaires dans les canaux affectés aux transmissions de données.
Le sous-système antennes est entièrement étudié et fourni par Ericsson, les réflecteurs étant sous-traités à l’Aérospatiale.
TELE X doit desservir des régions situées à des latitudes élevées d’où le satellite est vu sous un faible angle d’élévation par rapport à l’horizon. La «chasse aux dixièmes de décibels» dans le bilan des liaisons descendantes y est donc beaucoup plus indispensable que dans le cas de TDF 1. C’est l’une des raisons pour lesquelles, afin de raccourcir les guides d’alimentation des sources d’antennes, Ericsson choisit de développer et réaliser des antennes du type «Cassegrain».
L’intégration du sous-système répéteurs est exécutée par ATES à Toulouse. Le transpondeur en bande S fourni par ATES pour le sous-système TM-TC est un modèle de série identique à ceux réalisés pour les autres programmes de la même époque (SPOT, Telecom 1,etc.).
L’ensemble des travaux de développement, de fabrication, d’intégration et d’essais exécutés à ATES ne donne lieu à aucun incident majeur.
TELE X est lancé le 2 avril 1989 et remplit intégralement la mission qui lui est assignée.
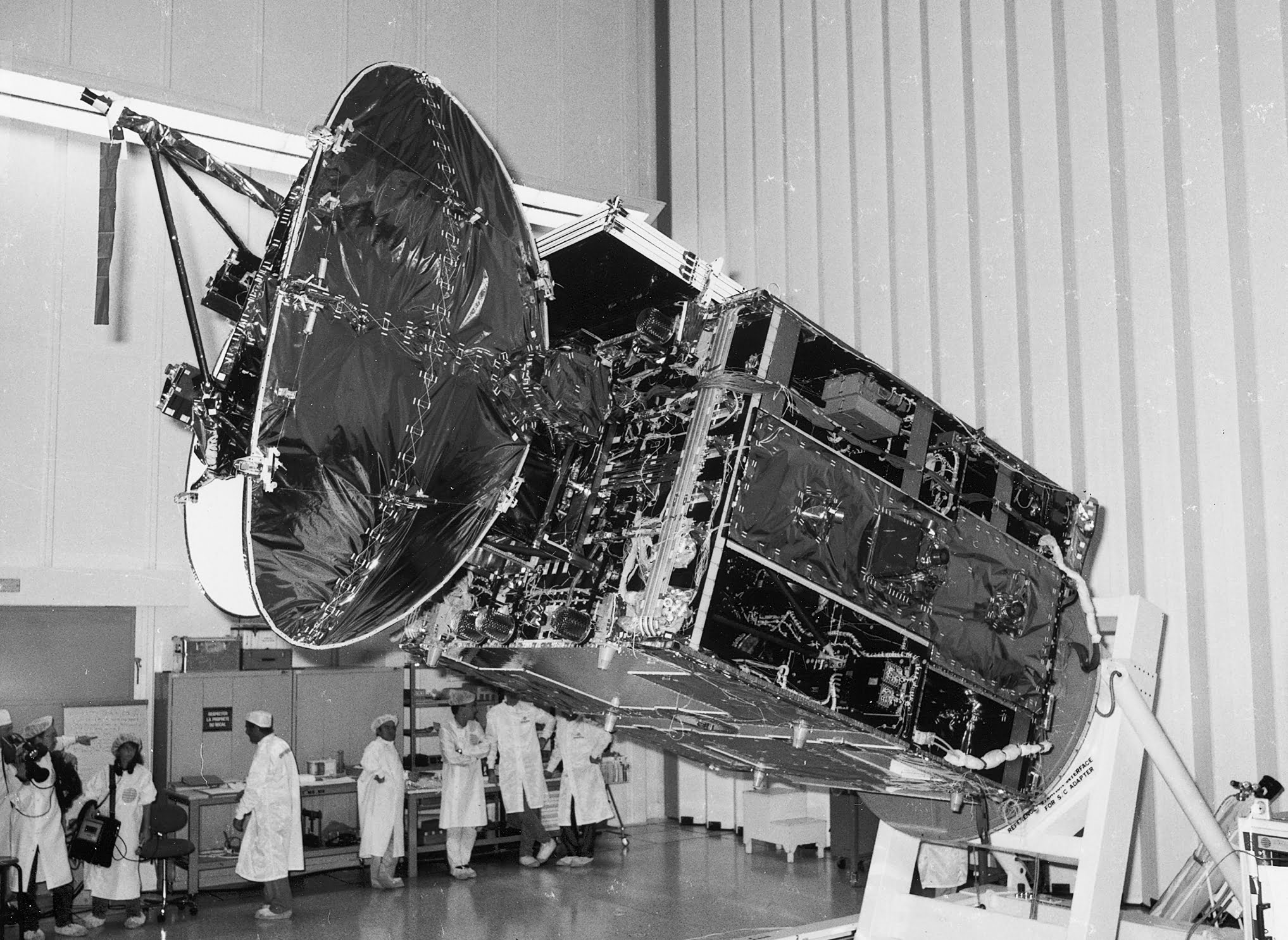
TELE X
Les satellites de télécommunications
Athos
À partir de 1982, la Direction de la Division Espace commence à examiner soigneusement ce que devra être la charge industrielle de la Division après la fin du programme Telecom 1.
Les équipements de la troisième et dernière charge utile de ce programme doivent être livrés aux équipes d’intégration à la fin de 1983.
Les importants effectifs mis en place pour réaliser Telecom 1, TDF 1 et, bientôt, Intelsat VI, risquent de se trouver en sous-charge à moyen terme s’il n’apparaît pas un autre programme qui permette une activité suffisante en attendant un éventuel programme Telecom 2.
L’idée germe de proposer un programme expérimental qui aurait le double avantage d’éviter la sous-charge et de progresser dans certaines techniques et technologies, telles que celles des antennes à lobes formés étroits et celles des matériels de répéteurs en bande Ka (20/30 GHz).
À la suite d’une concertation entre Thomson-CSF, d’une part, et le CNES et la DAII (Direction des Affaires Industrielles et Internationales des PTT), ces deux administrations proposent, en juin 1982, à l’Agence spatiale européenne de présenter un satellite expérimental de télécommunications comme passager sur le vol de démonstration d’Ariane 4. Ce vol est prévu pour janvier 1986. Le satellite proposé, d’une masse comprise entre 1 250 et 1 450 kilos, doit utiliser une plate-forme construite par le groupement d’intérêt économique Satcom-International (MATRA et British Aerospace) et dérivée, avec quelques améliorations, de celle des satellites OTS, ECS et MARECS. La charge utile, qui doit être fournie par la Division Espace de Thomson-CSF, doit assurer deux missions: l’une opérationnelle en bande C (4/6 GHz), l’autre expérimentale en bande Ka (20/30 GHz).
La charge utile à 4/6 GHz doit assurer une forte densité du flux rayonné dans trois zones de service: la France métropolitaine, la Réunion et une partie de l’Afrique. Dans ce but, elle doit comporter huit répéteurs utilisant des TOP de 16 watts et des antennes à lobes étroits et conformés.
La charge utile à 20/30 GHz doit comporter deux canaux descendants et quatre canaux montants avec une matrice de commutation hyperfréquence à 4 GHz. L’incorporation de commutateurs en amont et en aval de la matrice doit permettre de faire fonctionner deux répéteurs à 20/30 GHz en mode transparent. Cet ensemble doit, en particulier, servir à des essais de propagation.
En 1983 et 1984, la Division Espace, qui devient entre-temps Alcatel Espace, reçoit une quinzaine de marchés d’étude pour les équipements de la charge utile 20/30 GHz et pour un module expérimental à 20, 40 et 90 GHz destiné à effectuer des essais de propagation.
Le montant total des douze marchés notifiés en 1983 est d’environ 70 MF. Ils sont suivis, à la fin de 1984, par trois autres pour un montant de 50 MF puis, au début de 1985, par un dernier marché de 22 MF.
En parallèle avec le lancement de ces études, la DGT a recherché une participation internationale pour aider au financement des développements de la plate-forme et de la charge utile. La lenteur de la mise en route du programme, à laquelle s’ajoute celle des négociations en vue de cette participation, conduisent à constater, vers la fin de 1984, que les délais de réalisation dépasseront la date du premier lancement d’Ariane 4.
De plus, le rattachement budgétaire du CNES au ministère des PTT entraîne des difficultés financières pour le programme. Cela amène la DGT à reconsidérer ses objectifs et, tout en maintenant un projet de mission expérimentale à 20/30 GHz, à décider que d’autres missions deviennent plus urgentes que le renforcement des liaisons à 6/4 GHz.
Pour toutes ces raisons, le programme Athos est définitivement arrêté au début de 1985. Néanmoins, les études en cours sur le 20/30 GHz seront menées jusqu’à leur terme, avec la réalisation de prototypes dits «aptes au vol» des matériels suivants:
– amplificateur paramétrique à 30 GHz;
– mélangeur de réception (30 GHz/4 GHz);
– amplificateur 4 GHz à large bande;
– matrice de commutation hyperfréquence à 4 GHz.
En revanche, les autres lots des marchés en cours seront résiliés.
Un calculateur de bord est étudié et réalisé avec Crouzet, et la Division Tubes Électroniques de Thomson-CSF étudie un TOP de 15 watts à 20 GHz.
Si cette réorientation permet l’entretien des compétences des équipes de Telecom 1, elle ne conduit pas, malheureusement, à la réalisation concrète, en temps opportun, d’une charge utile complète pouvant être exploitée en orbite.
En 1985, l’industrie française des télécommunications spatiales ne dispose pas encore d’un potentiel suffisant dans la bande 20/30 GHz. L’arrêt, au début de 1985, des activités industrielles sur le programme Athos contribue à dégrader dangereusement le plan de charge d’Alcatel Espace pour les années suivantes et sera l’une des causes du plan social qui sera mis en œuvre à partir de l’été 1985.
Les chefs de projet successifs à ATES sont Bruno Blachier, Jacques Beaucher et Pierre Jaubert.
Les satellites de télécommunications
Locstar – Geostar
Courant 1988, de grands espoirs sont fondés sur le développement du marché de la localisation de mobiles. Il existe certes déjà un marché opérationnel dans ce domaine, celui que s’est constitué Inmarsat avec le repérage maritime; mais rien de convaincant n’a été tenté quant au repérage terrestre, il est vrai plus complexe car il s’agit d’un repérage en trois dimensions. Pourtant, dans le domaine militaire, les Américains ont mis au point Transit depuis 1965, et ce système ira jusqu’à compter dix mille utilisateurs civils en 1980 avant de devoir être abandonné à cause de son manque de précision.
Les gros demandeurs de ce service sont les transporteurs routiers qui souhaitent disposer d’un moyen de communication, de repérage et d’aide à la navigation. Ils en attendent au moins deux points d’amélioration de leur rentabilité nette par rapport au chiffre d’affaires. S’y ajoutent les loueurs de voitures (vols, pannes…), les personnes en déplacement (agents, représentants…) et pourquoi pas le transport sur rail (la SNCF elle-même a engagé des études dans ce but), voire la navigation aérienne.
C’est ainsi que trois opérateurs vont se lancer sur ce marché dans le but d’être définitivement opérationnels vers 1990: Inmarsat (avec ses terminaux dits de norme C), Geostar Corp. (marché US), et Locstar (projet initié par le CNES pour le marché européen, l’Afrique et le Moyen-Orient). Alcatel Espace ne peut pas ne pas être présent sur ce nouveau marché, mais le coût des produits et la concurrence possible d’autres solutions lui inspirent une certaine prudence.
Le projet Geostar
Dès le début de l’année 1988, Geostar Corp. annonce qu’elle est prête à offrir les premiers services de RDSS (Radio Determination Satellite Service). Le premier transpondeur est mis en orbite en mars 1988 sur le satellite Spacenet IIIR. Fin octobre de la même année, la société compte déjà huit cents actionnaires. Deux satellites doivent être opérationnels en 1990 afin de permettre le positionnement d’un véhicule avec une précision de l’ordre de dix mètres.
En fait, l’aventure se terminera mal; un échec du satellite «hôte» de la charge utile Geostar entraînera un processus commercial et financier irréversible (les clients craignant une discontinuité de service) dans une période de fort investissement.
Alcatel Espace qui, par prudence, a limité son investissement initial dans la société à 1 million de dollars n’a plus qu’à passer cette participation par pertes et profits courant 1991
Le projet Locstar
Dès 1970 le CNES a acquis une solide expertise dans les systèmes de localisation et de collecte de données par satellite (Eole, Argos, Sarsat-Cospas). C’est sur cette base qu’il a envisagé la mise en place d’un système de repérage des mobiles et de messagerie par satellite en association avec Geostar, qui doit comprendre:
– un segment spatial de deux charges utiles, embarqué sur des satellites «hôtes»;
– un segment sol (stations terriennes, centre de traitement et de distribution des messages, réseau de balises fixes);
– un segment utilisateur (terminaux et bases de rattachement de ces terminaux).
Le service de radiorepérage doit permettre la radiolocalisation et la radionavigation à dix mètres près.
Une société anonyme dénommée Locstar sera créée en octobre 1988 avec un capital initial de 100 MF et de 400 MF dans une seconde phase (dont 100 MF d’apports en nature du CNES et de Geostar), dans lequel ATES entrera prudemment à concurrence de 5 MF.
En fait, les difficultés rencontrées par Geostar vont se répercuter très vite sur Locstar; la crainte des clients potentiels de procéder à des investissements significatifs sans garanties suffisantes de pérennité du système entraîne des difficultés insurmontables à assurer un «tour de table» d’investisseurs suffisant. Le Président d’Allest démissionnera en juillet 1990 et la société sera définitivement liquidée le 18 mars 1993.
Les satellites de télécommunications
Telecom 2
Dès la fin des réalisations des différents modèles de Telecom 1, et avant même qu’ils ne soient tous mis en orbite, la Direction Générale des Télécommunications (DGT), qui deviendra plus tard France Télécom, entame la définition de la génération suivante, Telecom 2.
Les missions de ces nouveaux satellites seront les mêmes que celles de Telecom 1, mais avec une capacité d’exploitation double. Chaque satellite possédera :
– 11 canaux dans la bande 14-12 GHz ;
– 10 canaux dans la bande 6-4 GHz ;
– 5 canaux dans la bande 8-7 GHz.
Alcatel Espace (ATES), en raison de l’expérience acquise dans Telecom 1, et en particulier des conditions satisfaisantes de fonctionnement des trois répéteurs intégrés dans un même satellite multimission, est tout naturellement désigné comme maître d’œuvre de la charge utile. Il est également désigné par la Délégation Générale à l’Armement (DGA) comme maître d’œuvre du système SYRACUSE II de télécommunications militaires protégées qui utilise la charge utile 8-7 GHz de Telecom 2.
Les premières études effectuées par Alcatel Espace dans le programme Telecom 2 commencent en 1986. Des marchés pour les études d’amplificateurs à l’état solide à 4 GHz et à 12 GHz ainsi que pour l’étude du répéteur à 8/7 GHz destiné à SYRACUSE II sont passés par la DAII.
En 1987 ATES reçoit un marché pour l’étude de filtres multiplexeurs à canaux adjacents et un autre pour un banc de mesure du phénomène «multipactor».
Au début de la même année deux marchés pour la phase B du programme sont attribués aux candidats à la maîtrise d’œuvre : MATRA et Aérospatiale. ATES, qui doit en tous cas fournir la charge utile, participe à cette phase B avec chacun des deux concurrents en s’efforçant de conserver une stricte neutralité.
La phase se termine en septembre 1987 par la remise au client des propositions, tant pour le satellite que pour sa charge utile.
C’est finalement MATRA qui est choisi par l’entité mandataire France Télécom-DGA pour réaliser les satellites Telecom 2, avec ATES comme cotraitant pour la charge utile. Les travaux de la phase C/D peuvent commencer au début de 1988.
La comaîtrise d’œuvre MATRA-ATES se traduit par la mise en place d’une équipe de projet commune parfaitement intégrée.
La charge utile sera installée dans une plate-forme du type «Eurostar». La durée de vie nominale de l’ensemble est de dix ans.
La zone de couverture des antennes est soit globale, soit à faisceaux formés, soit à faisceau orientable, selon le type de la mission.
Dans certains cas, la réutilisation de fréquences est assurée par la discrimination spatiale ou de polarisation. La possibilité de reconfiguration en orbite permet de choisir, parmi différentes couvertures, l’affectation de canaux dans la bande 6-4 GHz. Le répéteur 14-12 GHz émet également un signal permanent de balise à 12 GHz sur l’ensemble de la couverture pour faciliter le pointage des antennes terriennes.
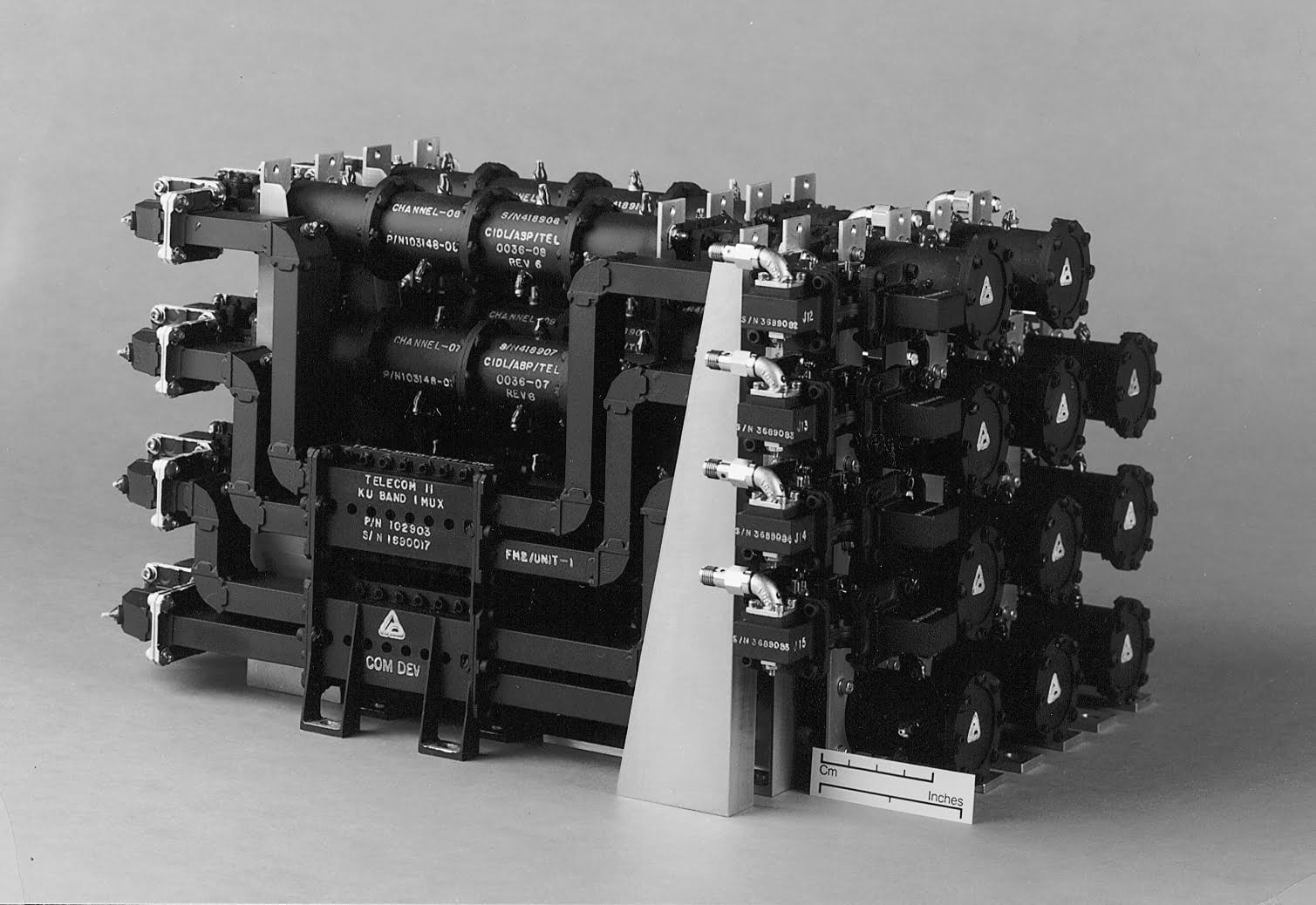
Multiplexeur d’entrée de Telecom 2 en bande Ku
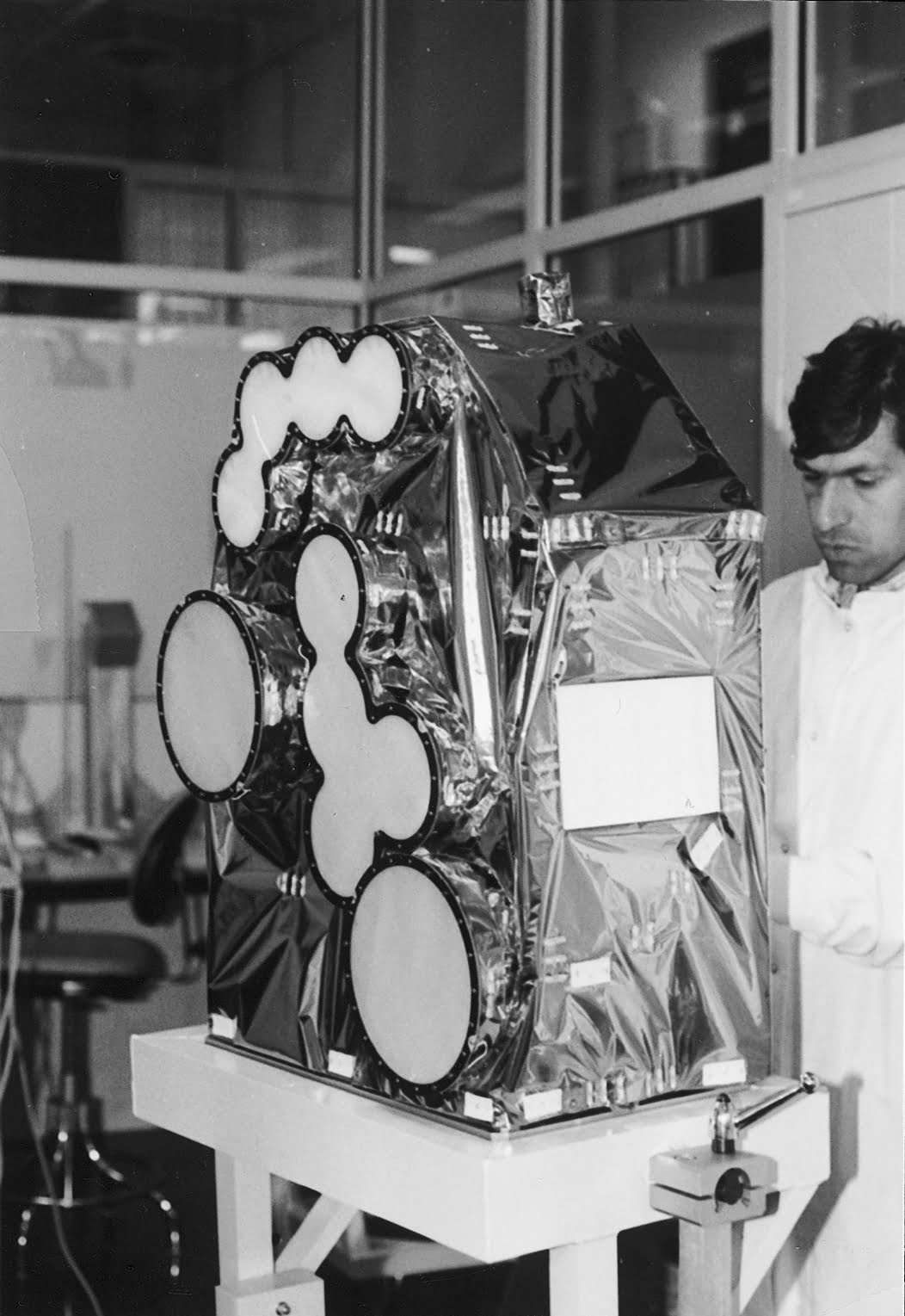
Sources d’alimentation d’antenne en bande C de Telecom 2
Les sous-systèmes antennes et répéteurs font appel à des techniques et à des technologies performantes développées dans les programmes de recherche et développement. En particulier :
– multiplexeurs de canaux adjacents à 12 GHz ;
– antenne à 14-12 GHz assurant la discrimination de polarisation au moyen de deux sources primaires et d’un réflecteur à double grille en Kevlar nid d’abeilles ;
– amplificateur de puissance à 4 GHz à l’état solide ;
– démultiplexeurs à résonateurs diélectriques à 4 GHz ;
– antenne d’émission à 4 GHz fonctionnant en simple ou double polarisation et comprenant une source à dix éléments et un grand réflecteur en coque mince de fibres de carbone ;
– oscillateur local ultrastable des récepteurs à 8 GHz ;
– antenne à 8-7 GHz à faisceaux formés et à gain élevé constituée d’un grand réflecteur déployable en coque mince de fibres de carbone et d’une source à quatre éléments.
Le sous-système de télémesure – télécommande – télémétrie – gestion de bord comprend les équipements spécifiques d’émission et de réception dans les bandes 2 GHz, 6-4 GHz et 8-7 GHz ainsi qu’une unité centrale d’interface.
Les sous-systèmes électroniques sont conçus pour fonctionner en redondance active.
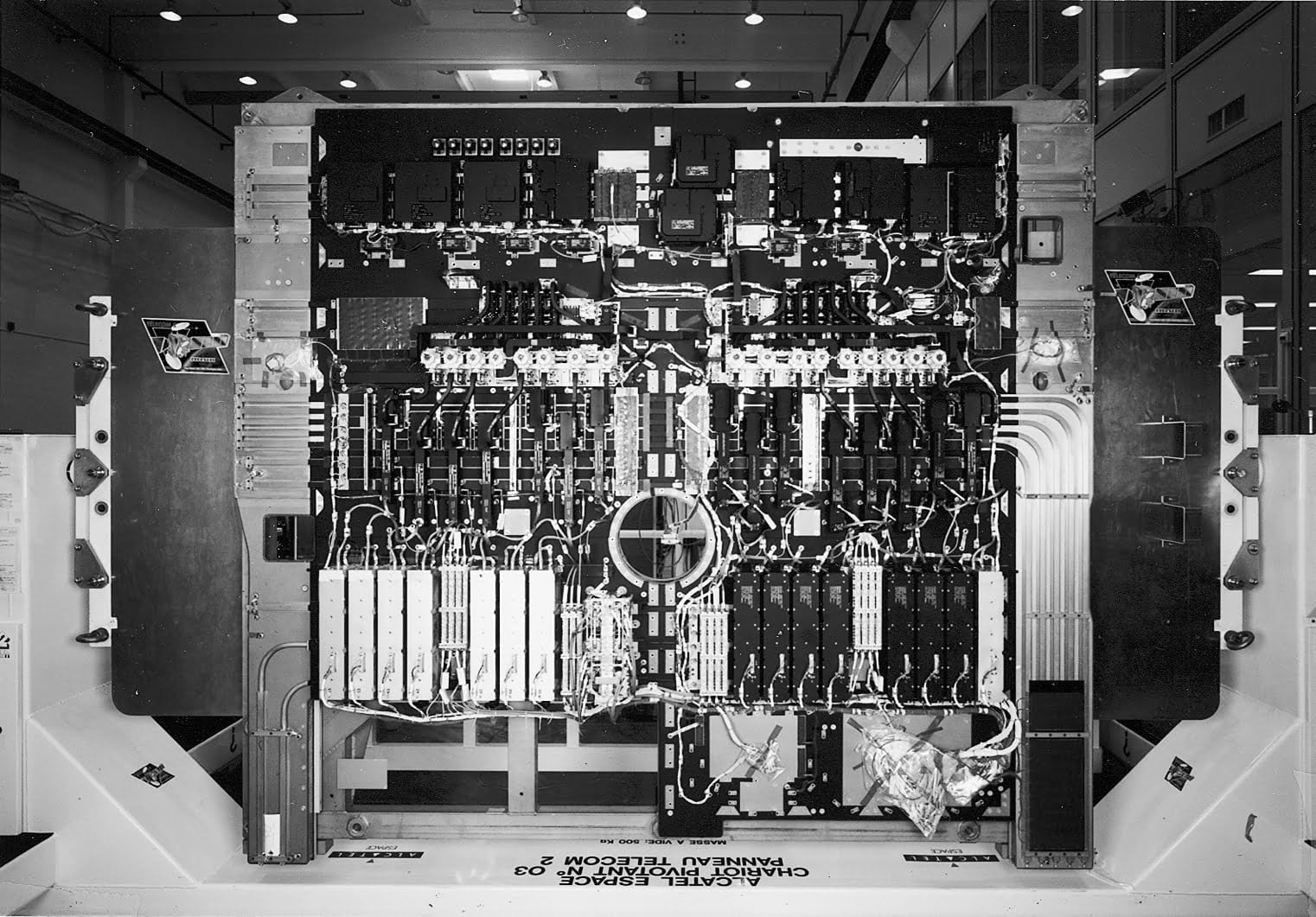
Panneau nord de la charge utile de Telecom 2
Dans le cadre de ses fonctions de maître d’œuvre de la charge utile, ATES réalise lui-même une partie importante des équipements qui la composent. Cependant, un certain nombre de matériels sont sous-traités à des industriels européens, canadiens, japonais et américains.
Trois satellites sont réalisés dans le cadre du marché principal. Un quatrième modèle de vol fera l’objet d’un marché complémentaire.
Telecom 2A est mis en orbite le 16 décembre 1991 à partir du CSG de Kourou par Ariane 44L (vol 48).
Telecom 2B est mis en orbite dans les mêmes conditions le 16 avril 1992 (vol 50) ainsi que Telecom 2C le 7 décembre 1995.
À la fin de 1995, tous trois assurent normalement leurs missions.
Cinq chefs de projet se sont succédé à ATES pour l’exécution du programme : Michel Bourdeil, Robert Lainé, Guy Schang, Pierre Jaubert et Pierre Boulo.
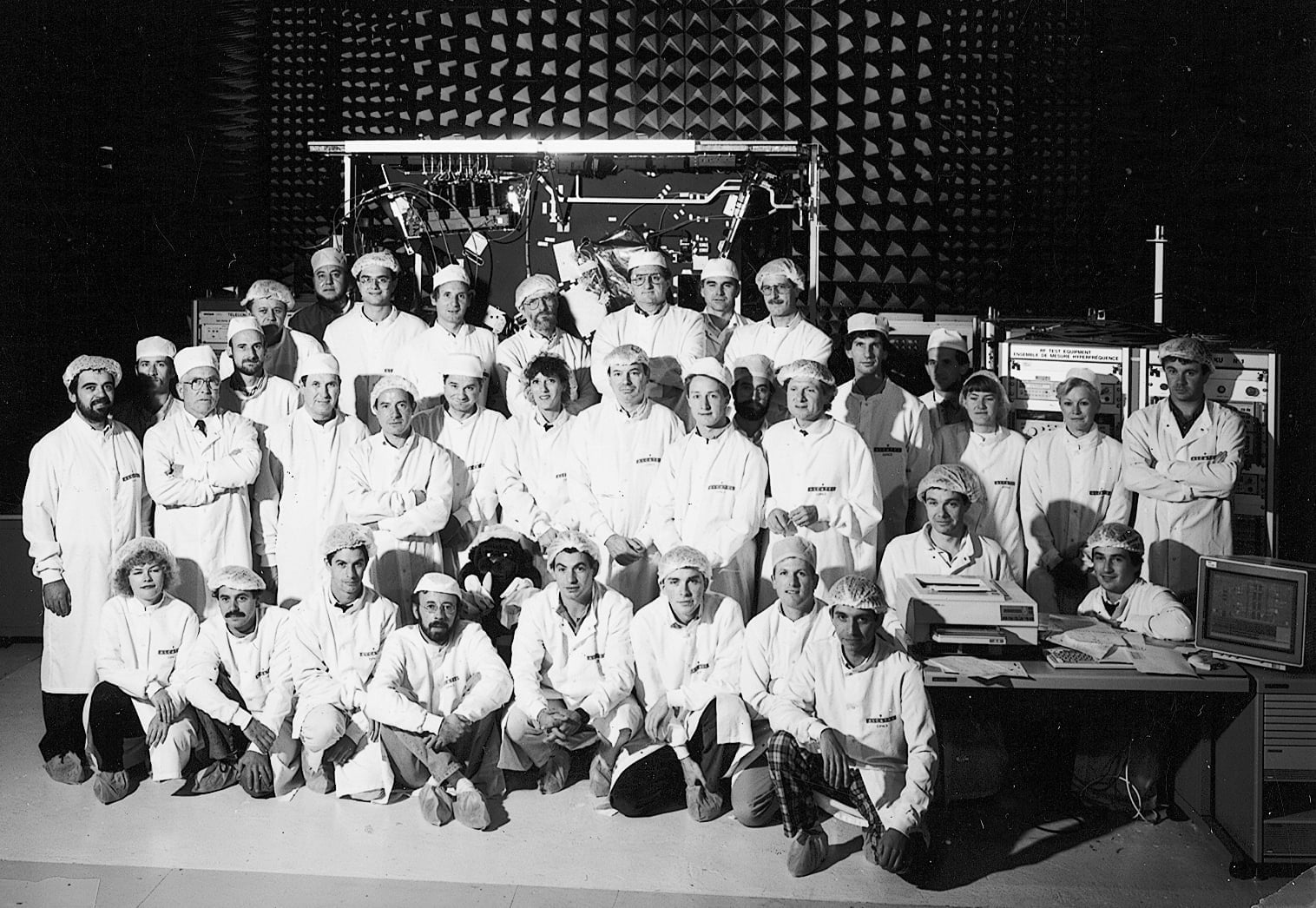
L’équipe d’intégration de Telecom 2
Les satellites de télécommunications
Artemis
Depuis la fin des années soixante-dix, l’ESA effectue des études préliminaires de définition d’un système de satellites géostationnaires utilisés comme relais pour communiquer entre des satellites en orbite basse et un petit nombre de stations sol de contrôle et de collecte de données. Ce système doit être analogue à celui que la NASA a commencé à construire en 1976 sous le nom de TDRSS(Tracking and Data Relay Satellite System). Il doit permettre de réduire à deux le nombre de stations sol nécessaires pour obtenir une couverture globale. ATES participe à quelques-unes des études.
Le 10 novembre 1992, le Conseil de l’ESA, réuni à Grenade, approuve le programme qui porte le nom de DRS (Data Relay System). Outre la collecte de données, DRS doit être utilisé comme relais de communication avec des mobiles terrestres. Le Conseil approuve également une mission préparatoire de démonstration baptisée Artemis.
La plate-forme d’Artemis doit emporter, en plus des répéteurs et des antennes de télécommunications, des démonstrateurs technologiques (deux propulseurs ioniques, un capteur de microvibrations et un capteur d’éléments polluants engendrés par la propulsion ionique).
Artemis est prévu pour une mise en orbite par un lanceur de la famille Ariane (Ariane 4 ou Ariane 5) en 1999. Sa durée de vie estimée est de dix ans.
La mission de télécommunications comprend essentiellement :
– une charge utile de relais (téléphonie et données) entre des mobiles terrestres circulant en Europe et en Afrique du Nord et des stations terriennes ;
– une charge utile de relais (collecte de données) entre des satellites à défilement en orbite basse et les stations sol de collecte de données ;
– une charge utile de relais optique, partie du programme SILEX, probatoire pour les liaisons entre des satellites d’observation (SPOT 4) et des satellites géostationnaires de collecte de données.
Les liaisons entre les mobiles et le satellite s’effectuent dans les deux sens en bande L. Elles continuent vers les stations terriennes en bande Ku.
La bande S et la bande Ka sont toutes deux utilisées pour les liaisons entre les satellites à défilement et Artemis qui, pour cette fonction, communique avec le sol en bande Ka.
En 1993, après la désignation par l’ESA de la société italienne Alenia Spazio comme maître d’œuvre du programme de réalisation du satellite, ATES est retenu pour la fourniture des équipements suivants :
• Pour les signaux reçus de la station sol :
– préamplificateurs à faible bruit en bande Ka ;
– convertisseurs de fréquence (30 GHz-5,5 GHz) dont le signal de sortie alimente la voie d’émission optique, les voies d’émission en bandes S et Ka et les équipements spécifiques de télémesure et de télécommande ;
– convertisseurs de fréquence (5,5 GHz-2 GHz) ;
– amplificateurs de puissance de 30 watts à l’état solide en bande S ;
– amplificateurs de canaux à 5,5 GHz ;
– convertisseurs de fréquence (5,5 GHz-23 GHz) ;
– amplificateurs de puissance à TOP de 30 watts à 23 GHz ;
– antenne d’émission.
• Pour les signaux reçus des satellites défilants :
– convertisseurs de fréquence (2 GHz-5,5 GHz).
Les modèles d’ingénierie de ces équipements sont livrés par ATES le 20 octobre 1995. La suite du programme Artemis sort des limites du présent ouvrage.
Les satellites de télécommunications
IOC
Le programme IOC (Interorbital Communications) est destiné à effectuer une expérimentation de télécommunications interorbitales préfigurant le futur système européen DRS (Data Relay System) de collecte et de transmission d’informations vers les véhicules spatiaux en orbite basse. Ce système sera appelé à remplacer le réseau de stations terriennes de télémesure et de télécommande. IOC en est la première expérience de validation.
Les équipements spécifiques de la mission doivent être intégrés dans le véhicule européen multimission récupérable Eureca qui sera mis en orbite par la navette Atlantis le 7 août 1992 et récupéré par la navette Endeavour le 24 juin 1993. Eureca peut embarquer une charge utile d’une tonne et dispose d’une puissance électrique disponible d’un kilowatt.
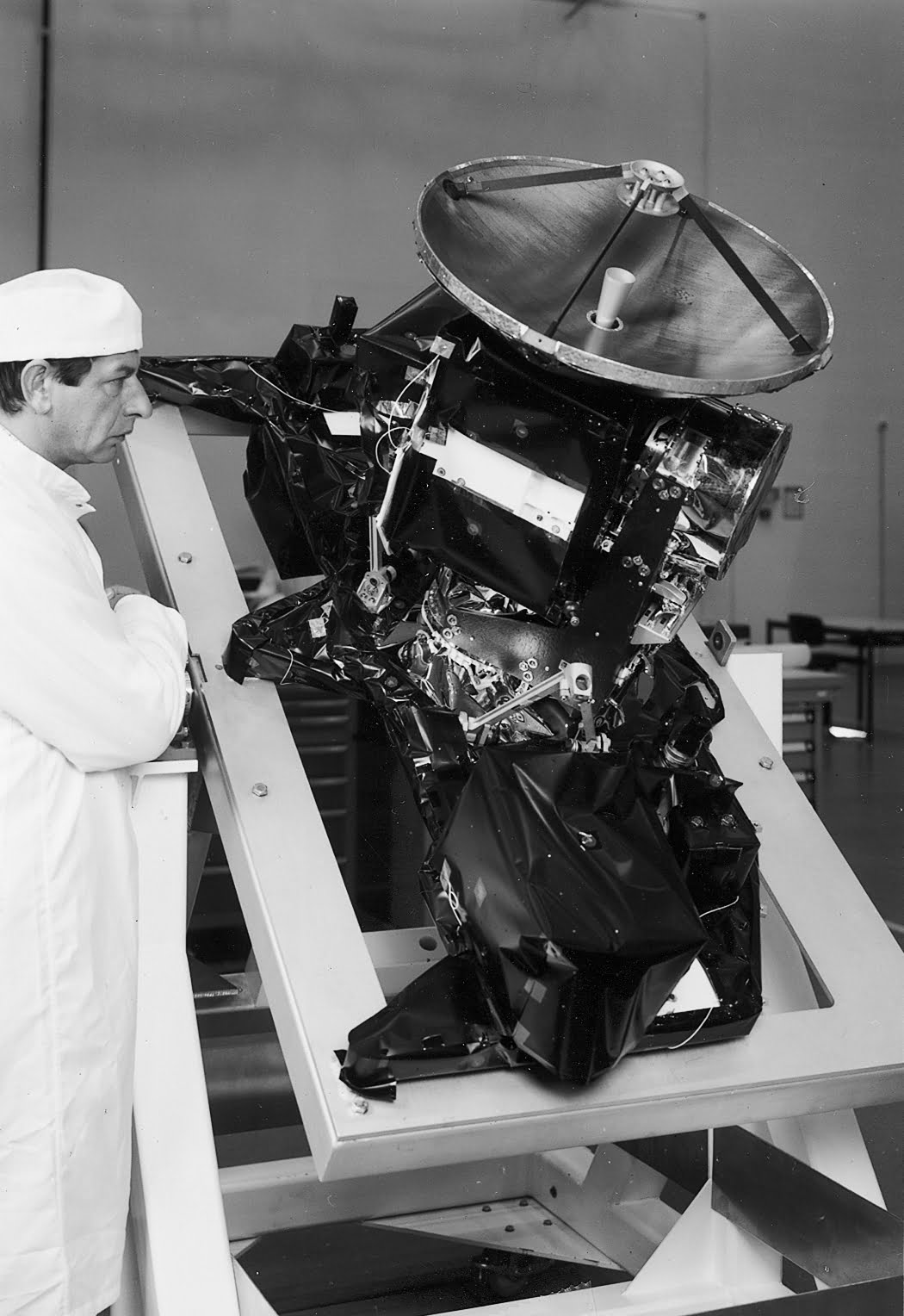
La charge utile d’IOC en intégration
La charge utile IOC assure les liaisons avec le satellite géostationnaire Olympus en bande Ka (20-30 GHz). Ce dernier communique avec les stations terriennes dans les bandes Ka et Ku (14-11 GHz). Les liaisons directes entre le véhicule Eureca et les stations terriennes sont assurées en bande S (2 GHz). La principale difficulté de l’expérience est le pointage à ± 0,1° près des antennes en bande Ka d’Olympuset d’Eureca (pointage sur désignation ou automatique).
IOC monté sur Eureca en préparation avant lancement par la navette américaine
La participation d’ATES au programme IOC comprend :
– la maîtrise d’œuvre de la phase d’études ;
– la conception de l’ingénierie électrique et du logiciel de la charge utile ;
– la fourniture du transpondeur en bande S ;
– l’assemblage, l’intégration et les essais de la charge utile.
Le chef de projet est Jacques Beaucher. Les études débutent en 1985 et les divers travaux se poursuivent sans incident notable. Le transpondeur est livré en 1987 et l’intégration, suivie de la livraison de la charge utile, se termine au milieu de l’année 1988.
Après sa mise en orbite, IOC remplit parfaitement sa mission.
Les satellites de télécommunications
Eutelsat II
Le programme Eutelsat II, qui démarre en 1985, constitue la deuxième génération de satellites de télécommunications de l’organisation européenne Eutelsat. Il fait suite au programme ECS. Eutelsat est désormais pleinement opérationnelle et c’est elle qui va passer les contrats de réalisation des satellites, alors que, pour la série des ECS, elle avait confié cette tâche à l’ESA.
Eutelsat II doit permettre d’assurer la continuité des fonctions de téléphonie, transmission de données, liaisons d’affaires, distribution de télévision en faisceau large et diffusion de télévision en faisceau étroit, en bande Ku. Il doit emporter seize répéteurs d’une puissance de sortie de 50 watts, utilisables simultanément, y compris en période d’éclipse. La réutilisation de fréquences est obtenue par l’emploi de polarisations linéaires orthogonales. La durée de vie estimée pour chaque satellite est de sept ans.
Après un appel d’offres et une période allouée à la préparation des propositions au cours du premier semestre de 1985, le client porte son choix, en février 1986, sur une équipe industrielle placée sous la maîtrise d’œuvre d’Aérospatiale pour l’attribution du contrat. Cette équipe, dont fait partie Alcatel Espace (ATES), comprend douze industriels appartenant à huit pays européens.

Panneau de la charge utile d’Eutelsat II
ATES participe au groupe de projet du maître d’œuvre, est responsable de l’ingénierie de la charge utile, développe et réalise le sous-système d’antennes, fournit des équipements pour les répéteurs à MSS (Marconi Space Systems, Grande-Bretagne) et pour le sous-système de télécommande-télémesure-localisation à MBB (Allemagne). Le marché correspondant est notifié en juin 1986.
Les modules de service et de charge utile sont développés séparément avant d’être intégrés dans une plate-forme stabilisée suivant trois axes de la famille Spacebus 100. Dans les sous-systèmes, la configuration des équipements autorise une grande souplesse d’exploitation par des commutations associées à un niveau élevé de redondance.
Les équipements réalisés par ATES pour être intégrés dans le sous-système répéteurs sont :
– les amplificateurs de canaux à gain élevé ajustable par télécommande qui sont construits en technologie hybride à puces nues avec des transistors à effet de champ ;
– les filtres en Invar mince pour les multiplexeurs de sortie.
Dans le sous-système télécommande-télémesure-localisation, ATES fournit :
– les transpondeurs en bande S qui assurent la mission durant les phases de transfert et de dérive du satellite ;
– les émetteurs de télémesure, les récepteurs de télécommande en bande Ku et les multiplexeurs associés qui assurent la mission lorsque le satellite est à poste.

L’antenne « est » d’Eutelsat II
Le sous-système antennes comprend deux antennes : l’une assurant une fonction d’émission, l’autre assurant des fonctions d’émission et de réception. Les réseaux de sources primaires de l’une et de l’autre sont reconfigurables par télécommande pour choisir soit l’émission à gain moyen (couverture de l’ensemble de l’Europe), soit l’émission à gain élevé (couverture spécifique d’une région).
Les composants des sources primaires sont spécialement étudiés pour se protéger contre les effets parasites de l’intermodulation passive. Les réflecteurs à double grille, conçus par ATES et réalisés par Aérospatiale, garantissent une grande discrimination de polarisation et sont protégés par des écrans dichroïques qui assurent une protection thermique efficace.
En août 1985, au cours de l’étude de la proposition d’ATES par les services techniques d’Eutelsat, soit six mois avant le choix des industriels fournisseurs, une question est posée sur les précautions prises à l’encontre du phénomène d’intermodulation passive (PIMP). Ce phénomène, identifié au cours des grands programmes des années soixante-dix, a pour conséquence la limitation des performances des systèmes de télécommunications à multiporteuses mettant en œuvre de fortes puissances à l’émission et une grande sensibilité à la réception. Il est le résultat de la déformation du spectre du signal émis dans des discontinuités physiques parasites constituant autant d’éléments d’impédance non linéaire : oxydation, impuretés, ruptures dans les circuits hyperfréquences ou d’antennes, microdécharges dans les structures métalliques. Il se traduit par la génération intempestive de composantes du spectre émis qui tombent dans la bande de fréquences de réception et échappent à l’analyse théorique des bandes utilisables. C’est, en fait, un autobrouillage de la charge utile du satellite. Les systèmes les plus vulnérables sont évidemment ceux qui utilisent une antenne commune à l’émission et à la réception puisqu’ils ne bénéficient pas du découplage existant en cas d’aériens différents. C’est le cas de la conception d’ATES pour Eutelsat II.
Au cours du développement des antennes, et après enquête auprès d’industriels nord-américains, des efforts importants sont mis en œuvre :
– analyse théorique pour chiffrer les niveaux des composantes PIMP risquant d’engendrer le phénomène ;
– très grande rigueur d’exécution et utilisation de technologies spécifiques pour les circuits hyperfréquences et les antennes ;
– réalisation et utilisation, à la demande d’Eutelsat, d’un banc de mesures capable de déceler le phénomène à des niveaux extrêmement faibles, en présence de puissances émises égales au moins au double de celles engendrées par la charge utile.
Les résultats de la recette sont satisfaisants au sol et en orbite : le fonctionnement de la charge utile en mode multiporteuse n’est pas affecté. Le vieillissement des équipements au cours de la vie en orbite ne dégrade pas les performances. On peut en conclure que la conjonction de l’analyse théorique, de la qualité de la réalisation industrielle et des essais au banc a été particulièrement efficace.
Six modèles de vol du satellite ayant été commandés, ATES termine ses livraisons en octobre 1993. Le premier chef de projet est Jean Guéranger jusqu’au milieu de 1990, Jean-Louis Lacaze lui succède jusqu’à la fin du programme.
Les dates de lancement des différents modèles sont les suivantes :
– F1 le 30 août 1990 par Ariane 4 (V 38) ;
– F2 le 15 janvier 1991 par Ariane 4 (V 41) ;
– F3 le 7 décembre 1991 par Atlas 2 (AC 102) ;
– F4 le 17 juillet 1992 par Ariane 4 (V 51) ;
– F5 le 24 janvier 1994, échec du vol 63 d’Ariane 4 (V 63) ;
– F6 le 28 septembre 1995 par Ariane 4 (V 71).
Aucun incident notable n’est signalé sur le fonctionnement des équipements fournis par ATES dans les satellites qui ont été effectivement mis en orbite.

L’équipe d’études d’Eutelsat II et ses équipements
Les satellites de télécommunications
Inmarsat 3
Inmarsat est une organisation internationale créée en 1976 par une convention regroupant cinquante-sept pays membres. Elle exploite un système de satellites de télécommunications avec des mobiles maritimes, terrestres et aériens qui est la référence mondiale dans ce domaine.
Au premier semestre 1990, Inmarsat émet un appel d’offres pour trois à neuf satellites au sol, avec option de livraison en orbite. Une telle affaire apporterait à ATES une charge de travail de l’ordre de mille hommes/an jusqu’en 1995, prenant ainsi le relais du programmeTelecom 2-SYRACUSE 2 qui doit se terminer fin 1991 pour l’essentiel. Par ailleurs, elle apporterait à ATES une première expérience de maître d’œuvre d’un consortium international (avec Ford, Mitsubishi, Aérospatiale…).
C’est dire si la réponse à cet appel d’offres est prise avec sérieux à tous les niveaux de la société. Aussi, sous le pilotage d’Alain Roger et de son équipe emmenée par Francis Fraikin et Jean-François Gambart, un véritable raz-de-marée déferle sur l’entreprise. Mais face à elle se trouvent des concurrents redoutables : GE Astro/Marconi, Hughes et BAE/MATRA.
Un premier rapport d’évaluation place ATES en tête au plan technique, GE Astro en numéro un au plan du management. Quant au prix (à fournir dans un second temps), c’est la grande inconnue. Plusieurs comparaisons ont été effectuées sur la base des derniers programmes internationaux dont le prix a paru dans la presse spécialisée ; ces premiers éléments montrent qu’ATES est «hors des clous». Mais les évaluations sont fragiles et changeantes.
C’est alors qu’intervient le Crédit Lyonnais qui propose à la Direction Financière, sous réserve – bien entendu – de l’accord préalable de l’administration fiscale, un montage savant de double crédit-bail fiscal (double dip) assorti d’une pirouette de l’argent sur les Docks de Dublin. Monique Blanc, aidée d’une équipe d’actuaires d’un grand cabinet d’audit, va se dépenser sans compter pour échafauder un tel montage. Durant le mois qui précède la remise de l’offre, elle, ses «mercenaires» et les experts du Crédit Lyonnais vont faire du «non-stop» dans une ambiance de kermesse. Grâce à ce mécanisme, l’offre d’ATES revient «dans les clous».
Au même moment, ATES et Aérospatiale reprennent les négociations concernant un rapprochement de leurs activités satellites.
Enfin, le verdict tombe. On ne peut mieux résumer la déception de tous que par cette comparaison faite, à l’époque, par un responsable commercial : «Le client voulait une Mercedes, on lui a fourni une Rolls Royce au prix d’une Mercedes, alors que GE Astro (sorti vainqueur) a offert une 2CV… au prix d’une 2CV.» Les couloirs bruissent du mot «non compliant», tout le monde veut en découdre, veut faire un procès pour «non compliance»… Et puis le temps passe. Quelques succès commerciaux obtenus en association avec Aérospatiale mettent du baume au cœur des équipes. Seuls les plus anciens se souviendront de cette merveilleuse épopée qui souda un peu plus l’entreprise.
«Compliant» ou pas, les Américains donnent à ATES une leçon de «real policy».
Début de cette page
Les satellites de télécommunications
Turksat
Türksat est le premier programme turc de télécommunications par satellite. Le client, l’administration turque des PTT, demande la livraison clés en main de deux satellites géostationnaires en orbite et de deux stations au sol de contrôle avec le personnel d’exploitation formé et opérationnel.
Alcatel Espace (ATES) et Aérospatiale, associés pour exercer une comaîtrise d’œuvre, obtiennent, en décembre 1990, une décision en leur faveur pour l’obtention du contrat qui leur sera notifié en avril 1991. C’est la première fois qu’ATES partage la responsabilité d’une telle entreprise qui inclut également l’achat du lanceur et de ses opérations de lancement.

Le satellite Turksat
Les satellites
Chacun des satellites est assemblé sur une plate-forme du type Spacebus de l’Aérospatiale, stabilisée suivant trois axes. La durée de vie estimée est de dix ans. La masse totale d’un satellite au lancement est de 1 780 kilos. La puissance disponible à bord en fin de vie est de 3 kilowatts.
En plus de la comaîtrise d’œuvre, ATES est responsable de la charge utile du satellite. Celle-ci comprend un module de télécommunications associé à un module de télécommande-télémesure-localisation fonctionnant en bande Ku.
Le module de télécommunications dispose de seize canaux en bande Ku connectés à une antenne unique d’émission-réception fonctionnant dans deux polarisations orthogonales au moyen d’un réflecteur bigrille.
Les opérations en orbite de transfert, de mise et de maintien à poste sont contrôlées en bande Ku et non plus en bande S comme cela était le cas dans les systèmes précédents.
ATES exécute l’intégration de la charge utile dans laquelle il fournit :
– six préamplificateurs à faible bruit ;
– cinq convertisseurs de fréquence ;
– vingt-quatre amplificateurs de canaux ;
– un multiplexeur de sortie ;
– trois récepteurs de télécommande ;
– quatre émetteurs de télémesure ;
– deux unités d’authentification ;
– une antenne.
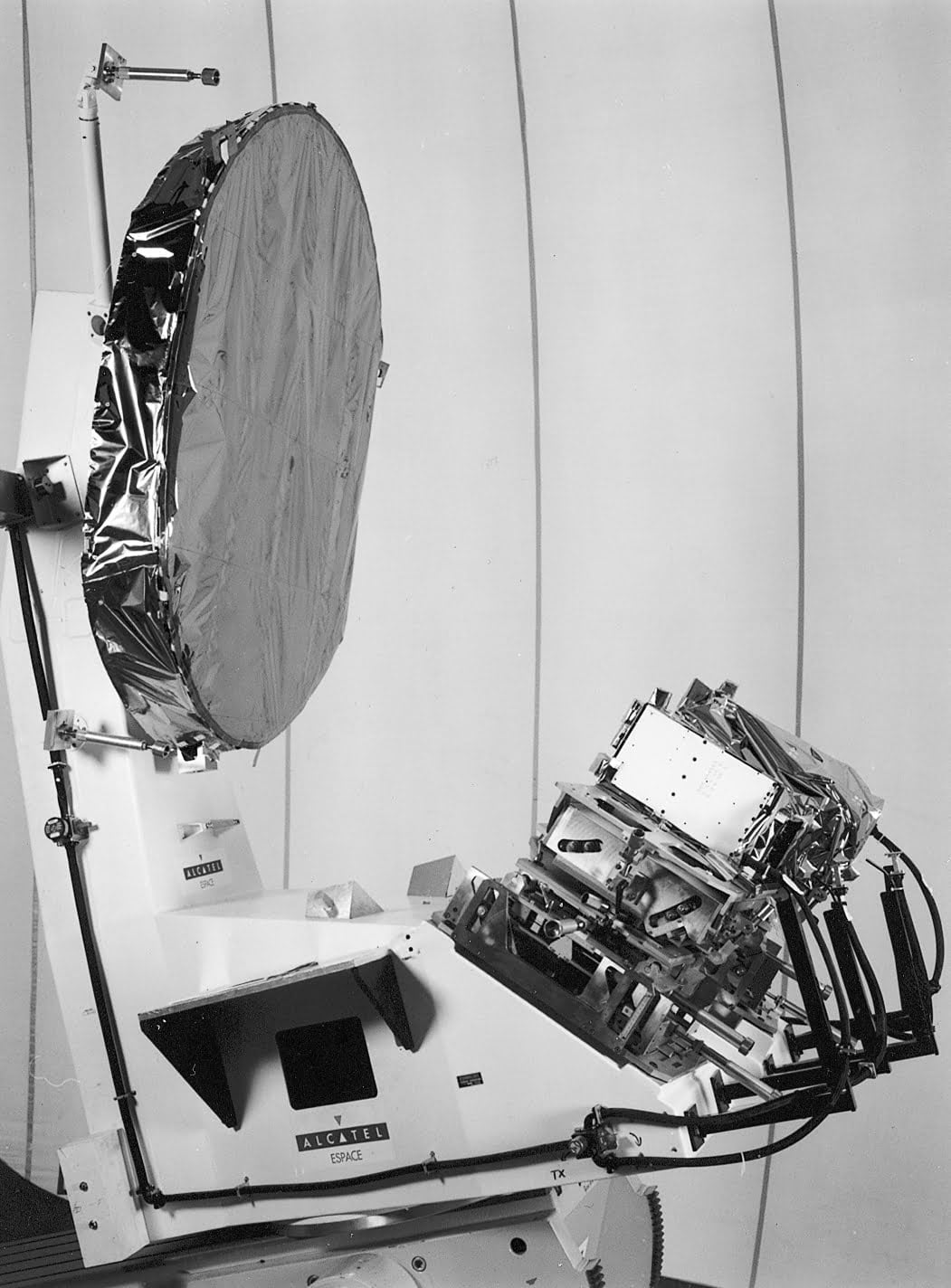
Antenne de Turksat
ATES sous-traite les autres équipements de la charge utile aux sociétés suivantes :
– un démultiplexeur d’entrée à Loral ;
– vingt-quatre ATOP à HEDD (Hughes) ;
– une unité de gestion de données à SAAB ;
– des filtres à Alcatel Espacio ;
– un réflecteur d’antenne à Aérospatiale ;
– quatre antennes omnidirectionnelles à Rymsa ;
– un cornet en bande Ku à Ericsson.
Les satellites Turksat remplissent des fonctions semblables à celles de Telecom 2 ou Eutelsat II dans les couvertures de l’Asie centrale, de l’Europe centrale et de la Turquie.
Le lancement de Turksat 1A, le 24 janvier 1994, à partir de Kourou par Ariane (vol V 63) est un échec.
Turksat 1B est mis en orbite le 10 août 1994 par Ariane (vol V 66).
Suite à l’échec du lancement de Turksat 1A, un troisième modèle de vol, tenu en réserve au sol, est mis en orbite par Ariane (vol V 89) le 9 juillet 1996.
Les chefs de projet successifs à ATES sont Denis Vaillant, de février 1991 à décembre 1993, suivi de Jean Ramis jusqu’à la fin du programme.
Les stations de contrôle
Étant responsable de la fourniture clés en main des deux stations au sol de contrôle des satellites (station principale de Golbaci et station de l’université d’Ankara), ATES assure la maîtrise d’œuvre du génie civil et de la réalisation des moyens, équipements et logiciels, ainsi que la formation du personnel.
Les divers moyens mis en œuvre sont :
– les sous-systèmes antennes et radiofréquences comprenant, entre autres, trois antennes, l’une de 11 mètres de diamètre à Golbaci et deux de 9 mètres de diamètre à Ankara et Golbaci, des amplificateurs de puissance à klystrons de 2,5 kilowatts et des ATOP de 600 watts ;
– un sous-système en bande de base remplissant les fonctions de télécommande-télémesure-localisation et distribution des signaux de temps-fréquence. La mise en œuvre de ces équipements est assurée par le sous-système de contrôle et de surveillance automatique. Elle peut être également manuelle ;
– les équipements et les logiciels de recette en orbite.
Les moyens implantés à Golbaci participent aux opérations de lancement et à celles de mise et de maintien à poste des deux satellites.
Les principaux sous-traitants d’ATES sont :
– Alcatel Telspace pour les antennes et la partie radiofréquences ;
– Alcatel Bell pour les matériels en bande de base ;
– Alcatel Telecom Norway pour l’authentification des télécommandes ;
– Cegelec pour l’installation des équipements et pour une participation à leur intégration ;
– Alcatel Data Networks pour le réseau de transmission de données.
Pour cette partie du programme Turksat, les chefs de projet à ATES sont successivement Noël Thébault de décembre 1990 à décembre 1991, puis Jean Ramis jusqu’à la fin en 1996.
Les satellites de télécommunications
Intelsat VII
Le programme
Au début de la décennie quatre-vingt-dix, la septième génération de satellites d’Intelsat devient la série la plus puissante de la flotte de cette organisation. Les satellites présentent en particulier la nouveauté de pouvoir reconfigurer en temps réel leur zone de couverture pour tenir compte du profil du trafic et de l’évolution des besoins du marché. Par rapport à ceux des générations précédentes ils permettent de fonctionner avec des stations terriennes de plus petites dimensions, de maintenir leurs performances en orbite inclinée et d’avoir un accès sécurisé en télécommande.
Deux versions successives seront réalisées : Intelsat VII et Intelsat VIIA, les différences portant sur une augmentation du nombre de canaux et des puissances d’émission en bande Ku.
En 1988, la société américaine Ford Aerospace, chef de file d’un groupe d’industriels international et qui deviendra plus tard Space Systems Loral (SS/L), est sélectionnée par Intelsat pour fournir un premier lot de cinq satellites (701 à 705) de la série Intelsat VII. En cours de contrat et à la suite d’un nouvel appel d’offres, deux exemplaires (706 et 707) du type Intelsat VIIA seront commandés en 1990, suivis d’un troisième (708) en 1992. Enfin, un sixième exemplaire (709) de la série Intelsat VII sera commandé en 1993.
Dans la version Intelsat VII, la charge utile comprend :
– 26 canaux en bande C équipés d’amplificateurs de sortie à l’état solide dont les puissances s’échelonnent entre 10 et 30 watts ;
– 10 canaux en bande Ku équipés de TOP dont les puissances vont de 35 à 50 watts.
Dans la version Intelsat VIIA, le nombre de canaux en bande Ku passe de 10 à 14 et leur puissance est plus élevée, allant de 49 à 73 watts.
Le groupe d’industriels constitué par SS/L s’appuie principalement sur un pôle européen mené par Alcatel Espace et un pôle japonais comprenant Mitsubishi Electric Company (MELCO) et Nippon Electric Company (NEC). Les contrats passés à ces industriels sont établis dans un esprit de fabrication et d’intégration «sur plans», ce qui signifie qu’en plus de l’ingénierie et des plans d’intégration d’ensemble le maître d’œuvre SS/L se charge de rédiger les spécifications détaillées de tous les matériels, ainsi que les plans d’intégration des différents sous-systèmes qu’il sous-traite.
Les enjeux
L’obtention du contrat représente pour Alcatel Espace, et pour les autres sociétés européennes, un enjeu industriel considérable.
Il faut, pour Alcatel Espace :
– montrer son outil industriel, que les Américains sont loin de soupçonner ;
– démontrer sa capacité à participer à la fabrication en série de satellites ;
– démontrer son aptitude à faire plus que de la simple fabrication ;
– se mesurer au marché international sur le plan de la tenue des coûts, des délais de livraison et de la qualité de la fabrication ;
– prouver qu’elle est un partenaire majeur.
En contrepartie il faut, pour le maître d’œuvre SS/L :
– apprendre à conduire, à grande distance, des sous-traitances de pans importants d’activité ;
– apprendre à déléguer une partie de son autorité sur ces activités ;
– apprendre qu’il lui est possible de sous-traiter les travaux de conception et d’ingénierie d’ensembles homogènes.

Le satellite Intelsat VII
Les travaux à ATES
Dans le cadre du contrat, quatre types de tâches sont confiés à ATES :
– tâches d’ingénierie système ;
– tâches de suivi d’équipements ;
– tâches de fabrication d’équipements ;
– tâches d’intégration et d’essais des répéteurs.
Les travaux d’ingénierie système consistent en une participation, dans les locaux du maître d’œuvre, à Palo Alto, et sous sa responsabilité directe, à des tâches d’ingénierie concernant les répéteurs de la charge utile. Ces tâches se traduisent donc par des détachements de personnel aux États-Unis, ce qui est en fait une location de «matière grise». Elles portent sur la conception des répéteurs, la préparation de l’intégration des satellites et son suivi pour les six premiers, ainsi que le suivi de l’assurance produit.
Les tâches de suivi d’équipements se traduisent par l’établissement des sous-contrats, le suivi du développement et de la réalisation des équipements des répéteurs chez les industriels européens et japonais, ainsi que des équipements fabriqués par ATES. Étalées sur quatre ans, elles portent sur plus de deux mille cinq cents équipements représentant une dizaine de familles. Elles sont remplies par un groupe de projet qui assume également la responsabilité de la gestion de l’ensemble du contrat d’ATES vis-à-vis du maître d’œuvre et du client final. Les chefs de projet successifs sont Gilles Lévêque, Jacky Teissèdre et Jean-Louis Lacaze.

Multiplexeur de sortie (OMUX) en bande Ku d’Intelsat VII
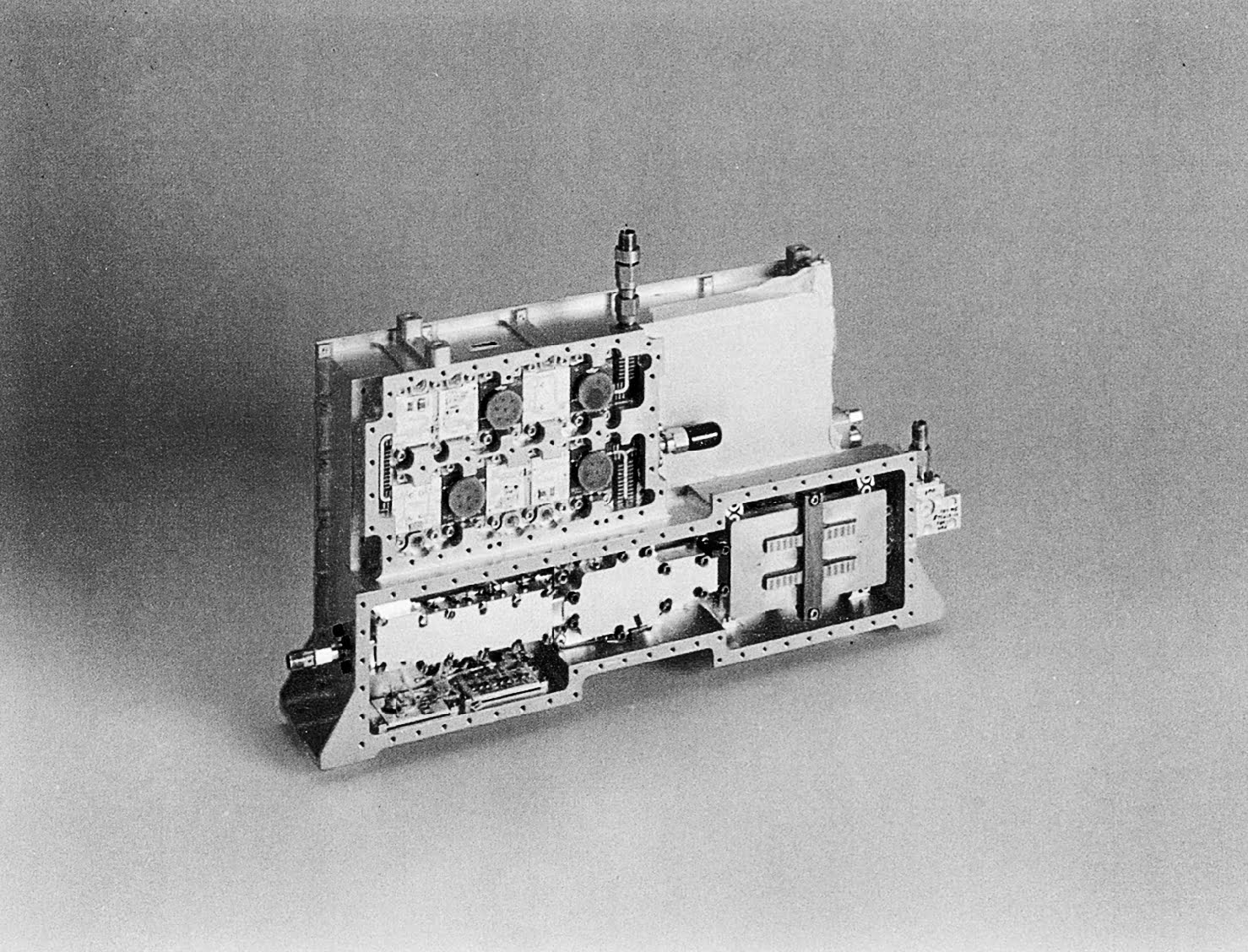
Mélangeur d’émission 4/12 GHz (up converter) d’Intelsat VII
Pour les équipements réalisés à ATES, essentiellement des récepteurs et des convertisseurs de fréquences, les tâches sont les études, le développement, la fabrication et les essais. À cette occasion, une plate-forme spécifique de fabrication et d’essais est mise en place afin d’effectuer les travaux en série. Une centaine d’unités sont livrées chaque année pendant quatre ans.
Les tâches d’intégration consistent dans l’assemblage, l’intégration et les mesures des performances des répéteurs de la charge utile. Cette activité inclut, en phase de préparation, l’étude et la réalisation des moyens électriques (bancs de tests) et mécaniques (chariots, conteneurs, etc.) nécessaires à son exécution. Les travaux «amont» d’aménagement des équipements sur la structure du satellite (dossier d’assemblage) sont exécutés par le bureau d’étude du maître d’œuvre.
L’ensemble des répéteurs est placé sur des panneaux radiatifs, c’est-à-dire sur les panneaux nord et sud de la structure du satellite. Chaque panneau a une surface d’environ huit mètres carrés, les équipements y étant installés sur plusieurs niveaux.
Un processus particulier d’intégration est développé à cette occasion. Par exemple, un atelier spécifique de fabrication des câbles coaxiaux est développé, permettant une production sur mesure de plus de cinq mille câbles en trois ans.
Les moyens en matériel et en personnel mis en place sont ajustés de manière à obtenir une cadence d’intégration d’un satellite par quadrimestre, soit un panneau tous les deux mois avec une durée moyenne de sept mois pour l’intégration et les essais d’un seul panneau. Le nombre d’équipements et de pièces manipulés dépasse dix mille pour les dix-huit panneaux.
Les lancements des différents satellites de la série Intelsat VII ont lieu aux dates suivantes :
| Satellite | Lanceur | Date | Résultat | Position |
| Intelsat 701 | Ariane 44LP | 20-10-1993 | Succès | 180° est |
| Intelsat 702 | Ariane 44LP | 17-06-1994 | Succès | 177° est |
| Intelsat 703 | Atlas IIAS | 06-10-1994 | Succès | 57° est |
| Intelsat 704 | Atlas IIAS | 10-01-1995 | Succès | 66° est |
| Intelsat 705 | Atlas IIAS | 22-03-1995 | Succès | 18° ouest |
| Intelsat 706 | Ariane 44LP | 17-05-1995 | Succès | 53° ouest |
| Intelsat 707 | Ariane 44LP | 14-03-1996 | Succès | 1° ouest |
| Intelsat 708 | Long March 3B | 14-02-1996 | Echec | NA |
| Intelsat 709 | Ariane 44LP | 15-06-1996 | Succès | 50° ouest |
Le programme Intelsat VII a permis à Alcatel Espace non seulement d’asseoir sa réputation internationale dans les domaines qui viennent d’être passés en revue, mais en plus d’élargir ses capacités de maîtrise d’œuvre.
6.3 – L’observation de la Terre
SPOT
Caractéristiques générales
L’avant-projet, établi par le CNES, d’un satellite d’observation de la Terre par radiométrie passive dans le spectre visible et infrarouge date de 1977.
Les perspectives de coopérer avec la NASA, promoteur du programme similaire Landsat, ou d’européaniser le projet alors que l’ESA étudie un projet de satellite d’observation par radar n’aboutissent à aucun résultat concret. SPOT est donc un programme national.
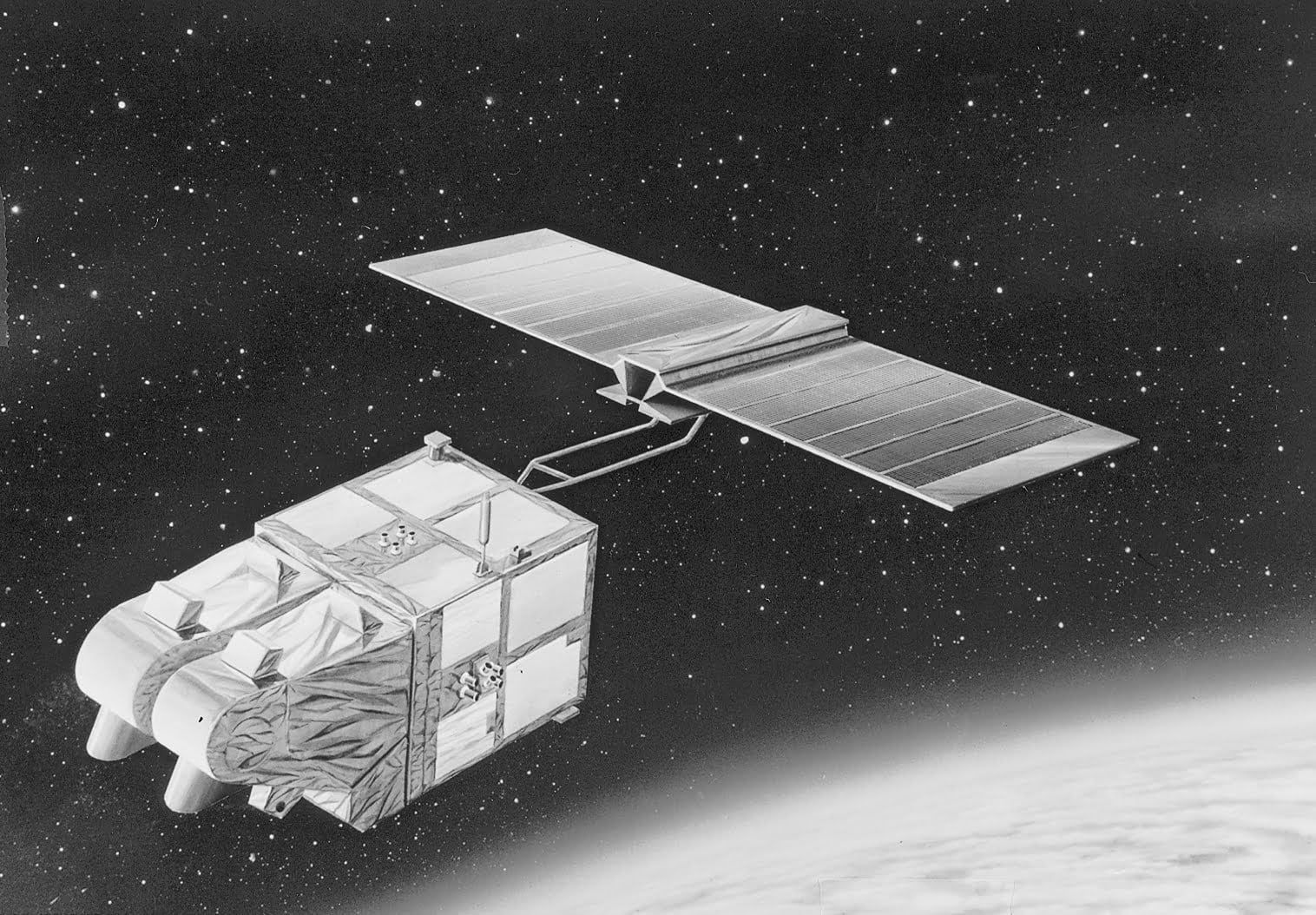
Spot
Dans sa première définition, mise en œuvre pour les trois premiers modèles SPOT 1, 2 et 3, la charge utile est faite de deux instruments optiques identiques à haute résolution fonctionnant dans le spectre visible et le proche infrarouge (HRV) et de matériels électroniques assurant la mise en forme des signaux, leur stockage et leur transmission vers le sol.
Deux modes de fonctionnement des instruments HRV sont prévus, un mode multispectral utilisant trois bandes, le vert (0,5-0,59 micromètre), le rouge (0,61-0,68) et le proche infrarouge (0,79-0,89), avec une résolution au sol de 20 mètres, et un mode panchromatique avec une bande s’étendant de 0,53 à 0,73 micromètre et une résolution au sol de 10 mètres.
L’organe sensible de chacun des télescopes est constitué d’un dispositif à transfert de charges (CCD), technique relativement nouvelle qui sera, plus tard, développée par Thomson-CSF.
À chaque orbite, les images représentent une bande de terrain d’une largeur de 60 km avec la possibilité, en décalant l’axe de visée, de réaliser des vues stéréoscopiques à partir des images prises au cours d’orbites successives. Le cycle de répétition des passages à la verticale d’un même point du globe est de 26 jours. L’orbite étant héliosynchrone, à une altitude de 832 km, l’heure locale de passage au nœud descendant est fixe à 10 h 30.
Deux enregistreurs magnétiques sont prévus pour stocker les images avant de les transmettre vers le sol pendant les passages du satellite en visibilité des stations terriennes de réception.
La participation de DSP dans SPOT 1, 2 et 3
Dès que l’avant-projet établi par le CNES est connu, la Direction du Département Espace-Satellites (DSP) de Thomson-CSF entreprend des démarches, en vue de définir quelle pourrait être sa participation dans le programme SPOT.
En janvier 1978, Jacques Chaumeron, Directeur de DSP, et Pierre Gautier, chef du Service Commercial, examinent avec le Directeur Général du CNES, Yves Sillard, les perspectives de participation au programme. Au niveau technique, le pilotage de l’affaire est confié au Service Systèmes SS2 dirigé par Jean-Claude Héraud, et Jean-Claude Anne est désigné responsable au sein de ce service.
Après un certain nombre d’études, la participation de DSP est définie comme devant porter sur :
– l’électronique de la charge utile ;
– le sous-système de télémesure et télécommande de servitude.
L’ électronique de la charge utile comprend deux sous-ensembles :
– l’électronique HRV qui effectue l’acquisition des signaux images fournis par les détecteurs à transfert de charges (CCD) des instruments, leur numérisation et leur mise au format, ainsi que les commandes de mise en œuvre des divers mécanismes des instruments. Cette électronique fait partie de l’ensemble HRV placé sous la maîtrise d’œuvre de MATRA. Sa masse est d’environ 30 kilos et sa consommation d’environ 95 watts ;

SPOT 1 – l’électronique HRV (Haute résolution dans le visible)
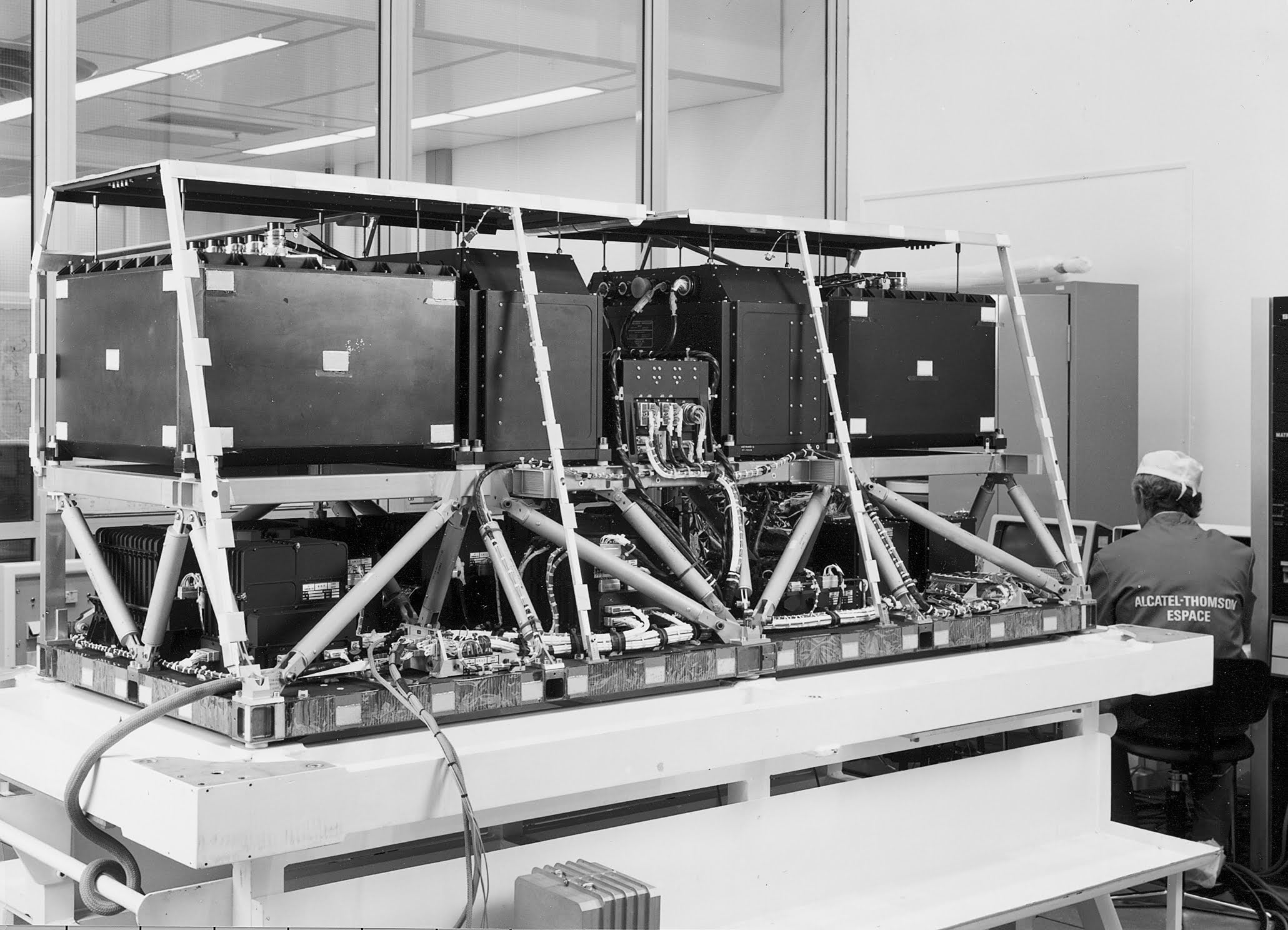
SPOT 1 – la TMCU (télémesure charge utile)
– la TMCU (télémesure charge utile), sous-ensemble dont DSP assure la complète maîtrise d’œuvre.
Cette dernière est constituée de trois parties principales :
– une électronique de servitude assurant l’interface entre le système de distribution des données et celui de conditionnement de l’énergie ;
– une électronique vidéo assurant la mise au format, la modulation, le séquencement et la commutation des signaux d’images en provenance des HRV vers les différentes fonctions ;
– une électronique hyperfréquences assurant la génération des fréquences porteuses et l’amplification de puissance.
La TMCU surmontée des 2 enregistreurs magnétiques
Les enregistreurs magnétiques, qui font partie de la TMCU, sont approvisionnés par le CNES auprès de la société américaine ODETICS.
L’ensemble de la TMCU, dont DSP assure l’intégration, représente une masse d’équipements de 240 kilos dont 40 pour la structure sous-traitée à l’Aérospatiale, 140 pour les deux enregistreurs et 60 pour l’électronique. La consommation est proche de 170 watts. L’émission des signaux est faite en modulation QPSK à 50 mégabits/seconde au moyen de TOP de 20 watts fournis par Thomson-CSF et fonctionnant dans la bande des 8 GHz. L’antenne est sous-traitée à Starec et le module de gestion à Crouzet.
Pour la première fois, DSP va diriger la réalisation d’une partie de satellite quasi indépendante et comprenant une structure, des convertisseurs d’alimentation et des matériels électroniques, y compris le contrôle thermique de l’ensemble. C’est un pas en avant dans l’acquisition des compétences qui pourraient, un jour, aboutir à la maîtrise d’œuvre de satellites complets.
Dans le sous-système télémesure-télécommande, où l’essentiel du traitement des signaux est effectué par l’ordinateur de bord fourni par la société suédoise SAAB, DSP fournit le transpondeur cohérent en bande S, nouvellement développé pour divers programmes.
Après une phase de propositions dans la première moitié de 1979, le travail des phases B pour les différentes participations commence à DSP au milieu de la même année.
Il faut ensuite préparer les propositions pour la phase C/D. La réalisation des matériels commence vers avril 1980, par anticipation, car les divers marchés sont en cours de négociation. Ce n’est qu’au début de 1981 que le marché le plus important, celui de la TMCU, est finalement notifié.
Les livraisons des matériels pour SPOT 1 se terminent en 1984. Le dernier matériel livré est le transpondeur en bande S qui a rencontré quelques difficultés de mise au point.
La plupart des matériels fournis par DSP dans l’électronique HRV et la TMCU ont été définis par le service «Systèmes» SS2 où le chef de projet, pour cette phase, est Jean-Claude Anne. Ils sont ensuite étudiés, mis au point et testés par le Service ES, sous la responsabilité de Michel Hayard, pour la partie traitement des signaux, et par le Service HY, dirigé par Marcel Palazo, puis par Pierre de Bayser et Pierre Fraise, pour la partie hyperfréquences.
Le Bureau d’Études et les services de fabrication ont commencé leur travail sur SPOT 1 à Meudon sous la direction de Jean Petrotchenko. Ils le poursuivent sous la direction de Roland Borchi pendant et après le transfert à Toulouse de la Division Espace, devenue ATES à partir de 1984. Guy Bertaud succède à Roland Borchi.
Après intégration de l’ensemble des équipements par le maître d’œuvre MATRA, SPOT 1 est mis en orbite le 22 février 1986 par Ariane 1 à partir de Kourou.
Les deux modèles suivants de SPOT, baptisés SPOT 2 et SPOT 3, sont, en ce qui concerne les fournitures d’ATES, pratiquement identiques à SPOT 1.
Les mêmes hommes sont responsables de leurs réalisations qui aboutissent au lancement de SPOT 2 le 22 janvier 1990 et de SPOT 3 le 26 septembre 1993.
Les chefs de projet successifs sont Guy Schang pour SPOT 1 et 2, puis Roger Saturnin pour SPOT 3.
SPOT 4
La mission de SPOT 4, programme financé par la France, la Belgique et la Suède, comporte quelques améliorations par rapport à celles des modèles précédents avec, entre autres, des prises de vue dans l’infrarouge (1,58-1,75 micromètre). Ce satellite doit emporter en plus divers «passagers» expérimentaux : Doris (localisation), Végétation (surveillance de la végétation et des océans), Pastel (transmissions laser interorbitales), Pastec (environnement orbital), ESBT (transpondeur à spectre étalé dont Alcatel Espace conduit l’étude et la réalisation).
Sa réalisation est menée en même temps, sous la maîtrise d’œuvre de MATRA, que celle du satellite d’observation militaire Helios 1 et donne lieu à des développements communs.
La plate-forme, les enregistreurs magnétiques spatialisés et la télémesure image sont les mêmes dans les deux satellites.
Alors que SPOT 1, 2 et 3 avaient utilisé des enregistreurs d’origine américaine, SPOT 4 et Helios 1 utilisent des enregistreurs développés en France par Enertec, filiale du groupe Schlumberger.
Les éléments de la télémesure image d’Helios sont les mêmes que ceux utilisés dans la TMCU de SPOT 4.
Les responsabilités d’Alcatel Espace dans SPOT 4 et Helios 1 sont voisines de celles que la société avait eues dans SPOT 1, 2 et 3 avec, cependant, une répartition différente des sous-traitances. En effet, la participation de l’Italie et de l’Espagne au financement d’Helios 1conduit à sous-traiter des équipements à des industriels de ces pays.
Un contrat de phase B est notifié à Alcatel Espace par MATRA, maître d’œuvre du satellite, en octobre 1988. Cette étude se termine à la fin du premier trimestre de 1989.
La phase C/D, démarrée dès le début de 1989 sur des couvertures financières du CNES, donne lieu à trois contrats notifiés par MATRA durant le dernier trimestre de 1990 :
– un contrat pour la «case» SPOT 4 (équivalente à la TMCU dans les satellites précédents) et la télémesure image (TMI) d’Helios 1 avec sous-traitance :
– du modulateur SQPSK à la société italienne Siemens Telecommunicazioni, remplaçant la société Selenia qui a été éliminée durant la phase B,
– de l’amplificateur à TOP à Thomson-CSF Tubes Électroniques qui en sous-traite l’alimentation à la société italienne FIAR,
– de l’antenne à Starec,
– du module de gestion à Sextant Avionique (ex-Crouzet) ;
– un contrat pour le compresseur formateur (COFO) d’Helios 1 avec sous-traitance à la société italienne Laben du convertisseur d’alimentation ;
– un contrat pour les transpondeurs en bande S pour les deux satellites avec sous-traitance de la fabrication de certains éléments et de l’intégration et des essais à la société espagnole Alcatel Espacio.
Le chef de projet est Benoît Durand.
Le déroulement du programme souffrira de certains retards dont les principaux, qui masqueront en fait les autres, seront causés par les difficultés dans le développement des enregistreurs magnétiques.
La structure compliquée de la répartition industrielle, due aux financements apportés par divers pays, contribuera également à l’allongement des délais.
Helios 1 est mis en orbite le 7 juillet 1995. SPOT 4, qui subit également des retards dans le développement de ses passagers Pastel et Végétation, n’a pas encore été lancé quand ces lignes sont écrites. Le programme SPOT 5 est alors en préparation, tout comme Helios 2 avec une phase A exécutée durant le premier semestre de 1994, et une phase B se déroulant d’octobre 1994 à juillet 1995.
La définition de chacun de ces deux satellites doit comporter d’importants perfectionnements par rapport aux modèles précédents : trois instruments d’observation sur SPOT 5 au lieu de deux, remplacement des enregistreurs magnétiques par des mémoires statiques proposées par Alcatel Espace et jugées plus fiables, trois canaux de transmission des données à 50 mégabits/seconde chacun.
Les restrictions budgétaires affectant SPOT 5 aussi bien que les avancées et reculades successives de la coopération franco-allemande sur Helios 2 laissent prévoir, à l’époque, une réduction des ambitions initiales ainsi que d’importants retards par rapport aux premières prévisions.
ERS
Les préliminaires
Les premières études de radars embarqués à bord de satellites entreprises par le Département Espace-Satellites (DSP puis ESA) de Thomson-CSF remontent à 1973.
Le Département fait, à cette époque, partie de la Division AVS (Avionique et Spatiale). Ce rattachement facilite grandement la coopération technique avec les spécialistes de cette Division qui mènent des études de SAR (Synthetic Aperture Radar : radar à ouverture synthétique) embarqués sur avions. C’est ainsi que de nombreux marchés d’étude peuvent être gagnés pour la plus grande partie à l’ESRO/ESA mais également au CNES et, plus tard, à la DTEN. Thomson-CSF devient rapidement le seul industriel européen connaissant bien le SAR.
Durant l’année 1973, de janvier à novembre, le contrat Sarsat, passé par l’ESRO, conclut à la faisabilité, en 1980-85, à bord d’un satellite en orbite basse (567 kilomètres), d’un radar latéral opérant à 10 GHz, balayant au sol une bande (fauchée) de 80 kilomètres de large avec une résolution de 50 x 50 mètres. Sa durée de vie prévue est de deux ans.
En janvier 1974, un contrat de l’ESRO, baptisé Sarlab, permet d’examiner la possibilité d’exploiter différentes charges utiles radar à bord de la navette spatiale à partir de 1980. Ces charges doivent avoir pour but d’effectuer des essais technologiques dans l’espace et également de tester les performances des matériels sur des «zones tests» au sol, afin de permettre aux scientifiques de préciser leurs exigences.
Les conclusions de cette étude sont présentées à un symposium organisé par l’université du Michigan aux États-Unis.
Les études sont pilotées par le Service Systèmes de DSP, dirigé par Claude Skenderoff, avec la participation de la Division AVS pour les radars et leurs antennes et de la société italienne Montedel, devenue plus tard Laben, pour le traitement de l’information. En plus de sa maîtrise d’œuvre système, DSP se charge de la partie transmission.
Après une période de calme, à partir de 1978, une série de marchés d’études sont à nouveau gagnés par DSP, le concurrent principal pour ceux de l’ESA étant la société britannique MSDS (Marconi Space and Defense Systems). La maîtrise d’œuvre est assurée par le Service SS2, dirigé par Jean-Claude Héraud, qui a été créé en juin 1977 à la suite de la scission en deux de l’ancien Service Systèmes. Bien que le Département DSP ait été, à partir de 1975, rattaché non plus à la Division AVS mais à la Division DFH, la collaboration avec la Division AVS se poursuit normalement.
Trois études sont menées en 1978 :
– Pour l’ESA
En collaboration avec AVS et CIMSA (filiale informatique de Thomson-CSF), une étude sur le traitement des signaux de Seasat-A, projet de satellite radar destiné à l’observation des océans.
– Pour le CNES
En collaboration avec AVS, étude de la compatibilité entre un SAR et la plate-forme de SPOT.
– Pour l’ESA
Ce qui est le début du programme ERS, une étude de phase A d’un satellite européen d’observation utilisant un SAR est notifiée le 18 avril 1978. Les coopérants de DSP y sont AVS, la société italienne Selenia et la société allemande Dornier, futur maître d’œuvre du programme ERS. Le chef de projet est Jean Rozes.
Une étude de phase A concurrente est menée par MSDS. Suite à cette phase A, DSP obtient de l’ESA, en 1979-80, des marchés d’étude complémentaires au niveau du système, ainsi qu’un marché pour une maquette simplifiée d’antenne pour la validation du programme de calcul.
Dans le même domaine, la Division ASM (Acoustique Sous-Marine) de Thomson-CSF obtient en 1980 un marché portant sur la préévaluation technologique de filtres dispersifs à onde de surface, et la Division Tubes Électroniques, associée à Selenia, obtient en 1979 un marché d’étude prospective sur les amplificateurs pulsés.
Enfin, la DTEN (Direction Technique des Engins) manifeste son intérêt dans le domaine en 1978 en confiant à DSP un marché d’étude de missions SAR à des fins militaires.
Le programme ERS 1
C’est en 1981 que le Conseil de l’ESA, tenant compte des études de phase A effectuées dans le cadre d’un programme préparatoire, décide de mettre en œuvre un programme optionnel de satellite d’observation de la Terre par des moyens radioélectriques, y compris le segment sol correspondant. Dans un programme dit «optionnel», les États membres sont libres de fixer le pourcentage selon lequel ils participent financièrement, et le programme ne peut démarrer que si le total des pourcentages atteint ou dépasse un seuil minimum habituellement au moins égal à 90 %, les quelques pour cent manquants faisant alors l’objet d’une négociation.
La France a décidé de participer au programme avec une part assez importante, de l’ordre de 20 à 25 %. Malheureusement pour Thomson-CSF, le CNES a proposé et obtenu, afin de réduire les coûts de développement de la plate-forme, d’utiliser pour ERS celle, déjà développée, de SPOT, sous la maîtrise d’œuvre de MATRA.
Compte tenu de cet engagement, le reste de la contribution française est très insuffisant pour qu’une société française, en l’occurrence Thomson-CSF, puisse prétendre à la maîtrise d’œuvre du SAR, qui doit être la partie principale de la charge utile.
La porte s’ouvre donc pour que le seul concurrent déclaré pour cette maîtrise d’œuvre, MSDS, l’obtienne sans compétition.
Tenant compte de ce fait, et quelque regrettable qu’il soit, la Direction de DSP cherche à se positionner pour obtenir au moins quelques fournitures d’équipements dans le SAR.
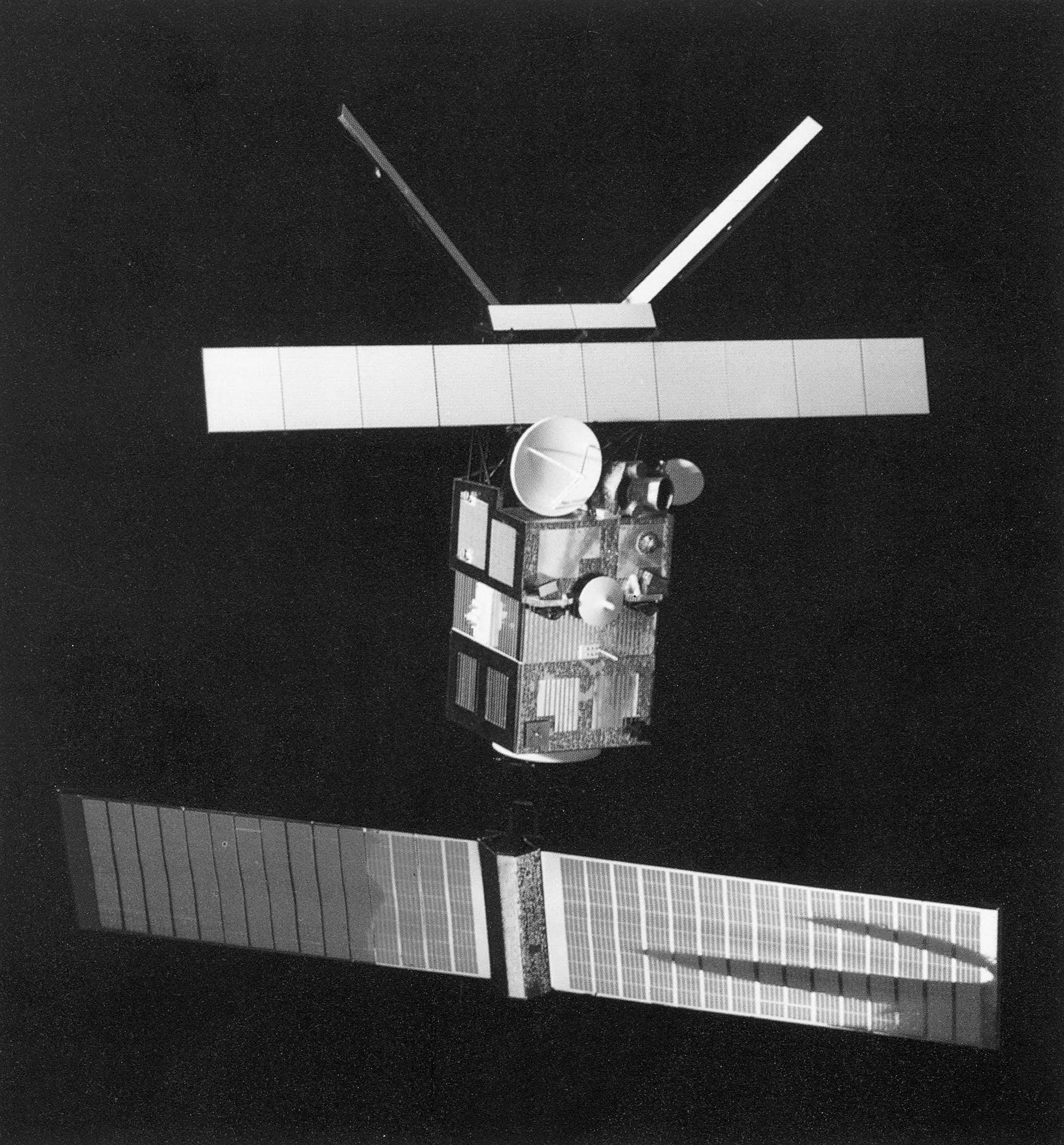
Le satellite ERS1
La charge utile
Au début de 1981, la charge utile d’ERS est définie pour assurer trois missions :
– AMI (Active Microwave Imagery) ;
– altimètre ;
– OCM (Ocean Color Monitoring).
L’AMI comprend deux instruments, le SAR et le «wind scatterometer» (diffusiomètre). Le SAR a pour missions : l’observation du champ de vagues des océans, l’analyse de la banquise et une mission expérimentale d’imagerie terrestre. Ce radar à visée latérale et à ouverture synthétique fonctionne en bande C (5,3 GHz).
Le «wind scatterometer» est un radar à ouverture réelle utilisable uniquement sur l’eau. Il doit effectuer des mesures sur l’interface air-mer, sa mission étant complémentaire de celle du SAR avec lequel certains équipements peuvent être mis en commun.
L’altimètre, radar fonctionnant en bande Ku (13,8 GHz), doit mesurer la hauteur des vagues. Au début de la phase B, sa présence à bord n’est pas garantie, il risque d’être éliminé pour des raisons budgétaires. Il est, malgré tout, maintenu dans la mission finale.
L’OCM doit utiliser un radiomètre passif multispectral, en particulier dans l’infrarouge, et ayant une faible résolution (de l’ordre de 800 mètres).
Un examen des compétences de DSP ainsi que de celles de la concurrence confirme que l’objectif doit être, avec l’aide des spécialistes de la Division AVS, d’obtenir la responsabilité d’un ou plusieurs sous-systèmes du SAR et la fourniture des équipements correspondants.
La phase B
À la fin de 1981, l’ESA se trouve en possession des résultats d’études de phase A pour l’ensemble du satellite et pour la charge utile et ses différents éléments.
Le coût du programme est évalué à 450 MUC, dont 280 pour le satellite. Le principal candidat pour la maîtrise d’œuvre du programme est Dornier.
Les avant-projets pour l’AMI, établis aussi bien par Thomson-CSF que par MSDS, ont montré que le SAR et le diffusiomètre peuvent comprendre un certain nombre d’éléments en commun et doivent donc être considérés comme faisant partie d’un ensemble unique exploité selon plusieurs modes.
La pression de l’Allemagne, dont la participation financière au programme est majeure, incite l’ESA à désigner Dornier comme maître d’œuvre sans mettre cette fonction en compétition.
Concernant l’AMI, le Département DSP de Thomson-CSF décide de s’allier à MSDS, qui est candidat à sa maîtrise d’œuvre.
Au cours d’une réunion tenue le 6 janvier 1982 entre sir Peter Anson, de MSDS, assisté de Ian Mac Millan, et Jacques Chaumeron, Directeur de DSP, assisté de Jean-Claude Héraud et Yves Farbos, il est conclu et enregistré que les deux sociétés ont décidé de s’allier pour la phase B de l’AMI et souhaitent, pour des raisons économiques évidentes, n’avoir à préparer de futures propositions qu’à destination d’un seul maître d’œuvre pour le satellite.
Suit alors un projet de partage des tâches et des fournitures, étant entendu que certains matériels peuvent être mis en compétition hors des deux sociétés, afin de satisfaire la loi du «juste retour» de l’ESA.
MSDS, maître d’œuvre de l’AMI, accepte de partager à 50 % avec Thomson-CSF les tâches d’ingénierie du système. Pour les équipements, dans les grandes lignes, Thomson-CSF doit prendre la responsabilité de la partie radio-fréquences alors que MSDS se charge des matériels de traitement des signaux ainsi que de l’alimentation électrique.
La phase B commence en août 1982. Le chef de projet à DSP est Jean-Claude Anne, succédant à Jean Rozes qui n’a pas souhaité suivre le Département à Toulouse.
Dornier est maître d’œuvre de l’ensemble du satellite et MSDS (Marconi) est maître d’œuvre de l’AMI.
Dans ce dernier, Thomson-CSF a la responsabilité de cinq sous-systèmes :
– radio-fréquences (RF) ;
– amplificateur de puissance (HPA) ;
– calibrage ;
– «wind scatterometer» ;
– antenne.

L’équipe ERS 1 en 1984-1985. De gauche à droite Dominique Marquet, Christian Bassoua, Robert Rouy, Claude Argagnon, Jean bouguet, Jean-Benoît Nocaudie, François Witrand, X., Jacques Oster, Patrick Martineau, Isabelle Polesel et Yvon Menard
À la Division DES, quelques difficultés apparaissent dans la mise en place d’une équipe de projet suffisante, la surcharge de travail des ingénieurs, chronique depuis 1980, n’étant pas encore résorbée, et la perspective de défections à l’occasion du transfert à Toulouse n’autorise aucun optimisme dans ce domaine.
À partir de la première revue du programme, la revue préliminaire tenue en décembre 1982, il est demandé à chacun des coopérants de fournir des estimations budgétaires des phases C/D pour les éléments dont il est responsable.
Bien qu’il soit assez habituel, dans ce genre de programme, que l’examen des premières estimations donne lieu à des passes d’armes entre le maître d’œuvre et ses sous-traitants, il faut bien constater que ces dernières atteignent des sommets dans le cas du programmeERS.
Incluant celle fournie par Thomson-CSF pour sa propre part, la première estimation fournie par MSDS pour l’AMI atteint près du double de l’objectif de 70 MUC, l’objectif de prix pour le satellite complet étant de 230 MUC.
Thomson-CSF devient rapidement le bouc émissaire et se voit accusé d’être le principal responsable de ces dépassements.
Sous-système radio-fréquence (RF Sub-System) d’ERS
C’est là le danger habituel d’avoir à établir des estimations de prix alors que l’avancement technique des études de phase B ne fournit pas encore une définition suffisante des matériels. Ce danger, que Thomson-CSF a, à la suite d’expériences passées, probablement mieux perçu que MSDS, résulte du fait d’avoir à «naviguer», à ce stade du programme, entre deux positions extrêmes.
L’une consiste à présenter des estimations «tirées vers le bas» afin d’éviter un arrêt du programme par l’ESA, en raison d’un manque de ressources, mais avec le risque évident de se voir opposer ces estimations par le client lors de la négociation des prix de la phase C/D.
L’autre, choisie par Thomson-CSF, consiste, à partir de bases les plus réalistes possibles, à prendre une certaine marge de sécurité pour s’assurer contre le phénomène bien connu qui voit les prix augmenter progressivement lorsque les études révèlent des difficultés techniques non prévues au départ. Au cas très improbable où une partie de ces marges subsisterait après la fin de la phase B, elle serait fatalement éliminée au cours de la négociation de la phase C/D.
Le maître d’œuvre Dornier, qui se voit répéter par l’ESA que, s’il devait coûter trop cher, «son» programme risquerait d’être abandonné, fait bien entendu pression sur son sous-traitant MSDS pour «tirer vers le bas» les estimations.
Tout en défendant ses propres estimations, MSDS répercute cette pression sur son sous-traitant Thomson-CSF, et même sur Dornier, qui est son sous-traitant pour l’antenne du SAR.
De revue de programme en revue de programme, de «management meetings» en «management meetings», les discussions orageuses se poursuivent entre les trois partenaires, accompagnées d’échanges de lettres et de Télex aigres-doux.
Lorsqu’on commence à discuter des plannings de la future phase C/D, Thomson-CSF se retrouve dans la même position, accusée de saboter le programme en affichant des délais trop longs. Visiblement, ni Dornier ni MSDS ne sont en mesure d’apprécier, à ce stade, que la partie des matériels dont Thomson-CSF doit assumer la responsabilité est celle qui présente le plus d’innovations et de difficultés techniques et technologiques.
Sur le plan technique, après un début difficile, l’équipe qui a été constituée sous la direction de Jean-Claude Anne réussit, à partir de la revue intermédiaire des 25 et 26 février 1983, à assurer de bonnes prestations, malgré quelques problèmes de compréhension avec l’équipe de MSDS qui finissent par être résolus grâce à un travail en «colocation» à Portsmouth.
Jean-Benoît Nocaudie, devenu le commerçant de l’affaire, succédant à Yvan Farbos qui n’a pas souhaité suivre le Département DSP à Toulouse, mène, en équipe soudée avec Jean-Claude Anne, la bataille des négociations de prix. Son chef de service, Alain Roger, avec son dynamisme bien connu, lui apporte son soutien dans les «coups durs».
Une proposition perdue… et regagnée
À partir de mars 1983, MSDS fait savoir que, suite à des consignes de l’ESA, il va consulter d’autres industriels que Thomson-CSF pour les équipements du sous-système RF.
Thomson-CSF demande à être informée de ces consultations en faisant remarquer qu’elles sont contraires à l’accord du 6 janvier 1982.
En avril, MSDS communique la liste des sociétés qu’il prévoit de consulter pour tous les matériels initialement affectés à Thomson-CSF :
– sous-système RF : Thomson/SPAR ;
– sous-système calibrage : Thomson/SPAR/LM Ericsson ;
– amplificateur de puissance (NPA) : Thomson/Dornier ;
– antenne du scatterometer : Thomson/LM Ericsson.
Depuis février 1983, Thomson-CSF a renforcé, pour le programme ERS, ses relations avec le CNES. Des réunions d’information ont lieu à Paris et à Toulouse. Le CNES, tenu au courant du déroulement et des difficultés de l’affaire, accepte de soutenir financièrement Thomson-CSF sur les technologies qui l’intéressent.
Les pourparlers se poursuivent jusqu’en juillet 1983 et il est finalement décidé que le CNES passera un certain nombre de marchés d’étude sur divers points critiques des sous-systèmes RF et calibration, pour un montant global d’environ 5 MUC, et s’étalant jusqu’à fin 1985. Ce montant doit venir en déduction du prix de la proposition pour la phase C/D qui sera remise à l’ESA via MSDS.
Pendant ce temps, la phase B se poursuit et s’achève par une revue finale les 8 et 9 mai 1983 à Toulouse.
Les équipes technique et commerciale de DES entament alors le travail de préparation des propositions pour la phase C/D, qui sont remises à MSDS le 15 juillet. Le seul concurrent qui apparaît alors est SPAR.
L’essentiel des exposés techniques qui doivent faire partie de ces propositions est contenu dans le rapport de fin de phase B, et il a donc été convenu avec MSDS que seules seraient remises une mise à jour de ce rapport ainsi qu’une matrice de conformité. C’est une erreur funeste, car les propositions sont examinées à l’ESA par un comité extérieur à l’équipe de projet, qui n’est apparemment pas en possession du rapport de fin de phase B.
La proposition de Thomson-CSF est donc jugée par ce comité comme beaucoup moins complète que celle de SPAR qui, n’ayant pas participé à la phase B, a fourni un document beaucoup plus détaillé.
Par ailleurs, les prix de Thomson-CSF et de SPAR dépassent l’objectif fixé par MSDS, mais Thomson-CSF est nettement plus chère que SPAR qui, encore en raison de sa non-participation à la phase B, n’a peut-être pas anticipé toutes les difficultés du programme.
Pour toutes ces raisons, Thomson-CSF se trouve éliminée du programme ERS. L’énorme malentendu dont elle a été victime lors de la préparation de la proposition ne peut que susciter de sa part de violentes protestations auxquelles le CNES accepte de souscrire.
Après un certain nombre de discussions, une réunion à haut niveau est organisée à l’ESA, le 12 septembre, entre des représentants de l’ESA, du CNES, de Dornier, de MSDS et de Thomson-CSF.
Vingt-deux personnes se trouvent autour de la table, parmi lesquelles Jean-Marie Luton, Directeur Général adjoint du CNES, le Dr Pfeiffer, chef du projet ERS à l’ESA, le Dr Ulke, membre du directoire de Dornier Systems, et Jacques Imbert, alors Directeur de la branche Télécommunications de Thomson-CSF. Seul MSDS n’a pas envoyé de directeur. Sa délégation est composée du chef de projet ERS, Ian Mac Millan, et du commerçant de l’affaire, M. Ellingham.
Dans la délégation de Thomson-CSF, Jacques Imbert est assisté de Gérard Coffinet, Jacques Chaumeron, Alain Roger, Jean-Claude Héraud et Jean-Claude Anne, tous de la Division DES, ainsi que d’un juriste du siège social, car on ne prend jamais assez de précautions dans une telle affaire.
Après que chacune des parties a exposé son point de vue et que les discussions se sont poursuivies pendant près de deux heures, il apparaît clairement que la France ne participera probablement pas au financement d’ERS si Thomson-CSF n’est pas retenue pour la fourniture d’une part «substantielle» de l’AMI. C’est un risque mortel pour le programme.
Devant cette constatation, le débat est rapidement clos et il est demandé à Thomson-CSF de fournir, dans un délai de cinq semaines, une proposition, cette fois-ci complète et conforme aux critères de l’ESA. Un échange de lettres entre les différents dirigeants confirme ensuite cet accord.
La fin de l’été, qui coïncide avec le transfert de l’ensemble de la Division DES de Thomson-CSF à Toulouse, est donc consacrée à la réécriture de cette proposition.
Jean-Claude Anne conduit cette opération avec trois sous-systèmes de l’AMI en vue : le «RF subsystem» – le coeur du radar, générant les impulsions et les recevant – (responsable technique Benoît Durand, avec le soutien de Jacques Richard, pour les problèmes de traitement du signal) ; le «calibration subsystem», dont la fonction est de permettre l’exploitation des images radar grâce à des références stables (responsable Yvon Menard) ; enfin, le «HPA, High Power Amplifier», tube bande C capable de délivrer des impulsions de 5 kW crête, et son ensemble d’alimentation (responsable technique Alain Corain).
Cet été d’efforts laissera quelques souvenirs tenaces au sein de l’équipe, parmi lesquels les visites de Philippe Blanchet, venu soutenir le moral des troupes qui n’ont ni horaires ni week-ends, comme il se doit !
L’effort n’aura pas été vain car Thomson-CSF/DES se voit attribuer deux des trois sous-systèmes : le «RF» et la «calibration», Dornier se réservant le «HPA».
Cette satisfaction est très théorique et à court terme, car ERS ne démarre pas, faute de financement. Après une extension de la phase B, pour quelques semaines, l’ESA se voit obligée de renoncer au financement de certaines équipes, dont celle de Thomson-CSF.
La version finale de la proposition de DSP a été livrée le 17 octobre 1983. Elle est particulièrement volumineuse si l’on en croit les chiffres révélés à l’époque par le chef de projet :
– poids d’un exemplaire : 53 kilos ;
– hauteur de la pile : 1,5 mètre ;
– nombre total de classeurs utilisés : 325 gros, 50 moyens, 125 petits.
Le nombre d’exemplaires et les destinations sont :
– ESA : 10 exemplaires / 530 kilos
– MSDS : 6 exemplaires / 318 kilos
– Dornier : 1 exemplaire / 53 kilos
– CNES Toulouse : 2 exemplaires / 106 kilos
– CNES Paris : 1 exemplaire / 53 kilos
– DES-DSP : 5 exemplaires / 265 kilos
Les actions remontent
L’une des raisons du non-démarrage du programme est son coût, de l’ordre du milliard d’unités de compte, qui fait peur à certaines délégations. D’autres sont insatisfaites du retour industriel qui s’annonce et ne donnent pas leur accord a priori. Patiemment, les promoteurs du programme à l’ESA résolvent les problèmes et, fin 1983, début 1984, le financement de l’Agence réapparaît pour une préphase C de six mois. Celle-ci est encourageante pour la suite de l’affaire car son coût est déductible de celui de la phase C/D, à la demande, très formelle, de l’ESA.
L’équipe de DES se reconstitue peu à peu autour du nouveau chef de projet, Claude Argagnon, qui voit son futur projet passer par tous les stades, y compris celui de la mort clinique : «Le projet ERS n’existe pas, M. Chaussedoux l’a dit !», s’est-il, en particulier, fait dire à l’entrée du bureau d’études.
C’est finalement un Conseil de l’ESA, tenu les 28 et 29 novembre 1984, qui décide la poursuite du programme et la mise en œuvre de la phase C/D. Le «kick off» est donné par Dornier le 4 décembre 1984 et la réunion de «kick off» entre MSDS et ATES a lieu en janvier 1985.
La préphase C/D a pour but de régler quelques problèmes système (à quoi sert donc le calibrage ?) : s’attaquer aux points durs de la conception, mobiliser les fournisseurs pour un éventuel démarrage, etc.
Parmi les craintes initiales des ingénieurs figure en particulier l’effet «Multipactor», phénomène d’arrachement d’électrons qui peut devenir résonant sous certaines conditions, interrompre le signal et éventuellement dégrader l’état de surface des guides ou dispositifs hyperfréquence. L’impulsion de 5 kW crête cause bien des soucis, et la réalisation d’un banc de test susceptible de délivrer réellement la puissance est à l’ordre du jour.
Alcatel Thomson Espace, intéressée par la perspective de disposer de ce site d’essais, fait une proposition en ce sens à l’ESA avec l’entreprise Dateno et un tubiste américain. Elle n’aura pas de suite, du moins pour elle. C’est finalement le «projet» qui, sur les «retours» français, paye cette installation aux Anglais, à Dateno et au tubiste américain. Un mauvais goût restera un certain temps dans la bouche de l’équipe Alcatel Thomson Espace.
En ce qui concerne le matériel qu’ATES s’apprête à fournir ou à acheter à des partenaires européens, les éléments critiques sont français. Il s’agit notamment des lignes à ondes de surface, filtres dispersifs réalisant, à l’émission, l’étalement de l’impulsion radar avant amplification de puissance et, à la réception, sa compression après préamplification. Thomson-CSF/DASM (Valbonne) doit réaliser ces composants, et Jacques Richard part les rejoindre.
Pour sa part, au titre des équipements, ATES doit fournir une enceinte thermostatée de haute précision pour garantir la stabilité des performances, et toute l’électronique associée.
Thomson-CSF Montreuil a en charge les commutateurs en guide à ferrite qui, mis en anneau de six, permettent d’assurer les redondances de HPA et les interfaces avec les différentes antennes de l’AMI (véritable couteau suisse de l’espace, avec trois antennes «scatt» et une antenne SAR), ainsi que les limiteurs, destinés à isoler les récepteurs pendant l’émission de l’impulsion. Comme un radar doit recevoir exactement la fréquence d’émission, au Doppler près, cette fonction, qui ne peut être réalisée par filtrage, est vitale.
Thomson Montreuil a proposé un dispositif très performant qui élimine automatiquement toute impulsion dépassant un certain seuil, grâce à l’autopolarisation instantanée de diodes PIN. L’électronique proprement dite, notamment la partie à fréquence intermédiaire, doit être étudiée concurremment par Thomson-CSF/AVS (Malakoff) et ATES.
En particulier, la technologie «CMS» (composants montés en surface), maîtrisée par Malakoff pour l’avionique, doit, pour la première fois, être spatialisée par Toulouse.
Depuis la fin de 1983, la séparation entre la Division Espace et Thomson-CSF a commencé pour aboutir à la création d’ATES.
Les relations avec la Division AVS de Thomson-CSF, qui a apporté une assistance technique dans le domaine radar, doivent donc être définies d’une manière plus formelle qu’elles ne l’ont été au sein d’une même société. Un accord est négocié dans ce sens, non seulement pour le programme ERS 1, mais également pour tout ce qui peut concerner, dans l’avenir, les radars embarqués à bord des satellites.
Cet accord, signé le 5 juin 1985, s’inscrit dans le cadre de l’accord général signé entre la CGE et Thomson, où il est précisé que le domaine des matériels embarqués à bord de satellites est attribué à la CGE, Thomson-CSF conservant, bien entendu, son expertise dans le domaine des radars. Outre ce domaine particulier, il couvre également celui des matériels de visualisation dérivés de ceux développés pour Spacelab, les techniques de pointage utilisant le laser, les méthodes de localisation, de pointage et d’accostage pour les véhicules spatiaux, et l’utilisation de l’infrarouge et de l’holographie.
L’équipe industrielle
Parmi les fournisseurs européens d’ATES choisis pour les nécessités de retour industriel du fait du financement du programme ERS, il faut signaler deux faux départs. D’une part, Bell Telephone à Anvers, sollicitée pour réaliser le banc de test intégration du «RF subsystem», annonce que, surchargée, elle déclare forfait mais propose une société suisse, CIR, à Gals. D’autre part, Christian Rovsing, retenu pour réaliser quelques convertisseurs d’alimentation et le «Switch matrix controller», dépose son bilan. On fait alors reprendre les engagements de l’ancienne société par la nouvelle.
Les partenaires d’ATES comptent, outre les sociétés susmentionnées, Ericsson, chargée de réaliser les convertisseurs FI/RF et le générateur de fréquences, dont l’oscillateur ultrastable sera fourni par FEI.
Côté client, trois étages hiérarchiques s’occupent d’ATES : Marconi, Dornier et l’ESA. Marconi (MSDS : Marconi Space and Defence Systems) deviendra plus tard Matra-Marconi Space, et son usine de Portsmouth se partage entre le spatial et les torpilles, usine que le «groupe projet» local ignore jusqu’à l’achèvement de nouveaux bâtiments.
Pendant deux ans, l’équipe ERS est logée en plein Portsmouth, face au port et à l’entrée de l’arsenal, dans un bâtiment de bureaux en location appelé «Warrior House», du nom du premier vapeur de la marine britannique, visitable et mouillé à quelques mètres de ces bureaux.
Mais à l’époque, l’amateur de marine a quand même de quoi faire. Qui des visiteurs de l’équipe ERS de Marconi n’a pas «séché» une fois le repas de midi pour visiter, au sein de l’arsenal, le Victory, toujours officiellement en service, mais en cale sèche, et le Mary Rose,coulé devant l’île de White par son surarmement qui l’a rendu instable, et repêché quelques siècles plus tard en assez mauvais état.
Marconi est responsable de l’instrument AMI (Active Microwave Instrument), et dans ce cadre est le client direct. Ses activités industrielles, hormis le management, l’ingénierie et l’intégration de l’instrument, portent sur la réalisation de l’équipement de gestion de l’instrument en mode SAR et de numérisation du signal reçu, le SAR Processor, monstre (pour l’époque, où les «Asics» n’existent pas) avec ses 50 kilos d’électronique et sa face avant couverte de connecteurs. L’intégration de l’instrument est faite à Portsmouth, ainsi que les essais de «Multipactor».
Une tradition sur ERS 1 semble être le choix du chef de projet-instrument parmi les Écossais. D’abord, c’est Bill Jackson, un instant remplacé par Ian Mac Millan, et finalement remplacé par Joe Mac Caughey.
Dornier, à Friedrichshafen, est responsable de l’ensemble du satellite, et donc le client de Marconi. L’interlocuteur d’ATES est pendant la durée de l’affaire Hermann Bottger, secondé par un autre ingénieur, qui est, pendant un temps, Félix Petz, aujourd’hui à l’ESA, à qui succédera Jurgen Fritz.
L’équipe ESA de l’AMI est pilotée par un Allemand, Georg Graf, secondé par deux Anglais, Bob Gelsthorpe et David Hounam, et un Espagnol, Juan Guijarro. Il n’y a pas, pour ainsi dire, de réunion contractuelle, avancement, revue, mise en recette, etc. chez ATES ou l’un de ses fournisseurs sans que les trois organismes clients participent, et souvent à plusieurs ingénieurs.
La bataille des spécifications
Dès le démarrage, ATES est en retard, ce qui est humain ! Ce qui l’est moins, c’est la situation des clients. La définition du système est peu mûre et l’encre pour écrire des spécifications se fige, en particulier chez Marconi.
L’équipe projet toulousaine est prise en étau entre des laboratoires qui affichent des délais peu conformes à ce que demande le client et exigent de voir figer leurs demandes, et le client qui trouve assez prématuré de s’avancer à préciser ce qu’il veut, tout en souhaitant être livré à l’heure.
Elle doit donc investir dans la rédaction des spécifications Alcatel en prenant en compte sa connaissance de l’état technique du projet, et indiquer au client que faute d’autre chose de sa part, ou d’un signal d’arrêt clair, c’est sa base technique qui deviendra contractuelle.
Marconi ne revient vers ATES qu’un an après avec un document de son cru pour chacun des sous-systèmes. Il y a, bien sûr, des écarts à chaque ligne, ou presque. Plusieurs mois sont nécessaires, des séminaires ad hoc et l’action des clients de rang supérieur pour qu’un accord soit trouvé. Celui-ci entraîne une vague de demandes de modifications contractuelles qui s’ajoute à celle liée au démarrage chaotique de l’affaire.
Ces deux premières vagues sont traitées dans le cadre de la négociation du contrat de phase C/D qui règle le sort d’une soixantaine d’entre elles. Sur la totalité de la durée de l’affaire, plus de cent modifications contractuelles seront émises, et une quantité raisonnable d’entre elles acceptées avec un délai moyen de l’ordre d’un an.
Le contrat de phase C/D
Compte tenu du risque technique de l’affaire et du manque de références techniques tant du client ESA que des industriels, le contrat de phase C/D est pour les principaux contractants un contrat en dépenses contrôlées avec intéressement. ATES peut bénéficier d’un tel contrat.
Ses fournisseurs, dans le groupe Thomson ou ailleurs, ont par contre des contrats à prix fixes. Il faut plus d’un an pour conclure les accords sur les conditions des contrats avec les fournisseurs, l’ESA intervenant directement dans la phase finale de négociation des prix, quel que soit le niveau du fournisseur dans l’organisation du projet.
En ce qui concerne ATES, le problème le plus difficile à résoudre est celui des taux horaires, bien plus important que les multiples modifications identifiées depuis l’offre, le gonflement de devis que le contrôleur de projet François Witrand recueille, ou le montant même du prix objectif à atteindre, point de départ du calcul de l’intéressement.
En effet, les taux horaires ont à peu près doublé depuis la proposition, car à l’époque l’activité spatiale n’est qu’un département d’une division de Thomson dont elle reprend les EGC (éléments généraux de coûts) établis sous le contrôle de l’Administration. La filialisation et le transfert à Toulouse, avec des moyens techniques et industriels adaptés mais spécifiques, ont eu un impact certain sur les taux horaires. C’est une chose à faire accepter à l’ESA, car dans un marché en dépenses contrôlées, le taux horaire est un facteur commun de toutes les recettes.
La négociation conduite par Jean-Benoît Nocaudie dure de longs mois au terme desquels les taux proposés sont acceptés par le client, grâce au soutien du CNES et de la DGA. L’ESA fait même preuve de bienveillance dans la fixation des termes des intéressements, notamment sur les points techniques où il est possible de faire «carton plein». Toutefois, un désaccord concernant l’intéressement de «solidarité» sur les performances en vol du satellite reporte à plus tard la signature du contrat.
Toute la phase C/D est en fait financée par des engagements provisoires de l’ESA (Limit Of Liability), et le contrat final n’est signé que très peu de temps avant le lancement du satellite.
La bataille des plannings
Le programme a démarré d’une manière classique : tout le monde est déjà en retard. Notamment, Alcatel Thomson Espace, qui affiche des délais très importants pour le développement des équipements les plus complexes : «calibration unit» et «IF radar», tous deux contenant des dispositifs à ondes de surface dans des enceintes thermostatées et ayant recours à la technologie «CMS».
Et encore, le chef de projet ne montre pas ce que le Département Équipement lui transmet, mais ce qu’il souhaite obtenir ! À cette époque, il apprécie tout particulièrement Ericsson qui n’éprouve aucune difficulté à fournir des plannings conformes aux exigences de l’affaire, et il les donnerait volontiers en exemple à la Division Équipement (DEQ). Il est vrai que l’équipe est encore jeune dans le métier !
Les livraisons de maquettes fonctionnelles et les «PDR» (Preliminary Design Review) se passent à peu près bien pour tous les fournisseurs, et le test en intégration du «RF system» commence. Cette opération, heureusement non contractuelle et en temps masqué par rapport aux travaux sur les MI (modèles d’identification) contractuels, dure le temps nécessaire pour que le banc de test livré par CIR fonctionne, c’est-à-dire un bon semestre et quelques nocturnes. Le peloton commence à s’étirer pour les livraisons de MI et les «CDR» (Critical Design Review).
Les vrais ennuis apparaissent alors : Ericsson revendique la place du cancre. «Unfortunately…» est la formule de reporting la plus fréquente. Thomson Montreuil a des ennuis techniques sérieux sur son limiteur miracle : les diodes, leur technologie d’assemblage, le montage, le «multipactor», tout y passe.
Le «circulator assembly» apparaît critique pour d’autres raisons, il faut d’abord trouver le bon «ferrite», qui encaisse la puissance mais présente peu de pertes. Gérard Forterre trouve finalement la bonne formule, avec juste ce qu’il faut de dysprosium. En parallèle, la réalisation des modèles de vol devrait démarrer.
L’ESA a mis en place sur cette affaire une centrale commune d’approvisionnement de composants, afin d’ouvrir le programme aux industriels de petite taille incapables d’approvisionner dans des conditions économiques des composants «Hi-rel», et, pour «amortir l’opération», l’a rendue obligatoire pour tous. ATES a dénoncé cette approche, mais, devant la pression de l’ESA, s’est inclinée, à l’exception des transpondeurs pour lesquels l’approvisionnement des composants est fait globalement par tranches de cinq équipements.
La plupart des composants doivent être fournis par l’une des deux centrales retenues, IGG (Grande-Bretagne) pour les composants européens, et TRW pour les composants US et japonais. Comme les dates de besoin des différents équipementiers sont très proches, il en résulte un embouteillage des centrales, aggravé par les évolutions des listes, et les retards dans les expressions de besoins.
À l’heure où le câblage devrait commencer, malgré la gesticulation de rigueur auprès des agences, les magasins de Toulouse sont vides. C’est alors que, dans l’intérêt suprême du programme, ATES propose d’ouvrir ses tiroirs et d’utiliser ses composants en stock, reliquats d’affaires précédentes, pour avancer le câblage des équipements critiques, avec l’avenant correspondant qui est accepté.
Un nouveau fournisseur
Les nouvelles de Montreuil sont mauvaises depuis un certain temps, en ce qui concerne le limiteur. Les diodes «de vol» ont pu être fabriquées mais la structure porteuse, l’équipement proprement dit, est percluse de problèmes mécaniques, maintien des diodes, multipactor, dégazage, etc. L’ESA s’inquiète sérieusement du fait que les problèmes se multiplient alors que les solutions se font attendre.
L’équipe de Toulouse est convaincue de la viabilité du principe, elle l’est moins des talents de l’équipe de Montreuil. La question d’une solution alternative est de plus en plus précisément évoquée, et Alcatel Thomson reçoit l’action d’instruire le dossier. MaCom GB, qui avait réalisé un commutateur pendant la phase des prédéveloppements, et EMS (Atlanta) sont alors consultés.
Il faut abandonner la solution automatique pour une solution commandée, moins simple mais ici plus facile à maîtriser techniquement. Cela entraîne quelques modifications dans le harnais et le séquenceur. EMS est choisi, et après d’âpres discussions où ATES doit se faire prier pour admettre la nécessité d’une solution alternative, il est admis que le contrat EMS sera payé par l’ESA, les modifications du reste de la charge utile devant être payées par Alcatel si Thomson Montreuil reste défaillante, ou par l’ESA si le matériel Thomson est fourni et qualifié en temps utile.
Cette décision soulage tout le monde, et l’ESA est assez surprise de voir avec quel dynamisme l’équipe de Toulouse met les choses en place ! Quant à Montreuil, devenu Tekelec, il rate largement le train ERS 1. Si la livraison d’un limiteur de vol qualifié a lieu avant le tir ERS 2 et est fêtée dignement par une soirée au Paradis latin, l’ESA ne fait pas l’effort de le monter en remplacement du matériel EMS déjà en place.
Migrations
C’est à peu près vers l’époque de la livraison des MI que le chef de projet se trouve confronté à un problème particulier : la fuite de ses équipes vers l’ESA. Elles y sont encore de nos jours. Yvon Menard, responsable du calibrage ; Christian Bassoua, responsable EMC ; Bruno Naulais, ingénieur intégration ; Jean-Luc Gerner, qui fait la conception de la «FI radar», tous quatre prennent le chemin de Noordwijk.
Cette vague est d’une certaine manière le pendant de la vague d’embauches par ATES de personnels de l’équipe Observation de l’ESA, lorsqu’elle fut transférée de Toulouse à Noordwijk en 1983.
L’enlisement nordique
Les soucis en matière de livraison de matériel se focalisent très vite sur Ericsson, les MI sont particulièrement en retard et doivent être profondément modifiés pour être acceptés ; pour les MV (modèles de vol), la conception n’est pas davantage maîtrisée, et les règles de qualité font obstacle aux solutions retenues pour faire marcher les MI. L’équipe locale, très jeune et très dynamique, n’a pas son pareil pour boire les paroles des visiteurs mécontents, reconnaître ses torts, prendre toutes les actions possibles… et, apparemment, ne rien faire jusqu’à la prochaine visite.
Devant cette technique de l’édredon, il reste l’arsenal habituel : «management meeting» à l’ESTEC, mise en place d’un résident (de nationalité française), missions hebdomadaires («unfortunately» se dit «Tüvair» en suédois, le chef de projet de l’époque s’en souvient encore !), étude de solutions alternatives, tout cela continue jusqu’au lancement. L’intégration des sous-systèmes se fait en grande partie sans le matériel de vol Ericsson, qui est livré au dernier moment.
Après la livraison
Les dernières livraisons des modèles de vol d’ATES ont lieu courant 1989.
Il est possible de revoir ERS à Toulouse quand le satellite complet est testé dans les installations d’Intespace, puis il part à Kourou. Le premier créneau de tir prévu pour le 3 mai 1991 est, suite à une alerte sur le système de propulsion d’Ariane, repoussé de deux mois jusqu’au 16 juillet, où le vol 44 quitte la Guyane.
Quelques jours après, l’ESA publie la première image radar : une vue des côtes de Hollande faite indépendamment de la couverture nuageuse. On peut contempler les structures dessinées par la variété des gris de la mer, en fonction du niveau des vagues, des courants et des sillages de navires. Les antennes de l’AMI se sont bien déployées, et l’instrument fonctionne dans sa totalité. Plusieurs années d’efforts sont récompensées. Et puis, pour les amateurs de formalisme, on peut signaler la signature du contrat en juin 1991. C’est quand même avant le tir, mais il faut qu’Ariane y mette du sien.
ERS 2, le frère cadet
Un deuxième satellite est, à l’origine, prévu en option. Les difficultés de financement l’ont fait rapidement disparaître des plans et des budgets. Le succès technique d’ERS 1 incite l’ESA à lancer la réalisation d’un deuxième modèle de vol.
Côté ATES, pour s’accommoder du budget français disponible après la prise en compte de la plate-forme MATRA, il faut trouver des économies ou des transferts. ATES se limite à fournir des équipements non intégrés, Marconi prenant à sa charge l’intégration des sous-systèmes sur le panneau, ainsi que le management des sous-traitances d’Ericsson, en soulignant que l’affaire Eutelsat les oblige par ailleurs à être très présents à Goetoborg, chez Ericsson qui est l’un des fournisseurs.
De même, Alcatel Kirk voit ses tâches augmentées par la fabrication sur plans, dite «built to print», de la paire de séquenceurs et des convertisseurs d’alimentation des équipements «calibration et IF radar», naguère produits par Toulouse.
Roger Saturnin est désigné chef de projet, et la phase C/D débute à l’automne 1990 avec un contrat à prix fixe qui est signé début avril 1992.
Bien qu’en principe identique à son frère aîné, ERS 2 a droit à quelques ennuis inédits. L’un d’entre eux est, après la perte d’une broche de connecteur sans raison apparente, le rebut complet des dispositifs à ondes de surface modèles de vol produits par Thomson/DASM, victimes de «stress corrosion», suite à un nettoyage malencontreux avec un produit chloré.
Le «circulator assembly» MV2 est, lui aussi, rebuté suite à une intervention malheureuse. Cette pièce imposante ne pouvant être refaite dans les délais, c’est le modèle de rechange, précédemment écarté pour ERS 1, qui est choisi et qui vole. ATES a la satisfaction de livrer avant Ericsson qui, dans l’ensemble, n’a pas démérité sur ce contrat et apporté un certain nombre de solutions à ses difficultés précédentes.
Le satellite est lancé le 21 avril 1995. Quand sa recette commence, quelques difficultés se font jour. Notamment, des arrêts de l’instrument en mode imageur sont observés. L’enquête montre que le dispositif de protection du radar contre un TOS trop élevé de la voie émission n’est pas réglé comme il faut. Petit savoir-faire qui n’a pas traversé la Manche ? Quoi qu’il en soit, il faut apprendre à vivre avec ce défaut. Par ailleurs, de l’effet «Corona» est observé dans les tout premiers temps de la vie orbitale de l’instrument, problème attribué à un dégazage insuffisant du satellite à la première mise sous tension.
Depuis cette date, la principale menace qui pèse sur les deux satellites est sans doute la suppression possible d’une ligne budgétaire suffisante pour que l’ESA puisse assurer les opérations nécessaires à leur usage en orbite, lesquels n’ont aucune vocation commerciale, contrairement au programme canadien Radarsat, mis en orbite après les deux ERS.
Les transpondeurs d’ERS
En parallèle avec les péripéties qui marquent la fourniture des sous-systèmes de l’AMI, ATES doit fournir, pour les satellites ERS 1 et ERS 2, les transpondeurs du sous-système TM-TC de la plate-forme. Celle-ci étant la même que pour les satellites SPOT où ATES a déjà été retenu pour cette fourniture, il n’y a aucune compétition et l’affaire ne donne lieu à aucun problème particulier.
Deux modèles de vol et un modèle de rechange de transpondeurs de la première génération sont livrés pour ERS 1.
Pour ERS 2, la deuxième génération de transpondeurs existe déjà, mais certaines interfaces étant différentes, des modifications ont été nécessaires. Par mesure d’économie, l’ESA n’accepte pas cette solution et se contente d’utiliser le modèle de rechange déjà livré pour ERS 1 et de commander un seul modèle de vol supplémentaire de la première génération.
6.4 – Les programmes militaires
Les premières affaires militaires
L’environnement initial
Contrairement au domaine des applications civiles des satellites auquel le CNES donne une impulsion significative dès sa création en 1962, l’utilisation des satellites à des fins militaires ne suscite, en France, avant la fin des années soixante-dix, que peu d’intérêt, tout au moins apparent, auprès des autorités qui pourraient être concernées.
Certes, le domaine des lanceurs, qui représente une suite logique aux importants efforts consentis dans celui des missiles balistiques, donne lieu aux remarquables développements qui aboutissent, dès 1965, à la mise en œuvre du premier lanceur de la série Diamant. Le soutien des agences militaires à ce programme est sans aucun doute décisif pour son succès mais il faut noter, malgré tout, qu’aucun lanceur Diamant n’aura l’occasion de mettre en orbite un satellite d’application militaire.
Dès 1962, Vladimir Altovsky, à la tête du Bureau des Activités Spatiales de Thomson, et les commerçants de plusieurs unités ont commencé à rendre de fréquentes visites à des agences telles que la DRME (Direction des Recherches et des Moyens d’Essais) ou la DTEN (Direction Technique des Engins) pour proposer des études liées aux applications militaires des satellites. Du côté de CSF, avec Jean-Claude Simon à la tête du groupement d’études spatiales, des démarches analogues ont, bien entendu, été effectuées.
Pendant un certain nombre d’années, les résultats sont maigres car seul l’intérêt exprimé des états-majors pourrait encourager les responsables des organismes d’études, dont la bonne volonté est évidente, à consacrer des crédits substantiels aux études en question.
Les études préliminaires
Pour tenter d’éveiller cet intérêt, quelques études de faisabilité sont entreprises. Les orientations choisies oscillent périodiquement entre plusieurs applications : l’observation, l’écoute radioélectrique et les télécommunications, sans qu’une ligne directrice continue ne puisse être établie en faveur de l’une d’elles.
La première étude de quelque importance, baptisée Sarah, qui est confiée à Thomson en 1965, porte sur l’écoute et l’identification des émissions radioélectriques, et plus particulièrement sur celle des radars implantés dans les pays de l’Est. Comme il a déjà été exposé au chapitre consacré au début des activités spatiales à Thomson, elle est effectuée en collaboration par la Division RTT (Radiodiffusion, Télévision, Télécommunications) de Gennevilliers et le GSER (Groupement Systèmes Électroniques et Radars) de Bagneux.
L’espoir de projets aboutissant à des réalisations concrètes se fait attendre. Une enquête effectuée en 1970 par la DAM (Direction des Affaires Militaires), dirigée par Raymond Paul, révèle qu’aucun programme de satellite d’application militaire ne pourra être décidé avant 1975.
Parmi les études envisagées à cette date figurent :
– une suite possible, sous la forme d’étude des procédés d’accès multiples, à une étude de satellite de télécommunications militaires dérivé de Symphonie, passée par la DRME et baptisée Artemis ;
– une étude, baptisée Sytosat, d’un satellite destiné à doubler les moyens de transmission de l’ordre de mise à feu des armes nucléaires ainsi que de l’ensemble du système comprenant des stations terriennes. Pour cette étude, qui doit en principe utiliser au maximum des éléments du satellite Symphonie, le client recommande une collaboration entre Thomson-CSF et l’Aérospatiale ;
– une étude des moyens à mettre en œuvre pour l’utilisation, à des fins de localisation, des signaux des satellites américains Transit ;
– un avant-projet de satellite d’écoute des émissions radioélectriques, baptisé Satrape, pour lequel Thomson-CSF a quelques chances d’obtenir la maîtrise d’œuvre.
La proposition pour l’étude Satrape est remise à la DTEN (par la Division MAS) au début de 1970. Elle comprend une participation de MATRA pour la définition du satellite.
Par la suite, en octobre 1970, et avant que le marché ne soit passé, MATRA fait savoir qu’il ne souhaite plus collaborer avec Thomson-CSF.
Entre-temps, le Département ESA a été créé et c’est le Service Systèmes Spatiaux, dirigé par Claude Skenderoff, qui est chargé de l’étude.
Un autre marché, dérivé du projet Sytosat, porte sur la «transmission d’ordres par satellite».
Durant les quelques années qui suivent, les actions commerciales entreprises sont quelque peu compliquées par des imprécisions sur l’attribution des diverses responsabilités au sein de Thomson-CSF.
Au siège, par exemple, dont l’organisation nouvelle a été mise en place à l’occasion de la fusion de Thomson et de CSF, le Bureau des Activités Spatiales (BAS), chargé de la promotion dans le domaine spatial, dépend de la Direction des Affaires Civiles (DAC), dirigée par Marc de Saint-Denis. Les affaires militaires sont prises en charge par la Direction des Affaires Militaires, dirigée par Raymond Paul. Il faut quelque temps pour que, à la lumière de l’expérience, les actions de ces deux organismes en arrivent à se coordonner et à éviter toute interférence nuisible au succès des démarches.
D’autre part, si l’attribution du domaine des satellites, civils ou militaires, au Département ESA est incontestée, il n’en est pas de même pour les études concernant le segment sol et quelques aspects «système».
Le système NICS-Satcom de l’Otan est en cours de réalisation et l’affaire est suivie par la Division Systèmes Électroniques (DSE).
Si, dans ce système, Thomson-CSF n’a aucun espoir raisonnable de participer à la construction d’éventuels satellites, qui doivent être américains, il n’en est pas de même pour le segment sol.
La DSE est chargée de suivre ce programme. La Marine nationale, par l’intermédiaire du STCAN, exprime un certain intérêt pour l’étude d’une station embarquée.
Elle suit également de près la possibilité d’utiliser, pour ses liaisons, le satellite militaire britannique Skynet, soit en faisant développer des stations en France, soit en achetant des stations déjà développées à l’industriel anglais Marconi. Il semble inutile de préciser que l’éventualité de la seconde solution provoque une vive réaction de la part de Thomson-CSF.
Un problème se pose au sein de Thomson-CSF quant à la responsabilité du développement de telles stations car, si le pilotage de ce genre d’affaire militaire a été, en principe, attribué à DSE, le groupement d’intérêt économique Telspace a été spécialement créé pour recevoir les marchés de stations terriennes, tout au moins dans le domaine civil.
Après quelques échanges de notes suivis de négociations, DSE se voit confirmer la responsabilité du pilotage, étant entendu qu’elle sous-traitera certains travaux aux unités compétentes. C’est ainsi que la Division Télécommunications (DTC) prend en charge l’étude des modems SSMA.
La Division DSE peut finalement, après de longs efforts, obtenir du SCTI un marché pour la réalisation d’une maquette de station terrienne baptisée Sextius et fait, pour cela, appel à la collaboration des Divisions DFH, DRS (Radars de Surface) et DTE (Tubes Électroniques). Cette station est installée sur le site du CELAR, près de Rennes, et exploitée en «calibration» sur le satellite Symphonie. Les suites de ce programme sont mentionnées au chapitre SYRACUSE. Le chef de projet est Robert Ouriou.
Sur le plan général, la coordination des démarches commerciales est d’autant plus difficile à mettre en œuvre que les organismes d’études susceptibles d’intervenir à plus où moins long terme dans le domaine spatial sont relativement nombreux : DRME (Direction des Recherches et Moyens d’Essais), DTEN (Direction Technique des Engins), STTA (Service Technique des Télécommunications de l’Air), SCTI (Service Central des Télécommunications Interarmes), STCAN (Service Technique des Constructions et Armes Navales), et, enfin, CELAR (Centre d’ÉLectronique des ARmées).
À son niveau, et tout en s’efforçant de maintenir un minimum de coordination avec la DAM, le Service Commercial du Département ESA maintient un contact quasi permanent avec la plupart des services ci-dessus et parvient à obtenir quelques marchés d’étude.
On peut citer, en particulier :
– pour la DRME, un marché d’étude d’un avant-projet de satellite militaire de télécommunications ;
– pour la DTEN, un marché d’étude des nuisances causées à la Défense nationale par l’utilisation des satellites.
Les deux marchés sont obtenus en 1973.
Certaines actions commerciales sont menées en liaison avec l’Aérospatiale qui, depuis 1973, a entrepris la promotion d’un futur lanceur, baptisé LS434, et de charges utiles potentielles pour ce lanceur.
L’Aérospatiale mène, auprès du SCTI, une action commune avec Thomson-CSF pour promouvoir un satellite militaire de télécommunications léger (70 kilos) adapté à ce lanceur.
La réalisation de ce satellite est proposée pour un début en 1976 et pourrait être suivie, à partir de 1985, par celle d’un satellite «lourd» adapté à un lanceur lourd baptisé L3S.
Au milieu de 1974, l’Aérospatiale organise aux Mureaux, avec la participation de Thomson-CSF, dont le Département ESA, une présentation du projet de satellite militaire léger de télécommunications à laquelle sont notamment invités des représentants des états-majors.
Les résultats en sont décevants, un certain nombre des invités ayant nettement indiqué que l’utilisation de satellites pour les transmissions militaires paraissait beaucoup trop onéreuse en comparaison avec les services qui pourraient être rendus. Par exemple, les liaisons avec Djibouti sont, de l’avis de l’un d’entre eux, suffisamment bien assurées par les vieux postes HF du modèle 399 et un avion KC135 servant de relais.
Il faut bien se rendre compte qu’en dépit de l’intérêt manifesté par les seuls représentants de la marine, beaucoup de travail reste à faire avant que l’utilisation des satellites puisse être admise.
Le premier (faux) départ
C’est à partir de 1975 que semble se dessiner un intérêt réel pour un satellite militaire d’observation optique.
Le Département DSP (ex-ESA) se voit confier, en coopération avec l’Aérospatiale, une suite d’études préliminaires dans le cadre d’un programme appelé Tebaldi, financé par la DTEN. C’est l’origine du programme SAMRO (Satellite d’Application Militaire de Reconnaissance Optique) prévu pour être opérationnel.
L’objectif de DSP est d’obtenir la responsabilité des équipements assurant le traitement des signaux à bord et leur transmission vers le sol avec, si possible, celle du sous-système qu’ils constituent. La responsabilité du sous-système TM-TC est également recherchée.
Afin d’assurer une part dans le système complet aux unités de Thomson-CSF compétentes pour développer les équipements de réception au sol, la revendication porte en fait sur la responsabilité de l’ensemble de la «chaîne image».
Cette revendication se heurte, dès la fin de 1975, à celle de la SEP (Société Européenne de Propulsion) qui, bien que spécialisée dans le domaine des moteurs de fusées, recherche une possibilité de diversification dans celui des stations de réception et de traitement au sol des signaux émis par les satellites d’observation optique.
Après quelques passes d’armes au cours de réunions tripartites organisées par l’Aérospatiale, les chances de compromis apparaissent relativement faibles, chacune des parties insistant pour avoir la maîtrise d’œuvre des stations terriennes, tout en étant d’accord pour en sous-traiter une partie à l’autre.
Au niveau de la maîtrise d’œuvre du satellite, il faut s’attendre, et ce sera le cas, à une compétition entre l’Aérospatiale et MATRA, DSP ne s’estimant pas compétent pour assumer cette responsabilité dans ce genre de satellite.
Le début de la phase A de l’étude de SAMRO est programmé pour avril 1979, la décision d’engagement du programme étant attendue pour avril 1980, avec le début de la phase B en juillet 1980.
En décembre 1978, une décision de la nouvelle Direction de la Division Faisceaux Hertziens (DFH), dont DSP fait partie, retire au Département la responsabilité des systèmes comportant satellites et équipements au sol pour la confier à la DEPA. Cette unité, jusqu’alors chargée des travaux d’installation des stations de faisceaux hertziens, est désormais chargée du système SAMRO et va devoir prendre en charge l’étude et le développement d’une chaîne image de satellite d’observation.
Le chef de projet désigné pour le système est Pierre Houzelot, Jean-Claude Héraud restant responsable de la partie satellites à DSP. Sur le plan commercial, la responsabilité de la proposition passe au Service Commercial de DFH, jusque-là spécialisé dans le domaine et vers la clientèle des faisceaux hertziens, le Service Commercial de DSP devant dès lors lui apporter son assistance.
À partir de cette date, DSP consacre donc uniquement ses efforts aux équipements de la charge utile et au sous-système télémesure-télécommande.
L’apparition en 1978 du programme civil d’observation SPOT, où DSP se voit confier en 1979 la responsabilité de la télémesure charge utile (TMCU), de l’électronique des instruments HRV ainsi que des transpondeurs de TM-TC, aura une certaine influence dans l’attribution des tâches dans le satellite SAMRO.
Tout naturellement, les actions de DSP sont orientées en vue de tirer profit d’une synergie entre les deux programmes malgré le handicap constitué par le fait que, s’il a le contrôle entier des actions vis-à-vis du programme SPOT, celui du programme SAMRO lui échappe en partie.
Les instructions de la DAM ont initialement préconisé une coopération avec l’Aérospatiale mais il est bien entendu prudent de ne pas écarter la possibilité que MATRA devienne le maître d’œuvre du satellite.
Les propositions pour la contribution de DSP à la phase A sont préparées en parallèle en direction de l’Aérospatiale et de MATRA. Elles sont basées sur une participation analogue à celle prévue pour SPOT, c’est-à-dire la responsabilité de la chaîne image, de la chaîne télémesure-trajectographie et de la télécommande opérationnelle de la charge utile avec, en plus, dans le cas de l’Aérospatiale, une participation aux études «système» au sein du groupe de projet.
Les travaux de la phase A se déroulent sans événement notable. Au milieu de l’année 1980 se pose le problème du choix du maître d’œuvre.
Parallèlement à la phase A de définition du système, se déroule une compétition pour l’étude et la fourniture de l’instrument optique du satellite. MATRA ayant gagné la compétition pour l’instrument de SPOT, on peut s’attendre à la même décision pour l’instrument de SAMRO. Or c’est l’Aérospatiale qui l’emporte.
Pour la suite des opérations, l’Aérospatiale est désignée, en avril 1980, comme maître d’œuvre du système, et MATRA comme maître d’œuvre du satellite.
L’interlocuteur de DSP pour la participation au satellite est donc désormais MATRA, qui invite DSP à négocier un partage de ce qu’il est convenu d’appeler la «case équipements» du satellite, c’est-à-dire :
– le sous-système de traitement à bord des signaux d’image ;
– la télémesure image chargée de transmettre ces signaux vers le sol ;
– la télécommande protégée des équipements du satellite.
La négociation est particulièrement serrée car l’objectif de DSP, fort de sa participation déjà prévue au satellite SPOT, vise à obtenir la maîtrise d’œuvre des trois sous-systèmes en question et la fourniture de tous leurs équipements. DSP obtient une totale satisfaction pour la télémesure image et pour la télécommande protégée.
La maîtrise d’œuvre du sous-système de traitement est finalement attribuée à DSP, étant entendu que certains de ses équipements seront sous-traités à MATRA. Une seule boîte du sous-système reste en litige et il est décidé que, le moment venu, sa fourniture sera mise en compétition entre les deux sociétés.
DSP a obtenu le maximum possible, c’est-à-dire la maîtrise d’œuvre de chacun des sous-systèmes de l’électronique de bord. Malheureusement, cet accord a été négocié par le Directeur de DSP.
La Direction de la Division DFH estime que ce dernier a outrepassé ses pouvoirs en menant seul cette négociation et, en novembre 1980, elle fait savoir à la Direction de la branche Espace de MATRA qu’en aucun cas elle ne reconnaîtra la validité de l’accord.
Bien entendu, MATRA en profite pour reprendre les concessions qu’il a faites et il ne sera plus jamais question pour Thomson, et donc DSP, de conserver la maîtrise d’œuvre du sous-système de traitement. Seules des sous-traitances d’équipements peuvent lui être attribuées et cela risque d’être la cause du transfert vers MATRA de connaissances acquises à l’occasion du programme SPOT.
Les travaux de phase B sont entrepris sur ces bases. À DSP, au sein du Service SS2 dirigé par Jean-Claude Héraud, les principaux travaux sont menés par Jean Rozes et Guy Schang.
À partir de janvier 1982, la Division Espace a été créée, ce qui a permis de resserrer les liens entre l’équipe chargée du satellite et celle chargée du système, qui est désormais dirigée par Claude Michaud. En fait, la participation aux travaux sur le système avec l’Aérospatiale ne pourra jamais se concrétiser.
Des bruits alarmistes commencent à circuler sur une annulation possible du programme SAMRO, laquelle est effectivement annoncée en août 1982.
Entre-temps, le projet d’utilisation de Telecom 1 à des fins dites «gouvernementales» a été annoncé et, à partir de 1979, le système de télécommunications par satellites, baptisé SYRACUSE 1, va constituer le point de départ de l’utilisation concrète des satellites par les armées françaises.
L’aspect «charge utile» en est relaté dans le chapitre Telecom 1 et l’aspect «système» fait l’objet d’un chapitre particulier appelé SYRACUSE.
Les programmes militaires SYRACUSE I
À l’automne 1978, un rapport rédigé par DSE (Division Systèmes Électroniques de Thomson-CSF) est remis aux militaires : c’est le point de départ des transmissions militaires par satellite pour notre nation. Saluons ici au passage l’opiniâtreté de l’amiral Bovis, chef du Bureau TEI (Bureau Technique de l’Électronique et de l’Informatique) à l’État-Major des armées, initiateur clairvoyant et futuriste, ainsi que notre ami Louis Colliaux, ancien ingénieur de Thomson-CSF/DSP, qui avait, contraint, quitté toute activité pendant une longue période suite à une douloureuse maladie, et que nous avions la grande joie de retrouver comme animateur de cette expérimentation au CELAR (Centre ÉLectronique de l’ARmement). Il participera ensuite, pendant quelques années, jusqu’à son décès en 1988, à l’élaboration et au développement des matériels actuellement en service.
La Direction Générale des Télécommunications (Jean Grenier de la Direction des Affaires Industrielles et Internationales) est en relation avec l’État-Major des armées (amiral Bovis) pour intégrer éventuellement une charge utile militaire (7/8 GHz) sur le satellite Telecom 1.Cependant, on rencontre à la fois des problèmes de budget pour les militaires qui, jusque-là, ne considéraient pas les satellites de télécommunications comme indispensables, et des risques techniques, puisque le satellite Telecom 1, premier satellite de télécommunications français, aurait une grande complexité avec trois bandes de fréquences.
Avec l’aide de Jacques Chaumeron, Directeur de DSP (Département Espace-Satellites de Thomson-CSF), qui peut garantir la faisabilité technique de la charge utile, Gérard Coffinet, ex-ingénieur en chef de l’armement, spécialiste des transmissions de la marine, Directeur Commercial de DFH (Division Faisceaux Hertziens de Thomson-CSF), convainc les différents services de la Direction Générale de l’Armement (à savoir : le Service Central des Télécommunications et de l’Informatique : l’IGA Alberge et l’IGA Dages, et les Services Techniques des Constructions et Armes Navales : l’IC Gueldry) de l’intérêt de mettre en place le système SYRACUSE I (SYstème de RAdioCommunication Utilisant un SatellitE) sous le pilotage de l’État-Major des armées.
Il convainc également la Direction Générale de Thomson-CSF (en particulier Jean-Pierre Bouyssonnie et Raymond Paul) de la nécessité de créer au sein de DFH une section commerciale militaire afin de coordonner de l’intérieur comme de l’extérieur l’activité spatiale militaire qui prend vraiment son essor. Jean Rémondin, ex-technicien du Radar, alors ingénieur commercial à DRS (Division Radars de Surface), est muté début 1979 de Bagneux à DFH Levallois pour assurer la responsabilité commerciale de ces activités auprès de Gérard Coffinet.
Dans les laboratoires de Levallois, Pierre Luginbuhl et André Le Roux, avec leurs ingénieurs, «fignolent» les spécifications techniques de préétude d’un système dont les premières expressions de besoin ont été dictées par l’ICA Dages.
En février de la même année, le Gouvernement prescrit au secrétariat d’État aux Postes et Télécommunications et au ministère de l’Industrie le lancement d’un satellite opérationnel de télécommunications baptisé Telecom 1, et sa mise en service en 1983. Une partie de ce satellite doit être réservée à la satisfaction des besoins du ministère de la Défense : «doter les forces implantées outre-mer, les forces navales, et éventuellement en secours les forces agissant en Europe, de moyens de transmissions fiables et protégés avec les autorités métropolitaines». Le programme spécifiquement militaire SYRACUSE est né.
Les caractéristiques générales de SYRACUSE I
Le programme SYRACUSE I permettra la réalisation de liaisons protégées en télégraphie, transmissions de données et téléphonie numérique, entre divers types de stations. Il est constitué des éléments à incorporer au segment spatial de Telecom 1, de stations fixes métropolitaines, de stations mobiles transportables et légères, ainsi que de stations navales qui seront embarquées sur les navires de la Marine nationale.
L’objectif fixé aux P&T est de mettre à poste deux satellites géostationnaires à 5° et 8° ouest (dont un en réserve), qui pourront couvrir le territoire de la France métropolitaine et une partie de l’Europe, ainsi que les départements et territoires français d’outre-mer, de la mer des Antilles à l’océan Indien.
Le système Telecom 1 utilisera les bandes 14/12 GHz pour les services intraentreprises et vidéotransmission, 8/7 GHz à usage spécifiquement militaire (SYRACUSE) et 6/4 GHz pour les liaisons téléphoniques et de télévision avec les Dom-Tom.
La capacité offerte en téléphonie est de 125 Mbit/s pour les liaisons intraentreprises, et supérieure à deux mille voies téléphoniques pour les liaisons avec les Dom-Tom.
Le satellite est constitué d’une plate-forme emportant une charge utile de douze répéteurs.
MATRA est le maître d’œuvre du satellite et le réalisateur de la plate-forme. Le Département Espace-Satellites (DSP) de Thomson-CSF est responsable et réalisateur de la charge utile.
L’organisation étatique
Un groupe de projet est mis en place à la DGT avec à sa tête l’ingénieur en chef des télécommunications Ramat, bien connu et apprécié de nos techniciens. Il aura la responsabilité de la réalisation et de la commercialisation du système. Un comité de programme paritaire DGT/CNES est chargé de la conception et de la réalisation du segment spatial : satellite, lancements et stations terriennes de contrôle.
Le premier lancement est prévu en juillet 1983, le deuxième trois mois plus tard, et la mise en service après la recette du deuxième satellite lancé.
Le programme SYRACUSE I
Le programme militaire SYRACUSE I comprend donc la définition fine des spécifications techniques d’ensemble du système et de la charge utile correspondante, le développement et la réalisation d’une vingtaine de stations terriennes.
Le coût est de l’ordre de 400 millions de francs en études, et 600 millions de francs en fabrications (francs hors taxes au 01-01-1992), la partie spatiale militaire représentant environ 100 millions de francs.
• La charge utile militaire
La charge utile militaire comprend deux répéteurs (7/8 GHz) associés à une paire de cornets de couverture mondiale et à une balise non modulée, permettant le pointage des antennes au sol. Pour des raisons de délai, elle est entièrement sous-traitée par DSP à Ford Aerospace. Malgré la compétence reconnue de cette société, on rencontrera des difficultés (en particulier pour les alimentations des TOP) et des retards qui, heureusement, pourront être circonscrits dans le calendrier final de Telecom 1.
• Le segment sol
On distingue essentiellement quatre types de stations qui se particularisent par la taille des antennes, l’utilisation qui en est faite, et le nombre d’éléments constitutifs.
• Les trois stations terriennes métropolitaines fixes
Ces stations ont une antenne autopointée de 8 mètres de diamètre. Elles assurent l’ensemble du trafic du réseau avec les autres stations et entre elles.
• Les stations navales
Ces stations sont embarquées sur les bâtiments de la Marine nationale (une vingtaine de navires de taille égale ou supérieure aux corvettes, soit environ 3 000 tonnes). Chaque station est composée de deux antennes stabilisées 3 axes, de diamètre 1,5 mètre sous radôme (l’une ou l’autre, bâbord ou tribord, étant commutée en fonction des masques présentés par les superstructures du navire), d’un shelter transbordable installé sur le pont, et d’équipements déportés dans les locaux techniques du bâtiment.

Syracuse : antenne navale de 1,5 mètre
• Les stations terrestres mobiles

Station transportable de Syracuse I
Ces stations sont transportables par avion Transall. Chacune est composée d’une antenne de 3 mètres de diamètre et d’un shelter qui peut être installé sur camion.
• Les stations mobiles légères
Ces stations diffèrent des précédentes par un allègement de certains sous-ensembles : entre autres, antenne de taille réduite à 1,3 mètre, et émetteur de moindre puissance.
• L’organisation du programme
Cette affaire complexe et tendue du point de vue des délais nécessite la mise en place à la DGA d’une Direction de Programme placée au SCTI sous la responsabilité de l’ingénieur en chef Dages, et supervisée par un comité de direction présidé par l’ingénieur général Alberge, alors chef du SCTI.
Le comité directeur est assisté, pour la préparation de ses décisions par :
– un groupe opérationnel relevant de l’État-Major des armées (EMA-TEI), dont dépend l’officier de programme ;
– un groupe technique placé sous l’autorité du Directeur de Programme.
Les relations avec l’organisme responsable de Telecom 1 et les relations internationales (États-Unis, Royaume-Uni et OTAN) sont également assurées par le Directeur de Programme, l’ingénieur en chef Dages, à qui nous rendons ici hommage pour la perspicacité et l’opiniâtreté qu’il a manifestées, tant dans le domaine technique qu’en matière économique, tout au long des phases d’étude et de développement du segment militaire du système, en jouant à la fois le rôle de chef d’orchestre et d’aiguillon. Sans lui, SYRACUSE ne serait pas la réelle réussite reconnue de tous aujourd’hui.
• Les contrats
Du côté des réalisations, la totalité des contrats est notifiée à la Division Espace de Thomson-CSF.
La charge utile militaire fait partie du contrat principal du satellite passé par la DGT à MATRA qui sous-traite l’ensemble de la charge utile à Thomson-CSF (contrat passé en 1980).
Pour les stations sol, il faut monter des contrats assez complexes car, les délais étant très courts (quatre ans pour arriver à la série), il n’est pas possible de franchir toutes les étapes d’un programme militaire classique. Les études de base sont faites simultanément avec la réalisation des prototypes, et les commandes de série (ou tout au moins les approvisionnements) doivent être passées bien avant la fin de réalisation des prototypes.
Ces contrats sont bâtis entre la Direction Commerciale de DFH et l’IG Alberge qui est devenu Directeur de la Direction de l’Électronique et de l’Informatique, et qui confie le suivi au Service Technique de l’Électronique et de l’Informatique (STEI) dirigé par l’IGA Javelot (à l’époque ICA, décédé en 1998).
Les difficultés techniques (en particulier sur les synthétiseurs) entraînent des retards, aggravés par la séparation de DFH en deux divisions. La Division Espace est responsable de SYRACUSE I, Jean-Louis de Montlivault étant Directeur de Programme, et la Division Faisceaux Hertziens étudie et réalise les stations sol. Vers le milieu de 1982, il apparaît que le programme est en danger.
C’est pourquoi Gérard Coffinet, après avoir confié une mission d’audit à Alain Poquet, propose qu’une véritable équipe de maîtrise d’œuvre soit montée dans la Division Espace sous la direction d’Alain Poquet. Cette proposition est acceptée par Jacques Imbert, Jean Guibourg (DFH) et André Rapenne (DTC), à condition que l’équipe soit financée par la DGA. Ce qui est obtenu grâce à l’IG Alberge et à l’ICA Dages. Cette mesure essentielle sauvera le calendrier du programme et permettra de rester dans les coûts prévus.
• La maîtrise d’œuvre
Les prototypes étant satisfaisants, la puissance industrielle de Thomson-CSF se met alors à l’œuvre. La planification, l’organisation et la distribution du travail déclenchent sans inertie les bureaux et laboratoires d’étude pendant que les ateliers se préparent à traiter les liasses de «bons à fabriquer» qui déferleront quelques semaines plus tard, et cela sans relâche, jusque vers la fin des années quatre-vingt, en alimentant DFH, devenue ensuite Alcatel Thomson Faisceaux Hertziens puis Telspace, pour une grande partie des sous-ensembles, DRS Bagneux pour l’intégralité des antennes navales (source hyper, mécanique, asservissements, parabole, radôme), DTC Gennevilliers pour les châssis de codage d’accès SSMA (Spread Spectrum Multiple Access) et la téléphonie cryptée, mais aussi d’importants sous-traitants extérieurs à la Compagnie, par exemple pour les antennes terriennes de 8 et 3 mètres et les trois types de shelters nus.
Tout au long du déroulement du planning PERT, étroitement surveillé par les services techniques de la Défense, les équipements sortent en série des plates-formes d’essai et sont regroupés sur le site de Cergy-Pontoise (surfaces louées à Telspace) pour y être intégrés et présentés en recette usine au SIAR (Surveillance Industrielle de l’Armement), station par station. Cela nécessite la réalisation de «plots» (plates-formes d’essai spécifiques à chaque type de station), ce qui est un champ d’expérience essentiel pour SYRACUSE II.
Grâce à cette organisation industrielle «tentaculaire», et au prix des efforts de tous les participants, le programme SYRACUSE I tient les délais imposés. Le lancement de la fusée Ariane 3, le 4 août 1984, réussit la mise en orbite du satellite Telecom 1A. Ce satellite, comme le deuxième (Telecom 1B), lui aussi lancé avec succès, le 7 mai 1985, permet de faire enfin des essais en vraie grandeur du système. Un troisième satellite (Telecom 1C), initialement prévu au sol, sera lancé plus tard, ce qui permettra de maintenir le service offert jusqu’à l’arrivée des satellites Telecom 2.
Pour les stations à bord des navires, le prototype est installé sur la corvette ASM type C70, le Jean de Vienne, ce qui permet de valider les antennes et l’ensemble en fonctionnement. Cela constitue une première en France. Suivront quelques grandes réussites qui auront un fort retentissement :
– utilisation au Tchad en 1985 lors de troubles ;
– utilisation sur le croiseur De Grasse, pour faciliter l’évacuation des Français lors de troubles à Aden en 1986 ;
– essais lors de l’exposition du Bourget en 1985 entre le chef d’État-Major des armées, parlant depuis Paris, et le ministre de la Défense Charles Hernu, parlant depuis le Midi de la France, puis le lendemain un essai du même genre avec Berlin où est implantée la station SYRACUSE du gouvernement français de Berlin ;
– inauguration officielle de la station métropolitaine à Lanvéoc-Poulmic le 19 mars 1986, sous la présidence de l’amiral Louzeau.
L’État-Major, qui peut ainsi décider la mise en service opérationnelle en 1986, est enthousiasmé par les avantages opérationnels qu’apportent les télécommunications par satellite, et c’est ce qui motive la décision de lancer SYRACUSE II.
Les programmes militaires SYRACUSE II
Les caractéristiques générales de SYRACUSE II
La définition des satellites Telecom 1 s’est faite sur la base d’une durée de vie de sept années. Il était donc nécessaire, pour assurer la continuité du service, de prévoir des satellites destinés à succéder aux satellites Telecom 1 à partir de fin 1991.
Du côté militaire, les études lancées en 1983 permettent d’explorer plusieurs solutions techniques débouchant sur SYRACUSE II qui sera approuvé par le ministère de la Défense le 20 janvier 1987, dans le cadre des études, du développement et de la réalisation de trois satellites Telecom 2. Il s’agit de satellites mixtes DGT-DGA comprenant chacun, comme les précédents, une charge utile civile et une charge utile militaire.
Cependant, pendant l’année 1986, beaucoup d’efforts sont nécessaires pour qu’il y ait un véritable système militaire, avec en particulier une charge utile complète (coût de l’ordre de 1,5 milliard de francs), au lieu de simplement remplacer Telecom 1 à l’identique. L’amiral Louzeau, alors chef d’État-Major des armées, l’amiral Berges, chargé des programmes, et l’amiral Roitel sont les moteurs pendant cette période.
Gérard Coffinet, avant de quitter Alcatel Espace, mène toute cette période critique de négociation, en particulier avec la Direction des Engins et Missiles (chargée de l’espace), l’IGA Delaye, puis l’IGA Castellan. Un transfert des responsabilités entre la DEM et la DEI amène le STEI à diriger les travaux d’étude de SYRACUSE II.
La continuité du service de SYRACUSE I est assurée et l’accroissement du nombre des correspondants est permis par l’augmentation du nombre des répéteurs d’une part, et par l’introduction de raccordements en automatique avec l’ensemble des réseaux d’infrastructure militaires ainsi qu’avec certains réseaux civils d’autre part.
Une plus grande protection du système contre les agressions est prise en compte au niveau des satellites, ce qui nécessite la mise en place d’une voie de télécommande spécialisée permettant le bon fonctionnement de SYRACUSE II en cas de non-fonctionnement de la voie prévue pour les télécommunications civiles, et une balise distribuant l’heure du réseau à tous les utilisateurs du système.
La nécessité de régler le problème de l’interconnexion automatique entre SYRACUSE et le réseau de commandement Telemac conduit au concept de réseau de circuits SYRACUSE II, afin de banaliser les accès. La durée de vie des satellites est programmée pour dix années au lieu de sept.
L’organisation étatique
Au plan de l’organisation, le schéma SYRACUSE I a sensiblement été reconduit du côté étatique, l’ingénieur en chef de l’armement du Chené succédant à l’ICA Dages.
Une Direction de Programme est mise en place au STEI, sous la responsabilité de l’ICA du Chené. Au cours du programme, cette responsabilité sera assumée successivement par l’IPA Chenet, l’IPA Janichewsky, l’ICETA Tousten, l’IPA Lemeur et l’IA Faucoup.
Un comité directeur, responsable de l’ensemble du programme, et assisté du Directeur de Programme et de l’officier de programme, assure le pilotage des groupes techniques et opérationnels pour les composantes système, spatiale et sol.
Une douzaine de groupes de travail réunissent les états-majors, les futurs exploitants, la maîtrise d’œuvre et la Direction de Programme sur les différents sujets mettant en jeu la conception du système (simulation, raccordements, services offerts…). Cela permet de mettre en lumière l’importance de l’assurance qualité du système. Alcatel Espace peut ainsi mettre en œuvre des méthodes qui aboutiront à l’obtention par la société de la certification RAQ-1.
Le programme SYRACUSE II
Le programme militaire SYRACUSE II comprend donc la définition fine des spécifications techniques d’ensemble du système et de la charge utile correspondante, et le développement et la réalisation d’une centaine de stations terriennes.
Le coût prévisionnel du programme est de l’ordre de 8 milliards de francs, le système et le sol représentant environ 75 % de ce montant.
• La charge utile militaire
La charge utile militaire comprend cinq répéteurs transparents réservés au trafic auxquels sont associées différentes couvertures (globale en émission et réception pour la continuité de SYRACUSE I ; métropole vers globale et réciproquement pour les nouveaux services ; spot mobile pour une utilisation tactique, et enfin métropole/centre Europe), ainsi qu’une fonction de régénération à bord permettant la réception des télécommandes protégées, la diffusion des messages horaires à l’ensemble des stations depuis le satellite, et la diffusion de messages protégés depuis la métropole à l’ensemble des stations.
L’ensemble de ces nouvelles fonctionnalités, fondamentales pour le système, fait évoluer le segment sol vers une technicité nouvelle et très sophistiquée.
Basée au départ sur trois satellites dont un en réserve au sol, la nécessité de réaliser un quatrième satellite apparaît à France Telecom dès 1992, sachant que le système SYRACUSE est dimensionné pour un seul satellite opérationnel.
• Le segment sol
Le segment sol de SYRACUSE II comprend l’ensemble des stations SYRACUSE I, certaines étant aménagées pour assurer la nouvelle capacité du système ainsi que les nouveaux services offerts par SYRACUSE II, des stations supplémentaires du type SYRACUSE I, des stations de types nouveaux, un centre de contrôle du réseau destiné à gérer le trafic des communications, qu’elles soient établies manuellement ou automatiquement, et à permettre le raccordement aux différents réseaux tant métropolitains que distants (réseaux mobiles).
Les stations prévues au titre du programme sont d’environ une centaine, tous types confondus. Les caractéristiques de deux des stations métropolitaines sont grandement améliorées par l’étude, le développement et la réalisation de trois antennes de 18 mètres de diamètre.
Les stations mobiles sont plus légères, maniables et discrètes, leurs performances se caractérisent par de faibles puissances émises et des aériens de petites dimensions (0,4 et 0,9 mètre de diamètre) ; elles présentent une faible probabilité d’interception.
Les liaisons possibles avec SYRACUSE II sont :
– des liaisons télégraphiques à des débits compris entre 50 et 2 400 bits/s ;
– des liaisons téléphoniques cryptées au débit de 2 400 bits/s et en téléphonie delta au débit de 16 000 bits/s ;
– des liaisons de transmission de données à 2 400 et 16 000 bit/s en X25 ;
– des liaisons à n x 64 000 bit/s entre 64 kbits/s et 2 Mbits/s dites liaisons transparentes.
Les possibilités supplémentaires par rapport à SYRACUSE I permettent :
– la transmission de messages télégraphiques entre SYRACUSE et les réseaux télégraphiques militaires (Carsec, Antinéa, RTMM) via les réseaux de données des armées ;
– l’établissement de communications téléphoniques en automatique avec des abonnés équipés de terminaux compatibles reliés aux réseaux téléphoniques des armées (vers des usagers Ritter, RA70/90, Artemis) ;
– l’établissement de communications de données par paquets avec les réseaux de données des armées (Réséda, Rétinat, RTDM) ;
– des liaisons interstations métropolitaines à haut débit ainsi qu’avec des stations terrestres lourdes, ce qui permettra l’interconnexion avec des usagers RITA déportés sur les théâtres interopérations extérieurs.
• L’organisation du programme
Une maîtrise d’œuvre (MOSS) placée chez Alcatel Espace est initiée sous la responsabilité de Bruno Blachier, puis dirigée successivement par Claude Roche, Pierre Houzelot et Louis Le Gall. Pierre Houzelot ayant pris la direction en 1988, il assurera la responsabilité d’Alcatel Système de Défense (ASD) et mènera le programme jusqu’en 1994. Cette maîtrise d’œuvre composée au départ de personnel d’Alcatel Espace et Alcatel Telspace, sera, en 1988, concentrée uniquement sur Alcatel Espace, puis sur ASD jusqu’en 1994. L’ensemble du programme est ensuite dirigé par Serge Bertrand.
Par ailleurs, dès le démarrage du programme, une maîtrise d’œuvre de la composante sol (MOCOS) est confiée à Pierre Luginbuhl qui dirige une équipe intégrée Alcatel Espace/Alcatel Telspace. Cette maîtrise d’œuvre sera dirigée dès 1986 par Louis Le Gall.
En parallèle, une équipe intégrée Thomson/Alcatel, dénommée PIST (Pilote Industriel SYRACUSE Télémac), s’occupe du raccordement Télémac/SYRACUSE, en s’appuyant sur les études menées en commun depuis 1984, qui ont par la suite donné naissance au réseau de circuits sur lequel s’appuie SYRACUSE II.
Pour la composante spatiale, les études et la phase de définition des satellites Telecom 2 s’achèvent fin septembre 1987 par la remise à l’Administration de deux propositions, l’une de MATRA et l’autre de l’Aérospatiale, chacun des deux industriels étant associé à Alcatel Espace, pour la charge utile, au titre d’un accord de cotraitance.
Le choix du client se porte en novembre 1987 sur la proposition MATRA/Alcatel Espace sur plate-forme Eurostar 2000 de MATRA.
Le segment sol SYRACUSE II est négocié par Patrick Mollat du Jourdin, ancien officier de programme SYRACUSE I, assisté de Michel Pissarello.
Le centre militaire de contrôle des satellites est réalisé par le CNES, une partie étant sous-traitée au GIE Sat Control (CNES-Aérospatiale-MATRA).
Les lancements des satellites sont assurés par Arianespace, en décembre 1991 pour le premier, Telecom 2A, en avril 1992 pour le deuxième, Telecom 2B, le troisième, Telecom 2C restant initialement au sol en réserve. Telecom 2C sera, en définitive, lancé en décembre 1995, la décision de réaliser Telecom 2D étant prise à la même époque.
Un aménagement des besoins est alors exprimé par les opérationnels, ce qui fait l’objet d’un séminaire en avril-mai 1994, séminaire auquel participent tous les partenaires (Direction de Programme, utilisateurs, industriels…). Il aboutit à une nouvelle définition des besoins tant en services qu’en ressources, ce qui conduit les industriels à repenser certaines fonctions de base du système (essentiellement le dimensionnement en ressources pour chacun des services, ce qui amène à revoir l’ensemble des fonctions de supervision du système).
En définitive, la dernière version de SYRACUSE II devient opérationnelle dans le courant du second semestre 1997, après intégration par Alcatel Espace et de très nombreuses mesures de calibration et de recette système effectuées sur les différents sites.
Avec les nouveaux types de stations, le service est maintenant assuré à partir de véhicules légers de type 4 x 4, de navires de la Marine nationale de plus faible tonnage (une seule antenne de moindre diamètre), et de sous-marins en plongée périscopique (antenne installée sous un radôme étanche, le tout monté sur un mât hissable). Ce dernier type de transmission a été obtenu en première mondiale, dans cette bande de fréquence, dès novembre 1990, c’est-à-dire sur les premiers satellites Telecom 1, plus d’une année avant la mise en orbite de Telecom 2.
L’inauguration à France-Sud en novembre 1991 de la première liaison SHF opérationnelle avec un sous-marin, sous la présidence de Pierre Joxe, alors ministre de la Défense, vient concrétiser les travaux effectués.
• Les contrats
C’est à la fin de 1987, à l’issue de nombreux études et développements démarrés en 1983, qu’est signé le contrat par lequel le client DGA donne à Alcatel Espace la maîtrise d’œuvre du programme SYRACUSE II (composantes système et sol), d’un coût de plus de 5 milliards de francs de l’époque.
Les évolutions du système SYRACUSE II
Plus que tout autre programme, un système de télécommunications militaire doit rester performant. Il y est poussé d’abord par sa finalité, mais aussi par l’évolution technologique, beaucoup plus rapide dans le domaine des télécommunications que dans d’autres secteurs de l’armement. Cette évolution doit d’ailleurs être gérée intelligemment pour suivre celle du besoin opérationnel, sans constituer une trop lourde hypothèque sur la ressource financière du client. Les recettes de ce défi sont connues et efficaces : optimisation permanente du matériel existant, aide diligente des équipes de maîtrise d’œuvre apportée au client pour la redéfinition de son besoin, utilisation judicieuse des technologies civiles quand apparaît une synergie possible au niveau des applications.
Cette méthodologie, acceptée par tous les partenaires dès la signature du contrat, va se révéler fructueuse et se traduire concrètement dans la période 1990-1996 par des décisions et des actions significatives, à savoir :
– en décembre 1995, lancement du troisième satellite (Telecom 2C), initialement stocké au sol pour parer à un incident (qui ne s’est pas produit) ;
– lancement programmé en 1996 d’un quatrième satellite (Telecom 2D), colocalisé avec le satellite Telecom 2B, et exploitation simultanée au niveau système de deux satellites, nécessitée par l’établissement de liaisons à haut débit pour les nouveaux systèmes de commandement (SIC, RITA, AIDCOMAIR, STRIDA…), ces deux dernières dispositions étant destinées à faire vivre le segment spatial jusqu’aux environs de 2005 ;
– développement de capacités de secours mutuel entre les réseaux SYRACUSE (français) et Skynet (britannique), tant il est vrai que l’interopérabilité entre alliés est devenue une nécessité dans la gestion des crises régionales en Europe ou outre-mer. Ce développement inclut l’extension de la couverture géographique du système satellite dont l’intérêt opérationnel est évident ;
– mise en service dès 1996 d’une «passerelle» (à partir de la station de France-Sud) permettant aux bâtiments français utilisant SYRACUSE de travailler avec les bâtiments de l’US Navy utilisant le système Fleetsatcom en UHF. D’autres services sont développés, comme l’augmentation du débit de l’information pour les petites stations et le raccordement du système SYRACUSE aux autres réseaux de transmissions interarmées ;
– concrétisation courant 1996 des diverses propositions visant à regrouper l’ensemble des différents services de téléphonie et de données X25 dans une seule unité de raccordement. Il s’agit du programme COSYS, dont l’objectif est le raccordement de SYRACUSE à SOCRATE.

L’équipe SYRACUSE II à Toulouse
Les successeurs de SYRACUSE II
Fin 1995, l’équipe Alcatel, qui travaille sur le futur, bâtit ses hypothèses sur trois «certitudes» :
– le système SYRACUSE II cessera d’être opérationnel en 2005 (fin de durée de vie du segment spatial) ;
– il y a tout lieu de penser que le nouveau réseau sera multinational (au moins européen) pour d’évidentes raisons d’économies et d’interopérabilité ;
– l’expérience a montré que dix années ne sont pas de trop pour développer et mettre en service un nouveau réseau de communications militaires par satellite.
Plusieurs scénarios de coopération ont été imaginés et mis en œuvre depuis plusieurs années :
– Emilsatcom : coopération impliquant la majorité des grands pays européens ;
– Inmilsatcom : coopération entre les États-Unis, le Royaume-Uni et la France ;
– Bimilsatcom : coopération entre le Royaume-Uni et la France ;
– Gefmilsatcom : coopération entre l’Allemagne et la France.
Ces scénarios ont fait l’objet d’études techniques diverses. Aujourd’hui, la décision de coopération s’est portée sur Trimilsatcom, une cinquième possibilité regroupant l’Allemagne, la Grande-Bretagne et la France.
Deux études de définition doivent être menées en parallèle :
– l’une pilotée par MMS avec DASA et LOGICA ;
– l’autre pilotée par Alcatel Espace (intégrant Aérospatiale Cannes), avec SEL, BOSCH Telecom, BAE Defense System, Alcatel Telspace et Thomson-CSF. Alcatel Espace joue de nouveau, ici, son rôle de leader.
En parallèle, il convient de réfléchir à un système purement français, successeur de SYRACUSE II, palliatif en cas de retard ou de difficultés de Trimilsatcom.

L’équipe Syracuse II de Nanterre
Les programmes militaires : Helios
On a vu dans le chapitre consacré aux premières affaires militaires que le besoin d’un satellite d’observation était périodiquement exprimé par certaines autorités responsables.
Après l’agitation provoquée par le projet SAMRO au début de la décennie 80 et l’abandon de ce programme pour des raisons principalement budgétaires, la mise en service du satellite civil SPOT 1 en 1986 et les premiers résultats de son exploitation raniment les manifestations d’intérêt pour un programme de satellites d’observation à usage purement militaire.
Peu à peu, la machine se met en marche et la méthode la plus économique pour parvenir au but consiste, bien évidemment, à s’appuyer sur les développements déjà faits pour SPOT. Dans ce but, une collaboration est établie entre le CNES et la DGA comme cela avait déjà été envisagé à l’époque de SAMRO.
Afin d’améliorer encore les possibilités de financement, une participation internationale est recherchée. Après diverses péripéties inévitables dans ce genre d’entreprise, l’Italie et l’Espagne acceptent de participer. C’est ainsi que le programme Helios voit le jour et qu’il est conduit en parallèle avec celui de SPOT 4.
L’historique de ces deux programmes figurant dans le chapitre consacré à l’ensemble du programme SPOT, on ne reviendra ici que sur certains points particuliers à Helios.
Les éléments de SPOT directement reproduits dans Helios sont :
– la plate-forme ;
– les enregistreurs magnétiques;
– la télémesure image (TMI).
La participation d’Alcatel Espace porte sur :
– le compresseur formateur (COFO) des données ;
– la TMI.
Le compresseur formateur est assez voisin de l’équipement correspondant de la TMCU de SPOT. Il reçoit les données issues de l’électronique vidéo associée à l’instrument de prise de vue et, après compression et mise au format, les envoie vers l’équipement de cryptage.
La TMI, analogue à la partie radiofréquence de la TMCU de SPOT, comprend un modulateur QPSK, un amplificateur à TOP de 20 watts en bande X, un multiplexeur de sortie et une antenne d’émission.
Alcatel Espace est chargé de la maîtrise d’œuvre et de l’intégration finale de chacun des deux sous-ensembles. Il est également fournisseur des transpondeurs en bande S faisant partie du sous-système télécommande-télémesure de servitude du satellite.
En raison du financement international du programme, Alcatel Espace est invité à sous-traiter des travaux dans les pays participants. Dans le COFO, le convertisseur d’alimentation est sous-traité à Laben (Italie). Dans la TMI, le modulateur QPSK est sous-traité à Siemens Telecommu-nicazione (Italie), l’amplificateur à TOP à Thomson-CSF Tubes Électroniques, FIAR (Italie) réalisant l’alimentation correspondante, et l’antenne étant fournie par Starec. Alcatel Espace fournit l’OMUX et procède à l’intégration et aux essais de l’ensemble.
Dans les transpondeurs en bande S, Alcatel Espace se charge du développement spécifique du programme SPOT 4/Helios jusqu’au modèle d’identification (MI), puis de la réalisation et des essais de la partie radiofréquence des modèles de vol. La réalisation du reste des équipements, puis l’intégration et les essais d’ensemble des transpondeurs complets sont sous-traités à la filiale espagnole du groupe : Alcatel Espacio.
Ces multiples sous-traitances ne facilitent pas la gestion d’ensemble de la part du programme attribuée à Alcatel Espace qui prend quelque retard par rapport aux prévisions initiales, mais les dates de livraison des équipements restent compatibles avec les dates de besoin du client. Comme pour SPOT4, le chef de projet est Benoit Durand. Helios I est finalement mis en orbite le 7 juillet 1995 et son fonctionnement est satisfaisant.
Les programmes militaires : Cerise
L’origine du programme Cerise réside dans une initiative prise par Alcatel Espace de proposer à la DME (Direction des Missiles et de l’Espace), organisme faisant partie de la DGA (Délégation Générale à l’Armement), l’étude et la réalisation d’un système destiné à mesurer et à caractériser l’environnement radioélectrique dans une large bande de fréquences au moyen d’un satellite en orbite basse. Déjà, en 1970, Thomson-CSF avait proposé à la DTEN (Direction Technique des Engins) un projet analogue baptisé Satrape, lequel n’avait pas été poursuivi au-delà d’une préétude.
Les études préliminaires sont conduites dans la seconde moitié de la décennie quatre-vingt avant que le client n’accepte de traiter de gré à gré avec Alcatel Espace en tant que maître d’œuvre pour la fourniture du système complet, satellite et station terrienne d’exploitation, ainsi que pour la mise en exploitation de ce système.
Initialement, l’instrument devait être embarqué comme «passager» à bord du satellite SPOT 4.
Les études de phases O et A, conduites en 1987-1988, amènent à reconsidérer cette position et à faire effectuer la mission par un microsatellite en orbite basse d’une masse inférieure à 50 kilos et pouvant être lancé comme passager d’un vol d’Ariane.
L’objectif essentiel est le faible coût de l’expérience, malgré les contraintes techniques (capacité de stockage et de transmission des informations, faible consommation électrique des équipements, souplesse d’exploitation).
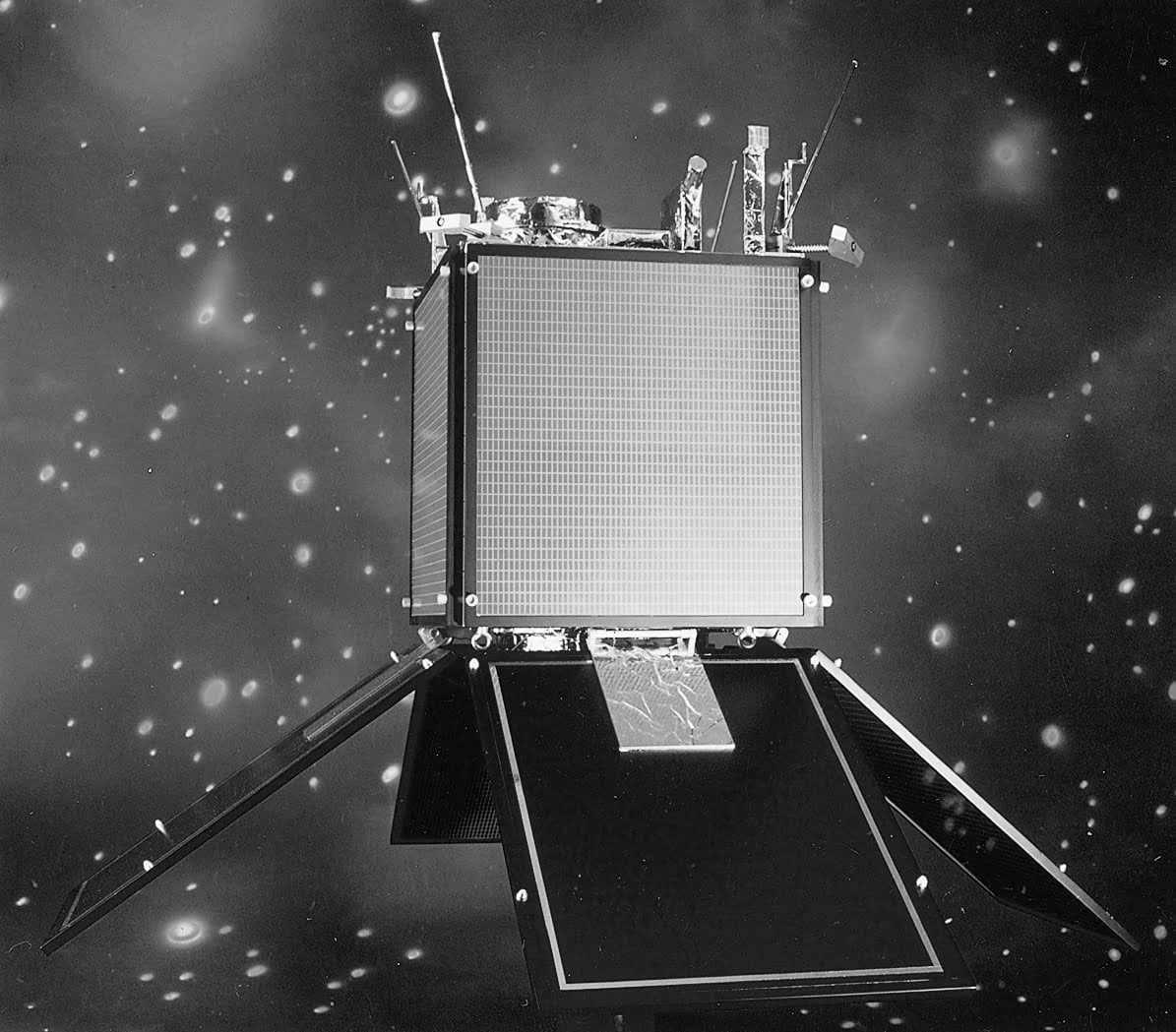
Cerise
Sur la recommandation de certains clients qui l’utilisent dans d’autres programmes, il est décidé de faire appel, pour la conception et la réalisation de la plate-forme, à une unité de réalisations techniques de l’université du Surrey (SSTL) en Grande-Bretagne.
La réalisation de l’instrument de bord, dérivé en partie d’un instrument similaire aéroporté mais qui doit être adapté aux contraintes spatiales, est partagée entre Alcatel Espace, maître d’œuvre, chargé de l’unité de traitement, et Thomson-CSF, sous-traitant pour l’unité de réception et les antennes.
La station terrienne est sous-traitée à SSTL. La phase B du programme commence en 1989 pour se terminer en juin 1990. Une prolongation de quatre mois est jugée nécessaire et notifiée en janvier 1991 pour un complément d’étude d’adaptation à la mission de la plate-forme développée par SSTL.
Après un début de phase de réalisation baptisée C1, de novembre 1991 à février 1992, la phase C/D est conduite de février 1992 à février 1995 sous la direction de Pierre de Château Thierry, chef de projet.
Elle est l’occasion, pour Alcatel Espace, de confirmer ses compétences dans la maîtrise d’œuvre d’un système complet. Le partenariat avec SSTL constitue une expérience originale. Un industriel ne parle pas vraiment la même langue qu’un laboratoire d’université britannique. Le parcours effectué montrera que chacun a beaucoup apporté à l’autre.
Après la mise en orbite, effectuée le 7 juillet 1995 par le lanceur Ariane qui emporte également Helios, le système Cerise fonctionne à la totale satisfaction du client qui avoue «avoir appris beaucoup avec Cerise»… mais les résultats sont classifiés !
Le 24 juillet 1996, Cerise entre apparemment en collision avec un débris que l’enquête révélera appartenir au troisième étage de la fusée Ariane qui avait lancé SPOT 1. Alcatel Espace participera activement, avec SSTL, à la remise du satellite dans un état permettant de reprendre son exploitation.
6.5 – Les stations de contrôle
Chaque satellite ou autre véhicule spatial ne peut être exploité sans être en liaison avec des moyens terrestres chargés de le localiser, de lui adresser des ordres de télécommande et de recevoir les signaux de télémesures qu’il émet pour rendre compte de l’activité de ses différents organes (servitudes de bord ou capteurs scientifiques). Ces fonctions sont remplies par des stations dites de contrôle qui peuvent en assurer chacune l’ensemble ou, au contraire, être spécialisées dans l’une ou l’autre d’entre elles. Selon la terminologie habituelle, ces stations font partie du «segment spatial» par opposition, par exemple, aux stations terriennes de télécommunications qui font partie, par définition, du «segment terrien».
Dès sa création, le CNES entreprend de s’équiper de moyens de contrôle pour ses futurs satellites et lance, dès 1963, deux appels d’offres pour les fournitures respectives de stations de localisation de satellites et de stations d’émission des signaux de télécommande et de réception des télémesures.
Les péripéties de l’attribution de chacun des deux marchés à l’une ou l’autre des deux sociétés, alors concurrentes, Thomson-Houston et CSF sont relatées dans les chapitres consacrés à leurs débuts respectifs dans le domaine de l’espace.
Finalement, Thomson gagne le marché des stations de localisation Diane, et CSF celui des stations de télécommande et de télémesures Iris.
Les stations Diane
Le CNES passe commande de deux stations de localisation de satellites à défilement par interférométrie. Les mesures interférométriques sont effectuées sur une raie émise par le satellite dans la bande des signaux de télémesures de 136 à 138 MHz. Le marché est notifié en 1964 à la Division RTT de Thomson, installée à Gennevilliers, qui assure la maîtrise d’œuvre et fournit la plus grande partie de l’électronique. Ses principaux sous-traitants sont STAREC, qui fournit les antennes, et Câbles de Lyon, qui fournit le réseau de câbles reliant les équipements de réception aux antennes.
Les stations sont installées en 1965, l’une à Pretoria en Afrique du Sud et l’autre à Hammaguir au Sahara. Cette dernière sera transférée à Kourou en 1968. Après leur étalonnage par photographies sur fond d’étoiles d’un émetteur aéroporté, elles seront maintenues opérationnelles pendant une vingtaine d’années. Une troisième station sera vendue à l’ESRO et installée en 1967 à Redu (Belgique).
Sur le plan technique, quelques points remarquables méritent d’être signalés :
– la grande résolution des mesures angulaires effectuées par deux bases de quatre antennes chacune disposées sur deux axes rectangulaires (nord-sud et est-ouest). La levée d’ambiguïté est obtenue au moyen d’un autre système de petites antennes. Le champ d’antennes occupe une superficie d’environ un hectare. Toutes sont fixes, les grandes étant du type à fente et donc particulièrement robustes et d’une grande simplicité de réalisation, permettant à la proposition de Thomson d’offrir un prix très compétitif par rapport aux antennes proposées par le concurrent CSF qui sont du type hélicoïdal et qui, malgré une conception technique remarquable, conduisent certainement à des prix de fabrication plus élevés ;
– des câbles coaxiaux à diélectrique air de fort diamètre pour réduire l’affaiblissement relient le champ d’antennes à la station ;
– les récepteurs à faible facteur de bruit et à commande automatique de phase équipés de transistors ;
– la résolution très fine (1/1000 tour) des phasemètres utilisés pour les mesures ;
– la numérisation des résultats des mesures extraits en station avant leur transmission par Télex vers la métropole.
Les stations Iris
Le marché pour la réalisation de six stations de réception des signaux de télémesures et d’émission des signaux de télécommande est notifié à CSF en 1964.
Le maître d’œuvre est le Groupement d’études spatiales (GES) installé à Corbeville. Les réalisations industrielles sont effectuées dans les établissements de Levallois et de Sartrouville. Le principal sous-traitant est Elecma pour les antennes.
Six stations sont fabriquées, dont deux intégrées en conteneurs transportables. Elles sont installées en Afrique et dans les régions méditerranéennes.
Les points qui méritent d’être signalés sur le plan technique sont :
– les récepteurs à faible facteur de bruit, à commande automatique de phase, équipés de transistors ;
– une fonction télémétrie exploitant l’effet Doppler et mise en œuvre au moyen d’un compteur du commerce modifié.
Les activités sol après Diane et Iris
Dans le chapitre consacré aux débuts des activités spatiales à Gennevilliers, certaines réalisations de matériels de contrôle au sol sont mentionnées. Elles sont brièvement rappelées ci dessous :
– un système de réception de télémesures PFM pour les satellites Diamant ;
– un système de réception de télémesures PCM pour les familles de satellites suivantes ;
– un système de distribution du temps pour le centre spatial de Kourou ainsi que pour l’ESRO.
De 1967 à 1982, ni la Division MAS ni les Départements ESA et DSP ne se voient attribuer de responsabilités dans le domaine des stations de contrôle. Leurs moyens industriels et leur personnel technique sont spécialisés dans le domaine des matériels embarqués, dont la réalisation met en œuvre un état d’esprit et des procédures très mal adaptés à la conception et à la production de matériels sol dans des conditions économiques. Pendant une quinzaine d’années, la taille relativement réduite des unités successives chargées des activités de satellites ne permettra pas d’y adjoindre de moyens spécifiques des activités sol, dont la charge de travail serait par trop aléatoire.
Durant cette période, diverses unités de Thomson CSF réalisent un certain nombre de matériels destinés au contrôle des satellites ou de leur lancement et dont les techniques et les technologies font partie de leur domaine habituel d’activité. On peut citer :
– jusqu’en 1970 les radars de trajectographie Aquitaine puis Bretagne réalisés à Bagneux par la Division Radars de Surface de Thomson et installés sur la base de Kourou ;
– en 1968, la Division Faisceaux Hertziens de Thomson-CSF installée à Levallois fournit des faisceaux hertziens et des équipements de réception de télémesures ;
– en 1973, le GIE Telspace, dont Thomson-CSF et la CGE sont membres, fournit la station de contrôle pour satellite géostationnaire du programme Symphonie.
Les stations d’Eutelsat II
À partir du milieu des années quatre-vingt, Alcatel Espace (ATES) atteint une taille suffisante pour pouvoir, sans risques excessifs, diversifier en partie ses activités vers le domaine des stations de contrôle, y compris les maîtrises d’œuvre. C’est un moyen supplémentaire d’utiliser, avec des investissements raisonnables, des personnels et des moyens techniques disponibles, contribuant à la régulation des plans de charge et améliorant la connaissance des systèmes complets.
À partir de 1987, ATES participe largement à la réalisation des deux stations développées spécifiquement par l’organisation Eutelsat pour la surveillance et le maintien à poste des satellites géostationnaires de deuxième génération Eutelsat II. Ces stations assurent les liaisons de télémesure, télécommande et télémétrie avec les satellites en orbite pour le compte du centre de contrôle installé à Paris. Elles seront implantées à Rambouillet et à Sintra (Portugal).
Sous la maîtrise d’œuvre de Logica (Grande-Bretagne), ATES est responsable du sous-système en bande de base alors que Telspace, filiale d’Alcatel Faisceaux Hertziens, est responsable du sous-système hyperfréquences. L’un et l’autre font l’objet de marchés séparés avec le client. Étant déjà présent dans la composante spatiale du système, ATES apporte une garantie de bonne compatibilité.
Le contrat est signé le 15 avril 1987. Les fonctions de chef de projet sont remplies à ATES par Noël Thébault. La réception des installations sur le site est prononcée le 31 mars 1989.
La conception modulaire de l’architecture favorise l’extension jusqu’à six satellites de la configuration prévue initialement pour trois. En outre, cette conception facilite la maintenance et l’exploitation opérationnelle.
Deux chaînes de télécommande assurent la réception des messages émis par le centre de contrôle, le contrôle de leur validité, leur transmission vers la partie émission de la station et la génération d’un compte-rendu.
Trois chaînes de réception exécutent la démodulation et la synchronisation des messages de télémesure venant des satellites et leur transfert vers le centre de contrôle, avec une visualisation locale de certains paramètres.
La chaîne de télémétrie comprend un modulateur, un récepteur, un générateur-extracteur de tons et un dispositif d’appréciation d’intervalle et de contrôle.
Une unité de distribution du temps effectue la datation des événements.
Une unité de télégestion assure le contrôle de la configuration des équipements et leur surveillance.
Les informations entre sites sont transmises sur le réseau X25.
La station de contrôle des Kerguelen
Cette station de suivi des satellites opère en bande S (2 GHz) et complète le réseau spécifique du CNES, après les stations de Kourou, Pretoria et Toulouse-Aussaguel. Ce réseau est particulièrement bien adapté aux satellites lancés depuis Kourou ou les centres de lancement indien et japonais, ainsi qu’aux satellites à défilement d’observation de la Terre placés en orbite polaire. L’exploitation de la station est prévue en mode «local» ou «distant», à partir du centre d’opérations du CNES, par l’intermédiaire d’une liaison à 128 kbits/s.

Baies de la station des Kerguelen
Le marché de maîtrise d’œuvre est signé en 1989 avec ATES qui s’assure le concours d’une vingtaine d’industriels européens. Bernard Wagner est désigné comme chef de projet. La station est recettée sur le site des Kerguelen le 5 mai 1995. Suivant les dispositions contractuelles, elle demeure la propriété d’ATES pendant cinq ans. L’exploitation en est assurée par Cegelec pour une mission nominale de six passages de satellites par jour pendant dix ans.
L’environnement particulièrement hostile et le caractère aléatoire de l’accès au site (liaison maritime uniquement) imposent des conditions particulières :
– grande sûreté de fonctionnement, c’est-à-dire fiabilité, sécurité, disponibilité, maintenabilité. La disponibilité opérationnelle de la station est supérieure à 98 % en totale autonomie entre deux rotations de navires ;
– une intégration complète du système et une série d’essais sont réalisées à Toulouse avant démontage et expédition par voie maritime.

Antenne de la station des Kerguelen sous le radôme de Candie
Les principaux sous-systèmes comprennent :
– le radôme de protection de 15 mètres de diamètre, composé de 120 panneaux de polyuréthane et verre époxy ;
– l’antenne principale du type Cassegrain à réflecteur parabolique de 10 mètres de diamètre, pilotable suivant différents modes ;
– l’antenne de désignation d’objectif, de 1 mètre de diamètre, qui assiste l’antenne principale pour la recherche et les passages du satellite au zénith ;
– une chaîne de réception de synchronisation primaire et secondaire et de datation des télémesures ;
– un amplificateur de puissance de 1 kilowatt à l’état solide composé de 20 modules élémentaires de 60 watts en autoredondance ;
– une unité de traitement et de stockage des informations après correction des données de localisation en fonction du calibrage et des erreurs de propagation troposphériques ;
– une horloge atomique au césium.
Les premiers satellites utilisateurs de la station sont Helios et Cerise.
Les stations de contrôle de Turksat
Le programme Turksat où ATES fournit «clés en main» un système complet de télécommunications par satellites comprend, entre autres, la livraison, l’installation et la mise en service de deux stations de contrôle. Les détails correspondants sont donnés dans le chapitre consacré à l’ensemble de ce programme.